

Modular Design of Lithium-ion Battery Packs for Cylindrical Battery Cabins of AUV
-
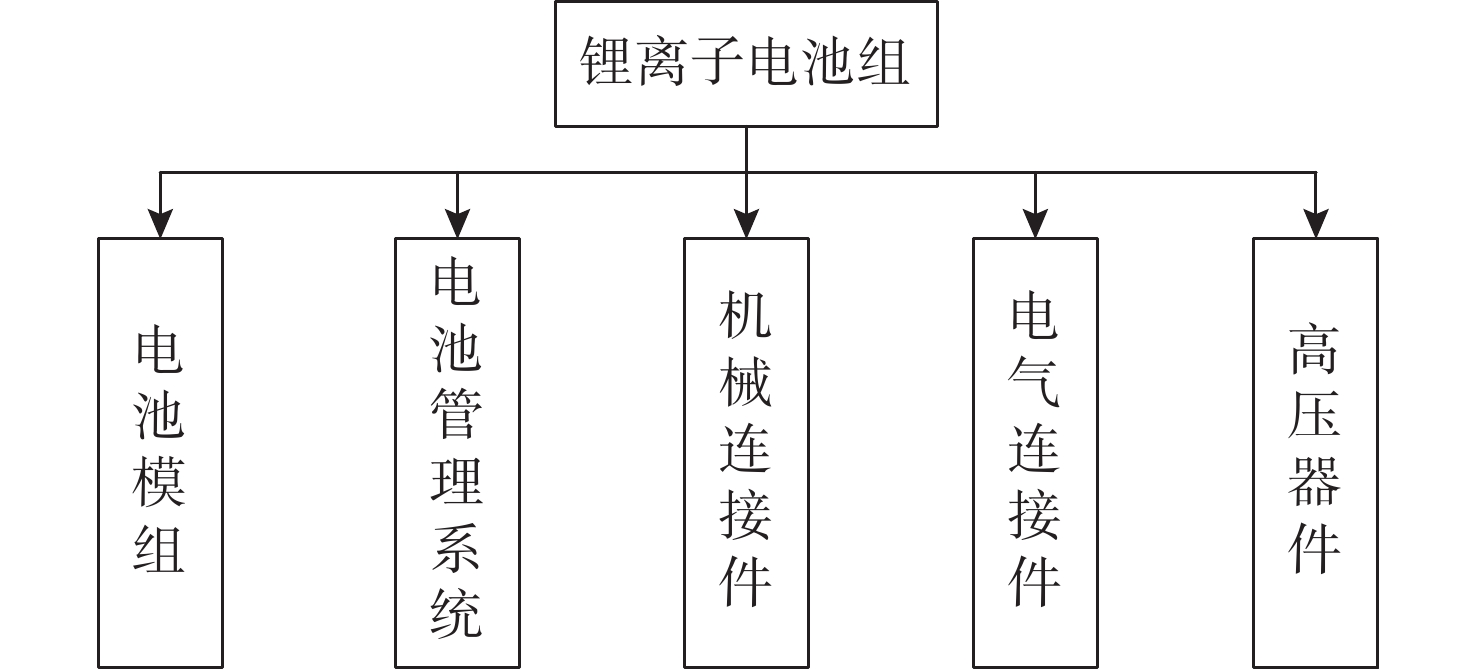
摘要: 电池组容量和可靠性直接影响着自主水下航行器(AUV)的航程、安全和总体性能。文中针对某AUV能源系统的技术指标, 基于模块化和双冗余设计思想, 选择21700锂离子电池作为单体电芯进行电池组设计, 单模块充分利用圆柱电池舱内部空间提高电池组容量, 多模块串并联的结构方便定位故障和进行维护, 2个电池组并联的方式使其具有更高的可靠性。试验结果显示其系统能量密度可达200 Wh/kg, 表明进行模块化设计的电池组具有较高的能量密度和可靠性, 提高了电池组的可维性。Abstract: For autonomous undersea vehicles(AUV), the capacity and reliability of battery packs depend on their range, safety, and overall performance. According to the technical specifications of the energy system of an AUV, the 21700 lithium-ion battery was selected as the unit cell for the battery pack design with the idea of a modular and double-redundant design. A single module can completely use the inner space of the cylindrical battery cabin to improve the capacity of the battery packs, while the structure of multiple modules in series and parallel is convenient for locating faults and carrying out maintenance. Two parallel battery packs can result improved reliability. The test results show that the energy density of the system can reach to 200 Wh/kg and battery packs in modular design have higher energy density, reliability, and maintainability.
