

AUV Recovery Technology Development Based on Unmanned Surface Platform
-
摘要: 使用专用保障母船对自主水下航行器(AUV)进行运载、布放、回收、定位支持、状态监控和能源补给等任务的传统施工方式效费比较低, 因此各科研、工程机构开始研究使用无人艇(USV)搭载AUV并提供必要的技术保障, 其中AUV的自主回收技术至关重要。文中首先介绍了AUV回收技术的发展概况;并对水面滑轨式、水面舱坞式和水下坞站式等3种基于USV平台的AUV自主回收方式进行了详细梳理;最后重点分析了AUV自主回收的关键技术,包括USV集成的布放回收系统设计、AUV引导捕获装置设计和跨介质协同控制等3个方面。旨在为突破关键技术、发展针对AUV作业支持与保障的一体化水面无人平台、提高AUV作业效率、降低施工风险和成本提供研究思路。Abstract: The traditional construction methods involving carrying, distributing, recycling, positioning support, state monitoring, and energy supply for autonomous undersea vehicles (AUVs) via a specific support mothership are relatively expensive as well as low in efficiency. Therefore, various scientific research and engineering institutions have begun to study the use of unmanned surface vessels (USVs) for carrying AUVs and providing the necessary technical support. Automatic recovery technology for AUVs is crucial. Accordingly, the development of AUV recovery technology is first introduced herein. Then, AUV autonomous recovery methods based on USV platforms are summarized, including surface slide type, surface cabin dock type, and underwater docking station type. Finally, the key technologies of AUV autonomous recovery are analyzed, including the design of USV-integrated launch and recovery systems, AUV guidance capture devices, and cross-media collaborative control. Thus, this study aims to provide research ideas for breaking through key technologies, develop integrated surface unmanned platforms for AUV operational support and guarantee of AUV operation, improve AUV operational efficiency, and reduce construction risks and cost.
-

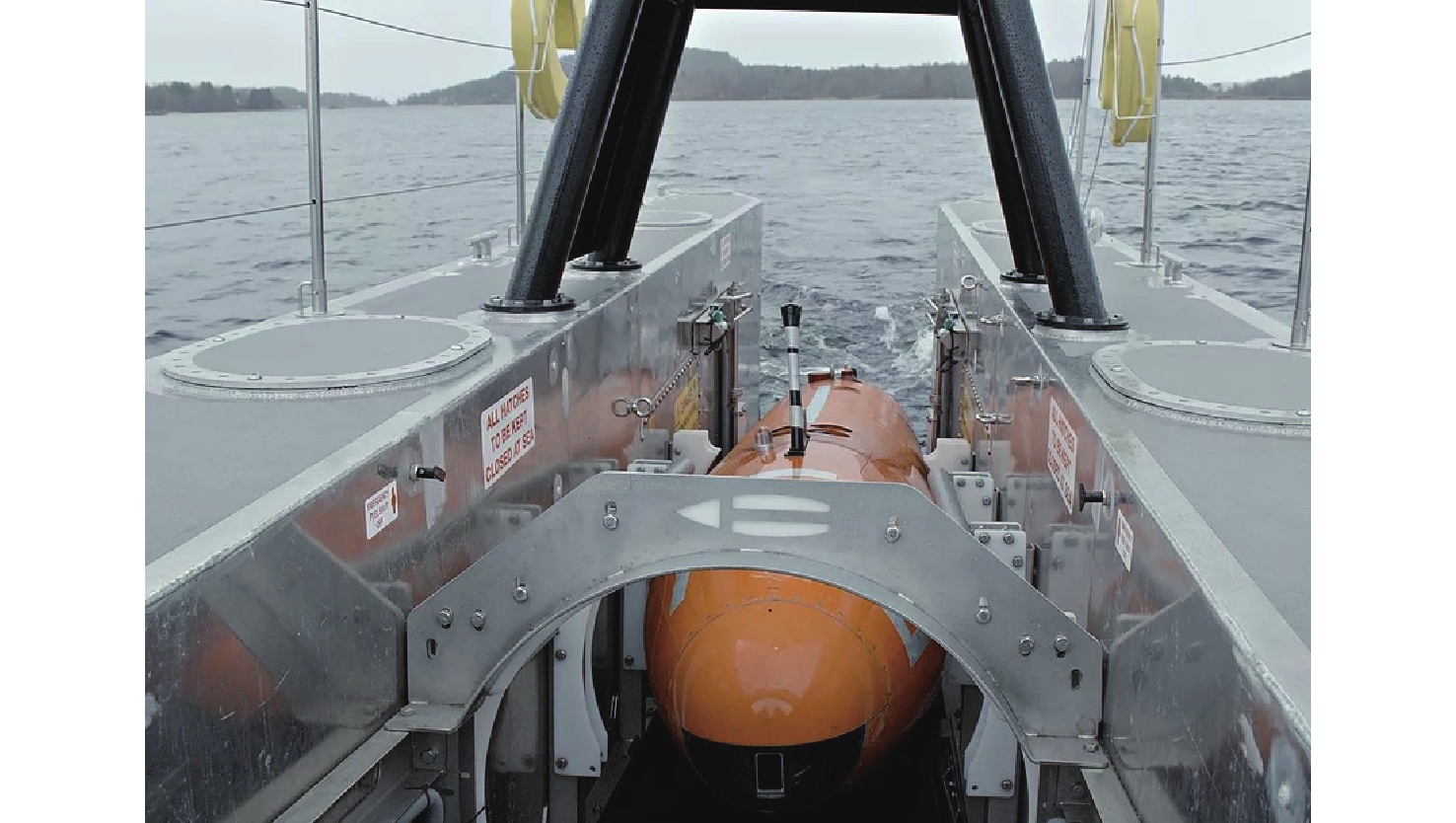
图 5 “Maxlimer”号艉部收纳、布放、回收AUV的舱坞
Figure 5. Stern dock of Maxlimer for receiving, deployment and recovering an AUV

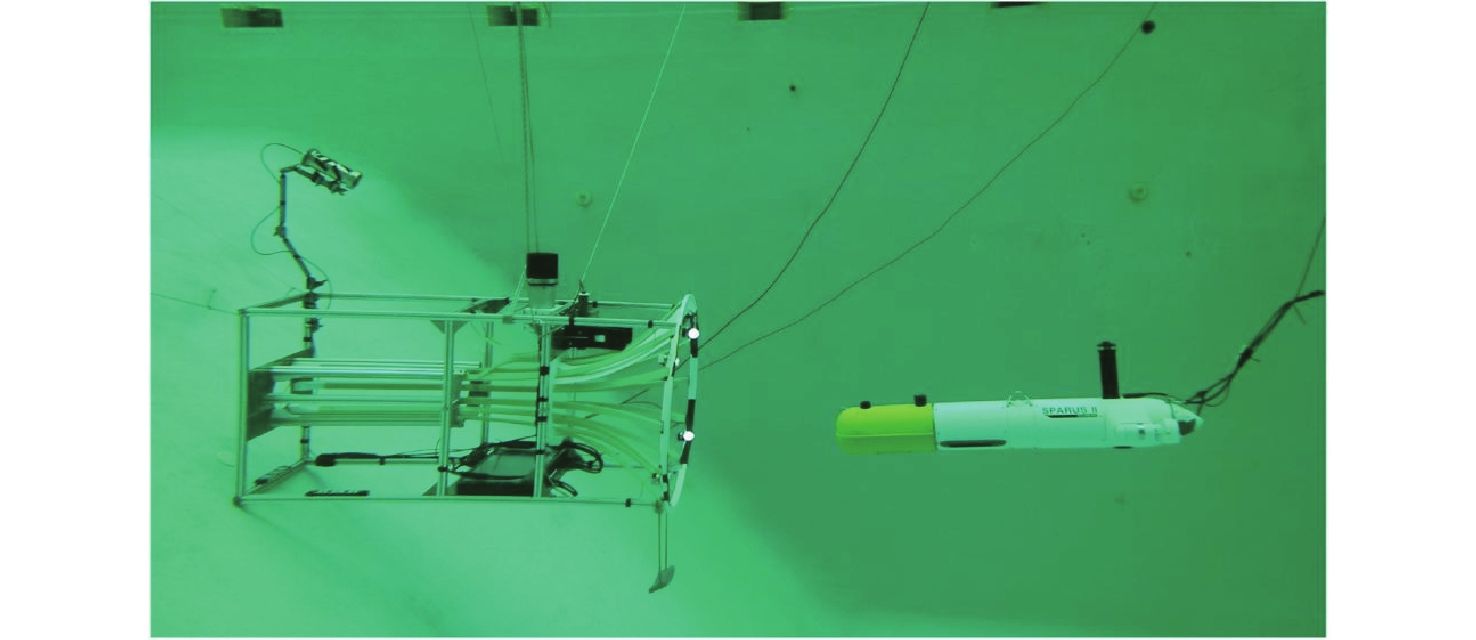
图 6 水下拖曳式坞站回收大型AUV示意图
Figure 6. schematic diagram of underwater towed docking station recovery a large AUV
