Task Assignment Method for Multiple UUVs Based on Multi-population Genetic Algorithm
-
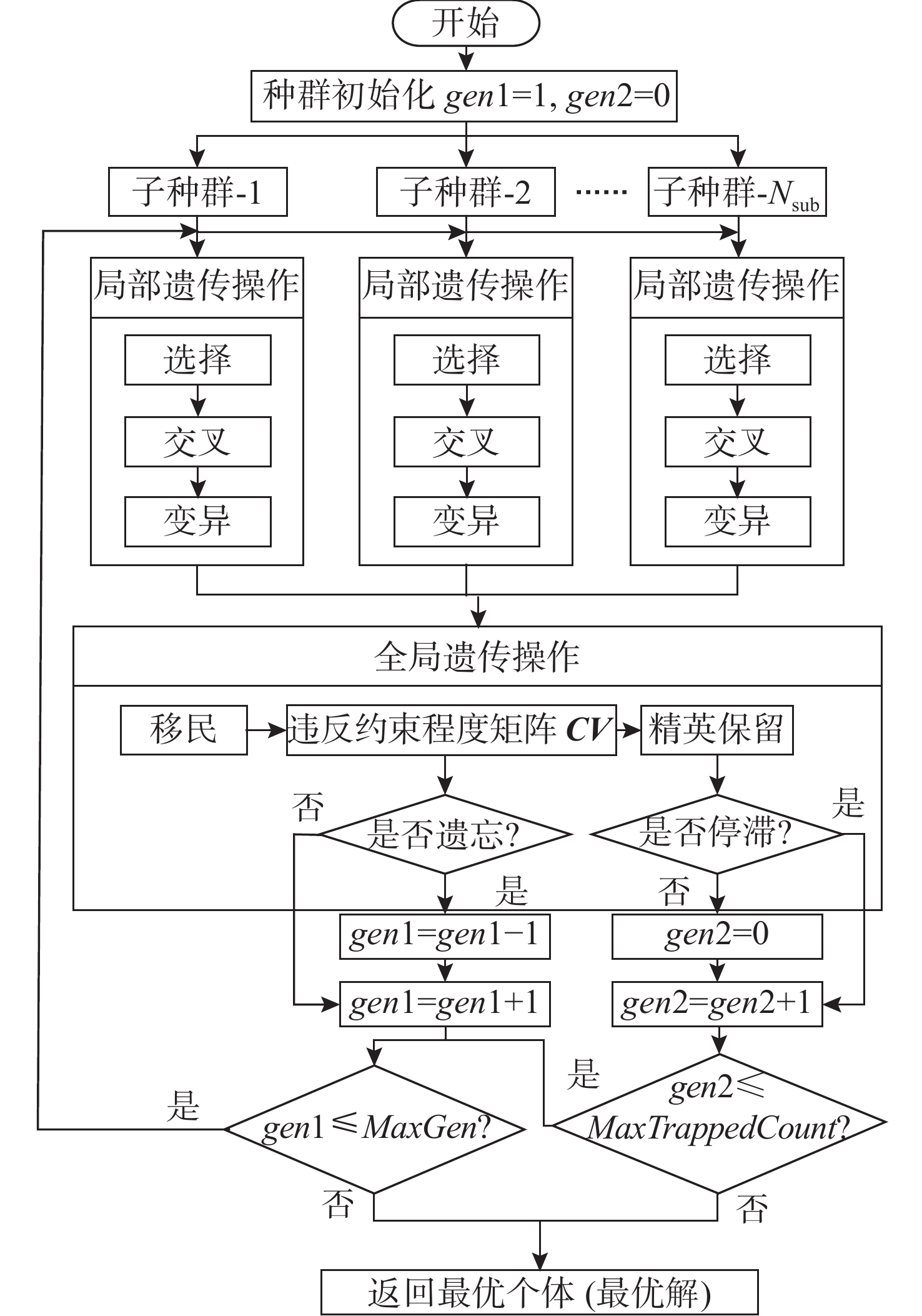
摘要: 多无人水下航行器(UUVs)协同侦察任务分配方案的优劣关系到作战效能甚至任务成败。文中针对传统遗传算法存在过早收敛、效率不高等问题, 提出一种人机融合的多种群遗传算法, 用于多基地、多目标、多约束的多UUV协同侦察任务分配。该算法通过引入多种群对解空间进行协同搜索, 可更好地平衡全局寻优和局部搜索能力, 突破经典遗传算法仅靠单种群进行寻优的性能瓶颈; 另外, 以人类先验知识作为启发信息辅助种群进行初始化, 提高算法收敛效率; 引入“遗忘策略”, 缓解可能出现的进化不完全问题。基于典型想定进行仿真实验, 结果表明, 提出的多种群遗传算法具有较强的鲁棒性和较高的寻优效率, 可以得到高品质的协同任务分配方案。