Thermodynamic Simulation Analysis of Variable Buoyancy Device for Underwater Gliders
-
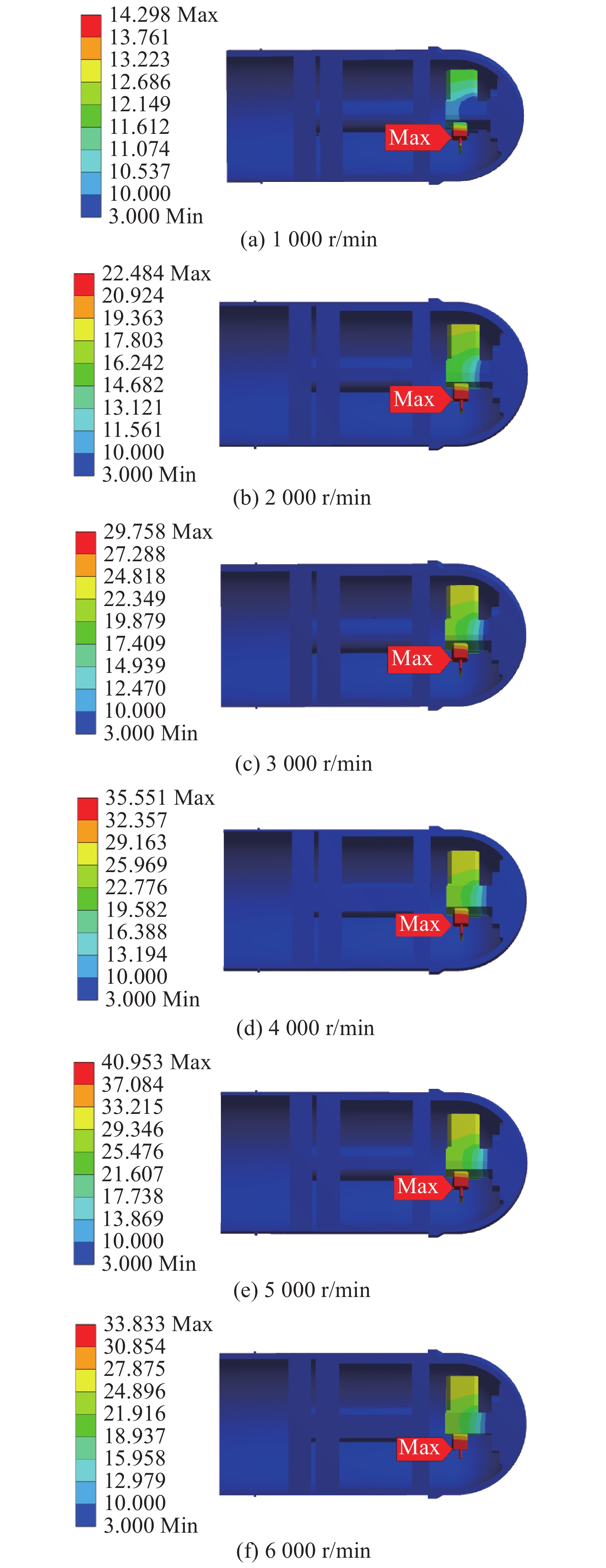
摘要: 水下滑翔机变浮力装置在工作时其驱动电机和泵产生的热量会对其内部结构产生影响, 导致装置无法正常运行。针对这一问题, 采用有限元方法, 建立了变浮力装置热力学仿真模型, 先对变浮力装置的活塞在理想匀速运动状态时在不同海水深度下到达热平衡时的温度场分布进行了仿真计算, 获得了变浮力装置的温度随海水深度的变化规律。结果表明: 在所选不同海水深度的工况中, 海水深度为500 m时温度最低, 在海面时温度最高; 在海面处和100 m海深时, 变浮力装置到达热平衡时的最高温度存在于右侧活塞上, 分别为31.49℃和26.90℃, 在所选其他海水深度的工况下装置到达热平衡时的最高温度均存在于泵模型的压盖上。文中同时对不同电机转速到达热平衡时的温度场分布进行了仿真, 获得了1 500 m海深下变浮力装置温度随电机转速的变化规律, 可知电机转速为5 000 r/min时, 装置到达热平衡时的温度最高, 为40.95℃, 存在于泵模型的压盖上。根据仿真结果获得了该装置运行时温度较高的位置, 为判别装置工作时由于温度过高而影响关键部件正常运行的可能性提供参考。Abstract: The heat generated by its driving motor and pump affects the internal structure of the device when a variable-buoyancy device on an underwater glider is operating, thus posing risks to its normal operation. To address this problem, the finite element method was used to establish a thermodynamic simulation model of the variable-buoyancy device. The temperature field distribution of the piston of the device in the ideal uniform motion state at the points where it reaches thermal equilibrium at different water depths was simulated. Moreover, the temperature characteristics of the variable buoyancy device change with water depth were obtained. The results show that among the selected working conditions with different water depths, the temperature reached its lowest at a water depth of 500 m and was highest at the sea surface. At the sea surface and depth of 100 m, the highest temperatures of the device at thermal equilibrium were found on the right piston, which were 31.49 and 26.90°C respectively. Under other working conditions, the highest temperatures of the device at thermal equilibrium were found in the gland of the pump model. Furthermore, the temperature field distribution of the