表 1 AUV自主回收方式比较
Table 1. Comparison of AUV automatic recovery modes
回收方式 简介 优点 缺点 适用
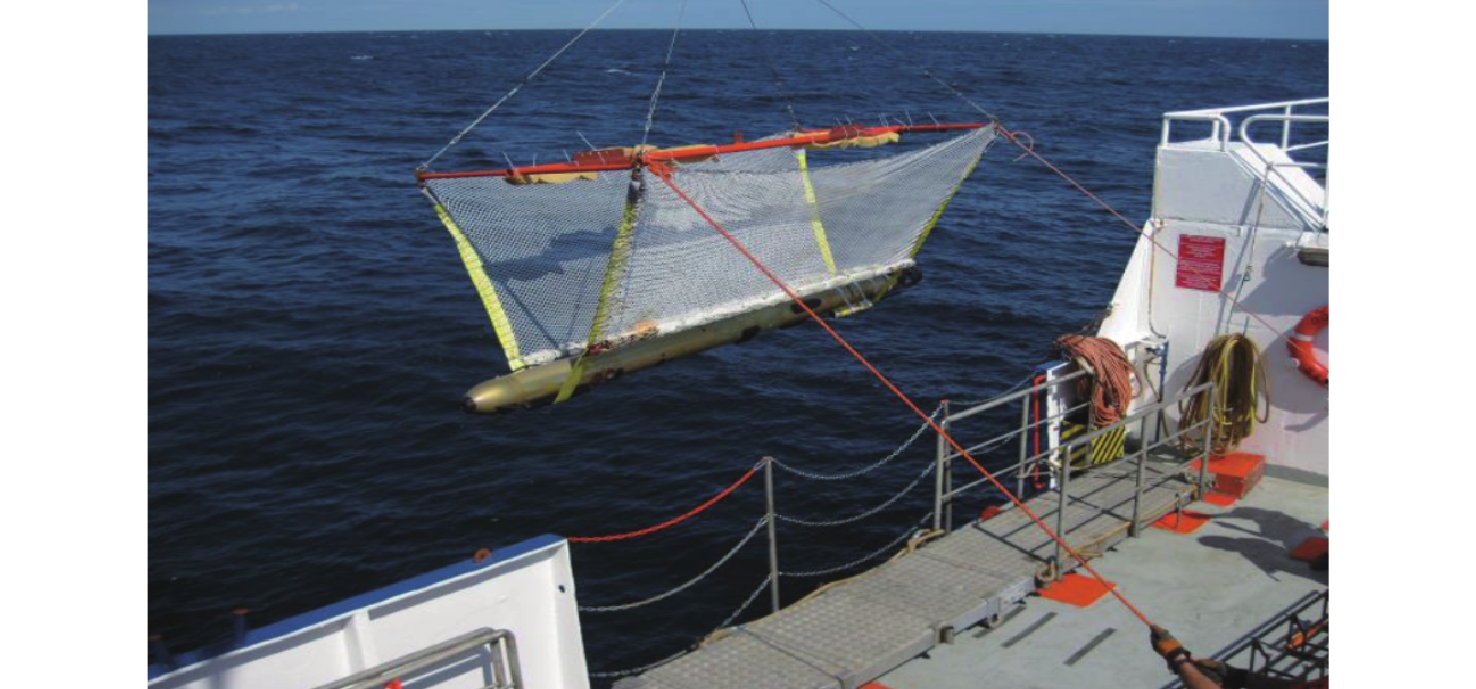
对象水面起吊式 保障船艉部加装起吊装置, 操控AUV浮出水面与吊钩对接后起吊至船上回收装置。 自动化要求低, 适用于全类型AUV回收布放。 自动化程度低, 受海况影响显著, 人力物力成本大。 大尺寸深海作业AUV 水下机械臂捕获式 操控潜艇加装的机械臂在水下捕获AUV至鱼雷管。 受海面海况影响小, 自动化程度高。 回收过程复杂, 导航控制精度要求高; 仅适用于水下航行器作为保障平台。 小尺寸柱形近海作业AUV 水下杆类对接式 操控AUV使其加装的对接杆与回收装置锁死机构对接锁死后按完成回收。 对接简便易操作,自动化程度高, 对接容错率高。 AUV结构体加装导向杆, 易受海流影响。 中小尺寸柱形近海作业AUV 水下驮带式 操控AUV至保障船底加装的钩索机构锁死后完成回收。 隐蔽性强, 适用于执行高隐蔽作业要求的探测任务。 仅适用于水下航行器作为保障平台。 中尺寸扁形深海作业AUV 水下舱笼对接式 操控AUV至水下回收笼装置, 牵引至水面回收装置。 自动化程度高, 对接容错率高。 自动化程度要求高, 导航控制技术复杂。 中尺寸柱形深海作业AUV  下载: 导出CSV
下载: 导出CSV
-
[1] 潘光, 黄明明, 宋保维, 等. AUV回收技术现状及发展趋势[J]. 鱼雷技术, 2008, 16(6): 10-14.Pan Guang, Huang Mingming, Song Baowei, et al. Current situation and development trend of AUV recovery technology[J]. Journal of Unmanned Undersea Systems, 2008, 16(6): 10-14. [2] 侯海平, 付春龙, 赵楠, 等. 智能自主式水下航行器技术发展研究[J]. 舰船科学技术, 2022, 44(1): 86-90. doi: 10.3404/j.issn.1672-7649.2022.01.017Hou Haiping, Fu Chunlong, Zhao Nan, et al. Research on technology development of the intelligent AUV[J]. Ship Science and Technology, 2022, 44(1): 86-90. doi: 10.3404/j.issn.1672-7649.2022.01.017 [3] 高剑客, 刘涵, 蒲进菁, 等. 无人船声学探测设备集成设计优化方法研究[J]. 海洋测绘, 2019, 39(2): 71-74. doi: 10.3969/j.issn.1671-3044.2019.02.016Gao Jianke, Liu Han, Pu Jinjing, et al. Research on integrated design optimization method of acoustic detection equipment for unmanned surface vehicle[J]. Hydrographic Surveying and Charting, 2019, 39(2): 71-74. doi: 10.3969/j.issn.1671-3044.2019.02.016 [4] 杜俊, 谷海涛, 孟令帅, 等. 面向 USV 的 AUV 自主回收装置设计及其水动力分析[J]. 工程设计学报, 2018, 25(1): 35-42. doi: 10.3785/j.issn.1006-754X.2018.01.005Du Jun, Gu Haitao, Meng Lingshuai, et al. Design and hydrodynamic analysis of AUV self-recovery device for USV[J]. Chinese Journal of Engineering Design, 2018, 25(1): 35-42. doi: 10.3785/j.issn.1006-754X.2018.01.005 [5] 董超, 刘蔚, 李雪, 等. 