-

图 7 动力电池模组与电池舱装配图
Figure 7. Assembly picture of power battery module in ba- ttery cabin
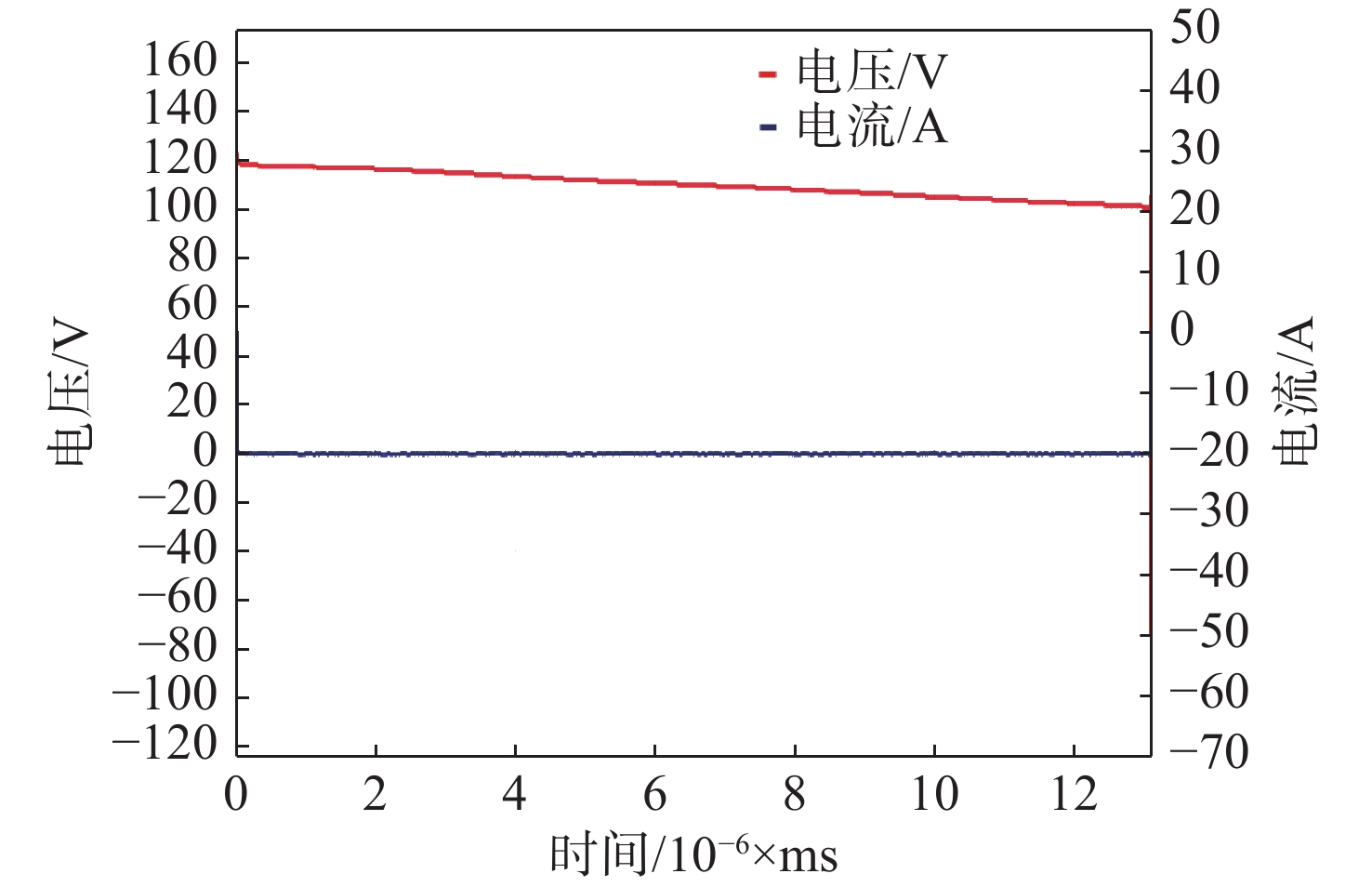
表 1 常温放电容量测试结果
Table 1. Test results of discharge capacity at room temperature
电池组
编号测试
编号放电容量
/Ah放电电量
/kWh平均电量
/kWh动力
电池11# 116.78 12.61 12.60 2# 116.69 12.60 3# 116.68 12.60 动力
电池21# 117.80 12.72 12.62 2# 116.23 12.55 3# 116.38 12.57 控制
电池11# 500.16 12.60 12.64 2# 501.35 12.63 3# 503.66 12.69 控制
电池21# 500.18 12.60 12.62 2# 501.73 12.64 3# 501.36 12.63  下载: 导出CSV
下载: 导出CSV
-
[1] 曹俊, 胡震, 刘涛, 等. 深海潜水器装备体系现状及发展分析[J]. 中国造船, 2020, 61(1): 204-218. doi: 10.3969/j.issn.1000-4882.2020.01.021Cao Jun, Hu Zhen, Liu Tao, et al. Current Situation and Development of Deep-sea Submersible Equipment[J]. Shipbuilding of China, 2020, 61(1): 204-218. doi: 10.3969/j.issn.1000-4882.2020.01.021 [2] 秦洪德, 孙延超. AUV关键技术与发展趋势[J]. 舰船科学技术, 2020, 42(12): 25-28. doi: 10.3404/j.issn.1672-7649.2020.12.005Qin Hong-de, Sun Yan-chao. Analysis of the Status and Development of Foreign AUV[J]. Ship Science and Technology, 2020, 42(12): 25-28. doi: 10.3404/j.issn.1672-7649.2020.12.005 [3] 孙长玺, 古浪, 胡中惠. 小型模块化AUV结构研究[C]//2019年水下无人系统技术高峰论坛. 青岛: 《水下无人系统学报》编辑部, 2019: 180-184. [4] 崔维成. “蛟龙”号载人潜水器关键技术研究与自主创新[J]. 船舶与海洋工程, 2011(1): 1-8. doi: 10.3969/j.issn.1005-9962.2011.01.001 [5] 王晓武, 林志民, 崔立军. 无人潜水器及其动力系统技术发展现状及趋势分析[J]. 