variable buoyancy device at the points when it reaches thermal equilibrium at a depth of 1 500 m at different motor speeds was simulated, and the temperature characteristics of the variable buoyancy device changing with motor speed were obtained. The results show that among the selected working conditions with different motor speeds, the temperature of the device at thermal equilibrium reached its highest, which is 40.95℃, when the motor speed was 5 000 r/min and was found on the gland of the pump model. The simulation results indicate the high-temperature locations of the device during operation, thereby providing an important reference for analyzing whether key parts of the variable buoyancy device cannot operate properly because of overheating.
-

图 4 变浮力装置在不同海水深度下的温度场云图
Figure 4. Contours of temperature field of variable buoyancy device at different water depths
图 5 热平衡时各点温度随海水深度变化曲线
Figure 5. Curves of temperature at various points during thermal equilibrium changing with water depth

图 6 不同电机转速下装置到达热平衡时温度场云图
Figure 6. Contours of temperature field of the device at thermal equilibrium at different motor speeds
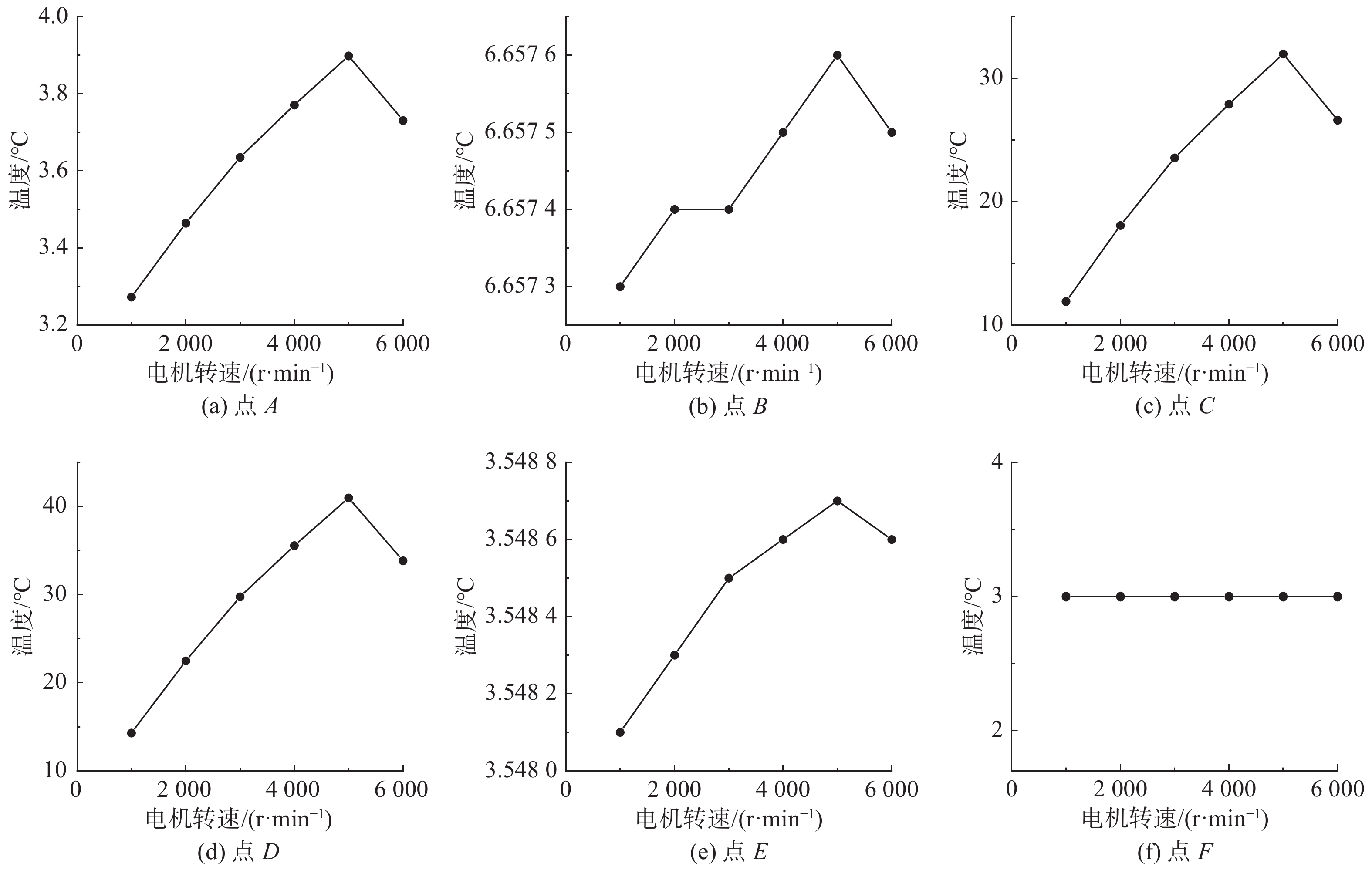
图 7 热平衡时各点温度随电机转速变化曲线
Figure 7. Curves of temperature at various points during thermal equilibrium changing with motor speed
表 1 海水温度与海水深度样本点
Table 1. Sample points of sea temperature and water depth
海水深度/m 海水温度/℃ 海水深度/m 海水温度/℃ 0 30 1 000 5 100 25 1 200 4 500 10 1 500 3  下载: 导出CSV
下载: 导出CSV
表 2 海水密度、压力与海水深度样本点
Table 2. Sample points of seawater density, pressure and water depth
海水深度
/m海水密度
/(kg·m−3)海水压力
/MPa0 1 021.00 0.10 100 1 023.48 1.00 500 1 031.71 5.06 1 000 1 034.59 10.14 1 200 1 035.54 12.18 1 500 1 037.04 15.24
下载: 导出CSV
表 3 海水深度对泵和电机生热率边界条件的影响
Table 3. Influence of water depth on the boundary conditions of heat generation rate of the pump and the motor