无人水面艇海洋调查国内应用进展与展望[J]. 导航与控制, 2019, 18(1): 1-9, 43.Dong Chao, Liu Wei, Li Xue, et al. Marine survey with unmanned surface vehicle: Application progress and prospect in china[J]. Navigation and Control, 2019, 18(1): 1-9, 43. [6] Sharp K, Cronin D, Small D, et al. A cocoon-based shipboard launch and recovery system for large autonomous underwater vehicles[C]//Oceans2002. Biloxi, MI, USA: IEEE, 2002. [7] 霍萍, 刘璟璐. 10896 米!“悟空号”AUV 再创潜深纪录[EB/OL]. (2021-11-16)[2022-10-14]. http://news.hrbeu.edu.cn/info/1141/68975.htm.2021. [8] 白桂强, 谷海涛, 王子庆, 等. AUV自主回收捕获机构设计与分析[J]. 舰船科学技术, 2020, 42(23): 52-57. doi: 10.3404/j.issn.1672-7649.2020.12.010Bai Guiqiang, Gu Haitao, Wang Ziqing, et al. Design and analysis of AUV autonomous recovery and capture mechanism[J]. Ship Science and Technology, 2020, 42(23): 52-57. doi: 10.3404/j.issn.1672-7649.2020.12.010 [9] 孙叶义, 武皓微, 李晔, 等. 智能无人水下航行器水下回收对接技术综述[J]. 哈尔滨工程大学学报, 2019, 40(1): 1-11. doi: 10.11990/jheu.201712014Sun Yeyi, Wu Haowei, Li Ye, et al. Summary of AUV underwater recycle docking technology[J]. Journal of Harbin Engineering University, 2019, 40(1): 1-11. doi: 10.11990/jheu.201712014 [10] Kawasaki T, Fukasawa T, Noguchi T, et al. Development of AUV marine bird with underwater docking and recharging system[C]//International Workshop on Scientific Use of Submarine Cables & Related Technologies. Tokyo, Japan: IEEE, 2003. [11] 蒲进菁, 刘涵, 江云华, 等. 无人船现状及发展趋势综述[J]. 海洋信息, 2020, 35(1): 6-11. doi: 10.19661/j.cnki.mi.2020.01.002Pu Jinjing, Liu Han, Jiang Yunhua, et al. Summary of the status and development trends of unmanned surface vehicle[J]. Journal of Marine Information, 2020, 35(1): 6-11. doi: 10.19661/j.cnki.mi.2020.01.002 [12] 李默竹, 郑荣, 魏奥博, 等. AUV水下对接装置控制系统设计[J]. 海洋工程, 2019, 37(2): 127-137. doi: 10.16483/j.issn.1005-9865.2019.02.015Li Mozhu, Zheng Rong, Wei Aobo, et al. Design of control system for AUV underwater docking device[J]. The Ocean Engineering, 2019, 37(2): 127-137. doi: 10.16483/j.issn.1005-9865.2019.02.015 [13] 陈佳伦, 谷海涛, 林扬, 等. 