舰船科学技术, 2009, 31(8): 31-34.Wang Xiao-wu, Lin Zhi-min, Cui Li-jun. Analysis of Technology Status and Development Trend for Unmanned Underwater Vehicle and its Propulsion System[J]. Ship Science and Technology, 2009, 31(8): 31-34. [6] 周德鑫, 任斌, 王晟. 国外水中装备用锂电池发展综述[J]. 电源技术, 2015, 139(4): 846-848. doi: 10.3969/j.issn.1002-087X.2015.04.077Zhou De-xin, Ren Bin, Wang Sheng. Review on Lithium Batteries for under Water Weapons[J]. Chinese Journal of Power Sources, 2015, 139(4): 846-848. doi: 10.3969/j.issn.1002-087X.2015.04.077 [7] Mcphail S. Autosub6000: a Deep Diving Long Range AUV[J]. Journal of Bionic Engineering, 2009, 6(1): 55-62. doi: 10.1016/S1672-6529(08)60095-5 [8] GómezIbáñez D, Taylor C L, Heintz M C, et al. Energy Management for the Nereus Hybrid Underwater Vehicle[C]//Oceans 2010. Sydney, Australia: IEEE, 2010: 1-9. [9] 宋德勇, 郑鹏, 何巍巍, 等. 基于21700锂离子电池的小型AUV模块化电池组设计[C]//2020年水下无人系统技术高峰论坛. 哈尔滨: 《水下无人系统学报》编辑部, 2020: 374-377. [10] 宋德勇, 杨申申, 何巍巍, 等. 载人潜水器锂离子电池及其管理系统的双冗余设计[J]. 自动化与仪表, 2019, 34(12): 1-4. doi: 10.19557/j.cnki.1001-9944.2019.12.001Song De-yong, Yang Shen-shen, He Wei-wei, et al. Double Redundancy Design of Lithium Ion Battery and its Management System for Manned Submersible[J]. Automation and Instrumentation, 2019, 34(12): 1-4. doi: 10.19557/j.cnki.1001-9944.2019.12.001 -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 895
- HTML全文浏览量: 685
- PDF下载量: 145
- 被引次数: 0
图(9) / 表(1)