海水深度
/m泵输出功率
/kW泵输入功率
/kW泵发热量
/W泵生热率
/(W·mm−3)电机输出功率
/kW电机输入功率
/kW电机发热量
/W电机生热率
/(W·mm−3)0 0.016 7 0.017 0 0.340 1 1.26×10−6 0.018 7 0.019 1 0.381 8 1.43×10−7 100 0.166 7 0.170 1 3.401 4 1.26×10−5 0.187 1 0.190 9 3.817 9 1.43×10−6 500 0.843 3 0.860 5 17.210 9 6.36×10−5 0.946 6 0.965 9 19.318 3 7.24×10−6 1 000 1.690 0 1.724 5 34.489 8 1.28×10−4 1.896 9 1.935 7 38.713 0 1.45×10−5 1 200 2.030 0 2.071 4 41.428 6 1.53×10−4 2.278 6 2.325 1 46.501 5 1.74×10−5 1 500 2.540 0 2.591 8 51.836 7 1.92×10−4 2.851 0 2.909 2 58.184 1 2.18×10−5
下载: 导出CSV
表 4 电机转速对泵和电机生热率边界条件的影响
Table 4. Influence of motor speed on the boundary conditions of heat generation rate of the pump and the motor
转速
/(r·min−1)泵输出功率
/kW泵输入功率
/kW泵发热量
/W泵生热率
/(W·mm−3)电机扭矩
/(n·m)电机输出功率
/kW电机输入功率
/kW电机发热量
/W电机生热率
/(W·mm−3)1 000 0.895 5 0.913 8 18.275 1 6.80×10−5 9.599 1.005 1 1.025 6 20.512 9 7.70×10−6 2 000 2.236 1 2.281 8 45.635 4 1.69×10−4 11.985 2.509 9 2.561 2 51.223 4 1.92×10−5 3 000 2.855 5 2.913 8 58.275 1 2.15×10−4 10.203 3.205 1 3.270 5 65.410 8 2.45×10−5 4 000 4.214 8 4.300 8 86.016 2 3.18×10−4 11.295 4.730 9 4.827 4 96.548 8 3.62×10−5 5 000 4.722 8 4.819 1 96.382 7 3.56×10−4 10.125 5.301 0 5.409 2 108.184 6 4.06×10−5 6 000 3.656 2 3.730 8 74.615 9 2.76×10−4 6.532 4.103 9 4.187 6 83.752 5 3.14×10−5
下载: 导出CSV
-
[1] 方旭. 油囊式浮力调节装置的研制[D]. 武汉: 华中科技大学, 2012. [2] Sakagami N, Rahim A S B A, Ishikawa S. Preliminary Experiments of Dynamic Buoyancy Adjusting Device with an Assist Spring[M]//Information Technology Convergence. Springer, Dordrecht, 2013: 985-993. [3] 刘银水, 吴德发, 李东林, 等. 海水液压技术在深海装备中的应用[J]. 机械工程学报, 2014, 50(2): 28-35. doi: 10.3901/JME.2014.02.028Liu Yin-shui, Wu De-fa, Li Dong-lin, et al. Applications of Seawater Hydraulics in Deep-sea Equipment[J]. Journal of Mechanical Engineering, 2014, 50(2): 28-35. doi: 10.3901/JME.2014.02.028 [4] 武建国, 王雨, 郑荣. 