面向一体化系统的USV水面回收AUV的水动力特性分析[J]. 舰船科学技术, 2020, 42(5): 77-84. doi: 10.3404/j.issn.1672-7649.2020.03.016Chen Jialun, Gu Haitao, Lin Yang, et al. Hydrodynamic analysis of AUV recovery on the water by USV based on the integrated system[J]. Ship Science and Technology, 2020, 42(5): 77-84. doi: 10.3404/j.issn.1672-7649.2020.03.016 [14] 郑华荣, 魏艳, 瞿逢重. 水面无人艇研究现状[J]. 中国造船, 2020, 61(Z1): 228-240. doi: 10.3969/j.issn.1000-4882.2020.z1.028Zheng Huarong, Wei Yan, Zhai Fengzhong. Review on recent developments of unmanned marine surface vessels[J]. Shipbuilding of China, 2020, 61(Z1): 228-240. doi: 10.3969/j.issn.1000-4882.2020.z1.028 [15] Yazdani A M, Sammut K, Yakimenko O, et al. A survey of underwater docking guidance systems[J]. Robotics and Autonomous Systems, 2020, 124: 103382. doi: 10.1016/j.robot.2019.103382 [16] Gunvor H M. New AUV LARS solution[EB/OL]. (2020-03-31)[2022-10-14]. https://www.km.kongsberg.com,March.2020. [17] Zwolak K, Simpson B, Anderson B, et al. An unmanned seafloor mapping system: The concept of an AUV integrated with the newly designed USV SEA-KIT[C]//Oceans 2017 IEEE. Aberdeen, UK: IEEE, 2017. [18] Pinto V H, Cruz N A, Rui M A, et al. ALARS-automated launch and recovery system for AUVs[C]//Oceans 2018 MTS/IEEE. Charleston, USA: IEEE, 2018. [19] Nicholson J W, Healey A J. The present state of autonomous underwater vehicle(AUV) applications and technologies[J]. Marine Technology Society Journal, 2008, 42(1): 44-51. [20] Stokey R, Purcell M. A docking system for REMUS an autonomous underwater vehicle[C]//Oceans 1997. Halifax, NS, Canada: IEEE, 1997. [21] Circle B N. Underwater mobile docking of autonomous underwater vehicles[C]//Oceans 2012 MTS/IEEE. Hangzhou, China: IEEE, 2012. [22] 郑荣, 辛传龙, 汤钟, 等. 无人水面艇自主部署自主水下机器人平台技术综述[J]. 兵工学报, 2020, 41(8): 1675-1687. doi: 10.3969/j.issn.1000-1093.2020.08.022Zheng Rong, Xin Chuanlong, Tang Zhong, et al. Review on the platform technology of autonomous deployment of AUV by USV[J]. Acta Armamentarii, 2020, 41(8): 1675-1687. doi: 10.3969/j.issn.1000-1093.2020.08.022 [23] Sarda E I, Dhanak M R. A USV-based automated launch and recovery system for AUVs[J]. IEEE Journal of Oceanic Engineering, 2017, 42(1): 37-55. [24] Manhar R D, Ananthakrishnan P, John F, et al. Seakeeping characteristics of a wave-adaptive modular unmanned surface vehicle[C]//ASME International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France: American Society of Mechanical Engineers, 2013. [25] 袁学庆,刁家宇,李卫民,等. AUV水下对接的发展与应用现状[J]. 舰船科学技术, 2023, 45(5): 1-8. doi: 10.3404/j.issn.1672-7649.2023.05.001Yuan Xueqing, Diao Jiayu, Li Weimin, et al. Development and application status of AUV underwater docking[J]. Ship Science and Technology, 2023, 45(5): 1-8. doi: 10.3404/j.issn.1672-7649.2023.05.001 [26] Sarda E I, Dhanak M R. Concept for a USV-based autonomous launch and recovery system[C]//Launch and Recovery 2014. Baltimore, MD, USA: IEEE, 2014. [27] Circle B N. Underwater mobile docking of autonomous underwater vehicles[C]//2012 Oceans. Hampton Roads, VA, USA: IEEE, 2012. [28] Stokey R, Purcell M, Forrester N, et al. A docking system for REMUS, an autonomous underwater vehicle[C]//1997 Oceans IEEE. New York, NY, USA: IEEE, 1997. [29] Hobson B W, Mcewen R S, Erickson J, et al. The development and ocean testing of an AUV docking station for a 21″AUV[C]//Oceans 2007. Vancouver, BC, Canada: IEEE, 2007. [30] Li Y, Jiang Y Q, Cao J, et al. AUV docking experiments based on vision positioning using two cameras[J]. Ocean Engineering, 2015, 110: 163-173. doi: 10.1016/j.oceaneng.2015.10.015 [31] Sato Y, Maki T, Matsuda T, et al. Detailed 3D seafloor imaging of Kagoshima Bay by AUV tri-ton2[C]//2015 IEEE Underwater Technology. Chennai, India: IEEE, 2015. [32] 范刚, 张亚, 赵河明, 等. 