基于浮力调节的液压系统动态特性仿真[J]. 海洋技术学报, 2014, 33(3): 6-11.Wu Jian-guo, Wang Yu, Zheng Rong. Simulation of the Dynamic Characteristics of the Hydraulic System Based on Variable Buoyancy System[J]. Journal of Ocean Technology, 2014, 33(3): 6-11. [5] 杨江涛. 浮标的双油囊浮力调节装置密封试验方法研究[J]. 科技创新与生产力, 2014(8): 104-106. doi: 10.3969/j.issn.1674-9146.2014.08.104Yang Jiang-tao. Study of the Seal Test Method of the Double Oil Tanks Buoyancy Adjusting Device Based on the Autonomous Profiling Floats[J]. Taiyuan Science and Technology, 2014(8): 104-106. doi: 10.3969/j.issn.1674-9146.2014.08.104 [6] Zheng R, Wang Y, Wu J G. AUV Buoyancy Regulating DeviceDesign and Simulation Analysis[J]. Applied Mechanics and Materials, 2013, 468: 150-157. doi: 10.4028/www.scientific.net/AMM.468.150 [7] 冀功祥, 邓小青, 王华明. 浮力调节装置的设计[J]. 科技创新与生产力, 2014(8): 102-103. doi: 10.3969/j.issn.1674-9146.2014.08.102Ji Gong-xiang, Deng Xiao-qing, Wang Hua-ming. An Instrument for Buoyancy Adapting[J]. Taiyuan Science and Technology, 2014(8): 102-103. doi: 10.3969/j.issn.1674-9146.2014.08.102 [8] 孙永见. 自主水下机器人模块化浮力调节技术研究[D]. 沈阳: 东北大学, 2015. [9] 牟蓬涛. 潜水器浮力调节机构PMSM驱动控制系统设计[D]. 北京: 北京工业大学, 2016. [10] 孙伟志, 谭华. 基于齿轮-滚珠丝杠传动的浮力调节装置的设计[J]. 机械传动, 2016, 40(10): 173-175. doi: 10.16578/j.issn.1004.2539.2016.10.036Sun Wei-zhi, Tan Hua. Design of Buoyancy Adjusting Device Based on the Gear-ball Screw Transmission[J]. Journal of Mechanical Transmission, 2016, 40(10): 173-175. doi: 10.16578/j.issn.1004.2539.2016.10.036 [11] 刘雁集, 马捷. 海洋水下滑翔机浮力调节系统的设计与实验[J]. 装备环境工程, 2018, 15(12): 45-49.Liu Yan-ji, Ma Jie. Design and Experiment of Buoyancy Regulating System for Underwater Glider[J]. Equipment Environmental Engineering, 2018, 15(12): 45-49. [12] 张安通, 徐令令, 王健, 等. 一种UUV智能应急安全控制自救系统设计[J]. 