水下机器人定位导航技术发展现状与分析[J]. 兵器装备工程学报, 2022, 43(3): 22-29. doi: 10.11809/bqzbgcxb2022.03.003Fan Gang, Zhang Ya, Zhao Heming, et al. Underwater robot positioning and navigation technology development status and analysis[J]. Journal of Ordnance Equipment Engineering, 2022, 43(3): 22-29. doi: 10.11809/bqzbgcxb2022.03.003 [33] Feezor M D, Blankinship P R. Autonomous underwater vehicle homing docking via electromagnetic guidance[C]//Oceans’97 MTS/IEEE Conference. Halifax, NS, Canada : IEEE , 1997. [34] Park J Y, Jun B H, Kim K, et al. Improvement of vision guided underwater docking for small AUV ISiMI[C]//Oceans 2009. Biloxi, MS: IEEE, 2009. [35] Ferrari S, Foderaro G. A potential field approach to finding minimum-exposure pathsin wireless sensor networks[C]//International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. [36] Hurtos N, Mallios A, Palomeras N, et al. Loon-dock: AUV homing and docking for high-bandwidth data transmission[C]//Oceans 2017 Conference. Aberdeen, UK: IEEE, 2017. [37] Li Y, Jiang Y Q, Cao J, et al. AUV Docking experiments based on vision positioning using two cameras[J]. Ocean engineering, 2015, 110: 163-173. [38] Yang C, Peng S, Fan S, et al. Study on docking guidance algorithm for hybrid underwater glider in currents[J]. Ocean Engineering, 2016, 125: 170-181. [39] 赵朝闻, 张淞, 李辉. 基于超短基线的AUV自主对接流程及算法[J]. 鱼雷技术, 2016, 24(3): 166-171.Zhao Zhaowen, Zhang Song, Li Hui. Autonomous abutting joint flow and control algorithm for AUV based on ultra-short baseline[J]. Torpedo Technology, 2016, 24(3): 166-171. [40] Zacchini L, Ridolfi A, Topini A, et al. Deep learning for on-board AUV automatic target recognition for optical and acoustic imagery[J]. IFAC-Papers on Line, 2020, 53(2): 14589-14594. doi: 10.1016/j.ifacol.2020.12.1466 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 2113
- HTML全文浏览量: 731
- PDF下载量: 292
- 被引次数: 0

图(10) / 表(1)