水下无人系统学报, 2019, 27(5): 548-554.Zhang An-tong, Xu Ling-ling, Wang Jian, et al. Design of an Intelligent Emergency Safety Control Self-rescue System for UUV[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 548-554. [13] 田冠枝, 苑利维, 宋显成, 等. 高精度UUV浮力调节装置控制驱动技术研究[J]. 舰船科学技术, 2019, 41(21): 108-111. doi: 10.3404/j.issn.1672-7649.2019.11.021Tian Guan-zhi, Yuan Li-wei, Song Xian-cheng, et al. Control and Drive Techniques for the High-precision Buoyancy Regulation Device of UUV[J]. Ship Science and Technology, 2019, 41(21): 108-111. doi: 10.3404/j.issn.1672-7649.2019.11.021 [14] 杨友胜, 任荷. 潜水器浮力调节技术发展现状与展望[J]. 中国海洋大学学报(自然科学版), 2019, 49(z1): 110-119. doi: 10.16441/j.cnki.hdxb.20180390Yang You-sheng, Ren He. Development Status and Prospect of Buoyancy Control Technology for Submersibles[J]. Periodical of Ocean University of China, 2019, 49(z1): 110-119. doi: 10.16441/j.cnki.hdxb.20180390 [15] 李登辉. 南海北部陆坡区水团分析[D]. 上海: 上海交通大学, 2017. [16] Xie X D, Wang Y H, Song Y, et al. Development, Optimization, and Evaluation of a Hybrid Passive Buoyancy Compensation System for Underwater Gliders[J]. Ocean Engineering, 2021, 242: 110115. doi: 10.1016/j.oceaneng.2021.110115 [17] Liang Y, Zhang L H, Wang Y H, et al. Dynamic-thermal Modeling and Motion Analysis for Deep-sea Glider with Passive Buoyancy Compensation Liquid[J]. Ocean Engineering, 2021, 238: 109704. doi: 10.1016/j.oceaneng.2021.109704 [18] 严升, 张润锋, 杨绍琼, 等. 水下滑翔机纵垂面变浮力过程建模与控制优化[J]. 中国机械工程, 2022, 33(1): 109-117. doi: 10.3969/j.issn.1004-132X.2022.01.012Yan Sheng, Zhang Run-feng, Yang Shao-qiong, et al. Modelling and Control Optimization for Underwater Gliders of Variable Buoyancy Processes in Vertical Plane[J]. China Mechanical Engineering, 2022, 33(1): 109-117. doi: 10.3969/j.issn.1004-132X.2022.01.012 -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 889
- HTML全文浏览量: 324
- PDF下载量: 95
- 被引次数: 0