Abstract: The quality of task assignment schemes for multiple unmanned undersea vehicles(UUVs) during cooperative reconnaissance is key to the operational effectiveness or even the success of missions. A multi-population genetic algorithm based on man-machine fusion was proposed for task allocation of multi-base, multi-target, and multi-constraint cooperative reconnaissance to solve the problems of premature convergence and low efficiency of traditional genetic algorithms. The algorithm can better balance global optimization and local search and break through the performance bottleneck of the classical genetic algorithm, which relies only on a single population for optimization, by introducing multiple populations to search the solution space cooperatively. In addition, human prior knowledge was used as heuristic information to assist population initialization in improving the convergence efficiency of the algorithm, and a forgetting strategy was introduced to alleviate possible incomplete evolution. The results of the simulation based on typical scenarios show that the proposed multi-population genetic algorithm is robust, has high optimization efficiency, and can generate high-quality collaborative task allocation schemes..
-
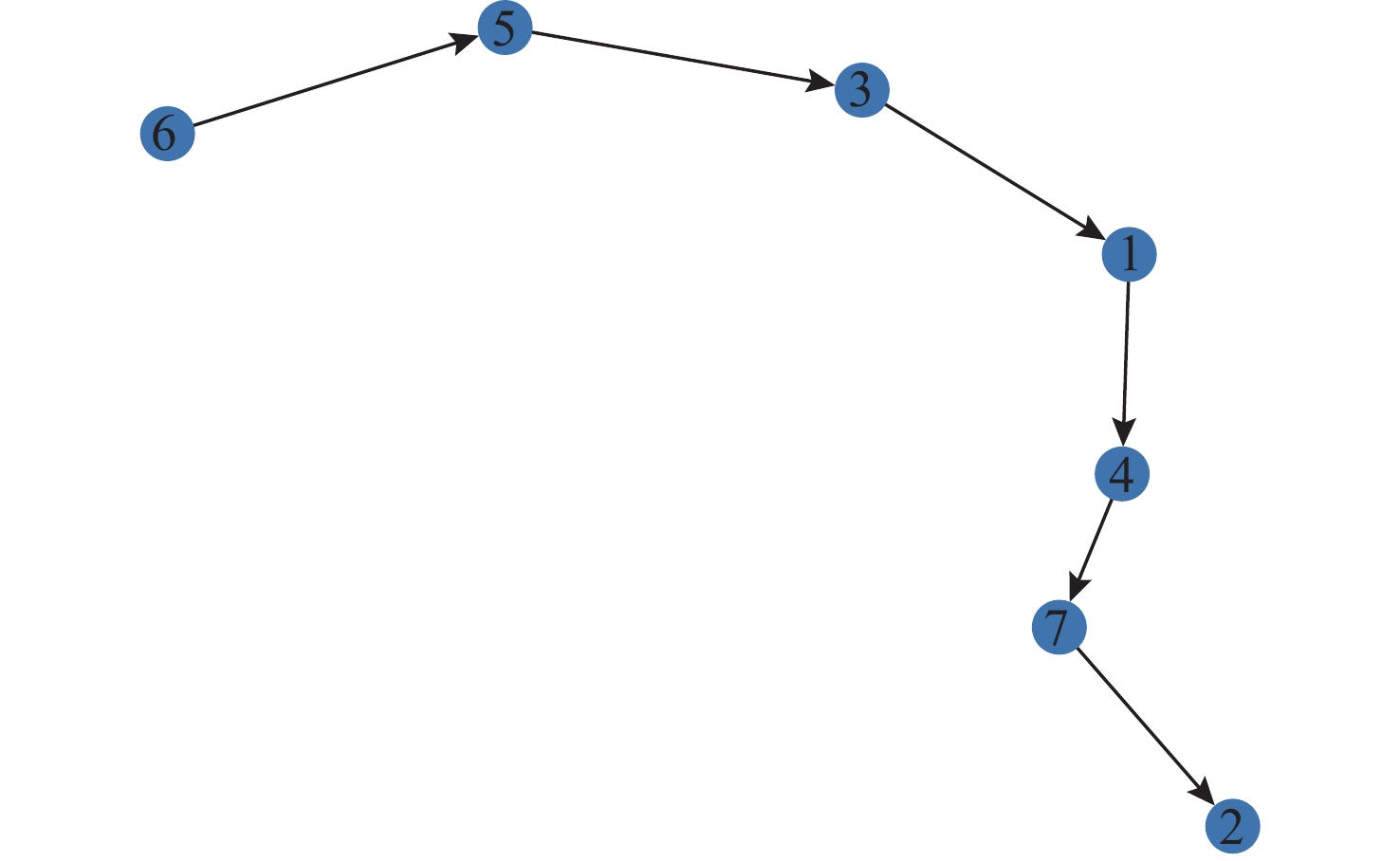
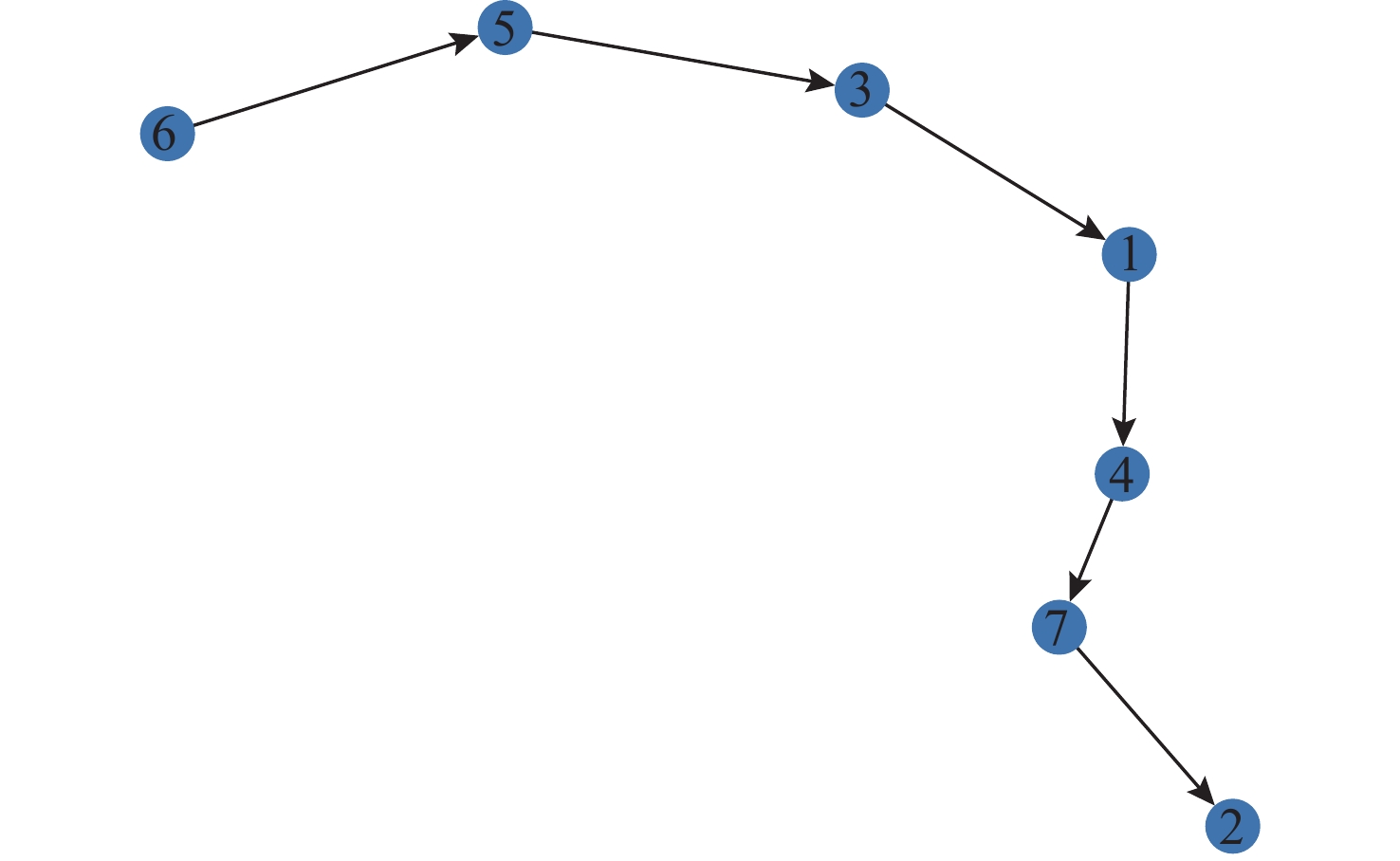
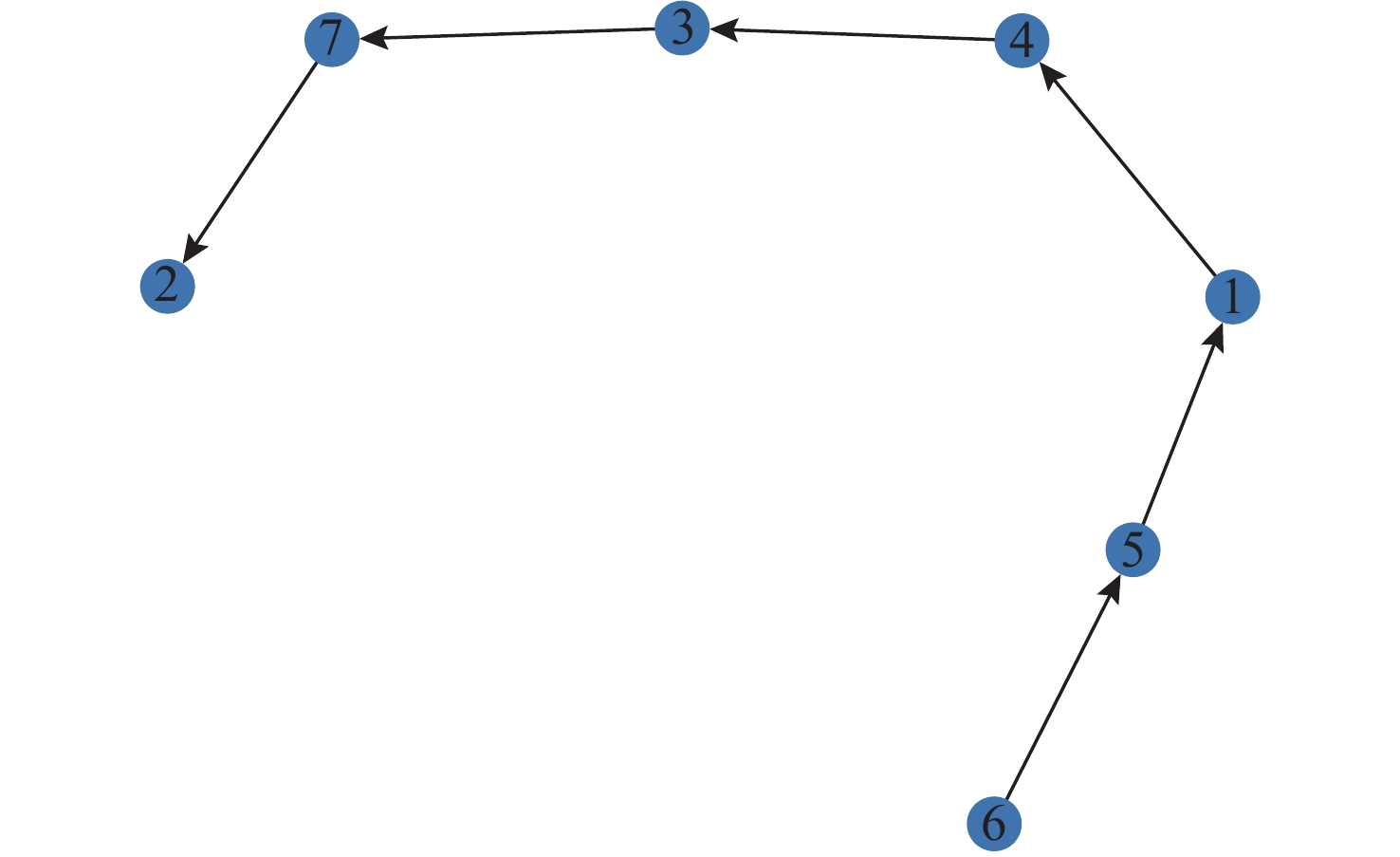
图 1 满足时序约束的可行解有向图
Figure 1. Directed graph of feasible solutions satisfying temporal constraints
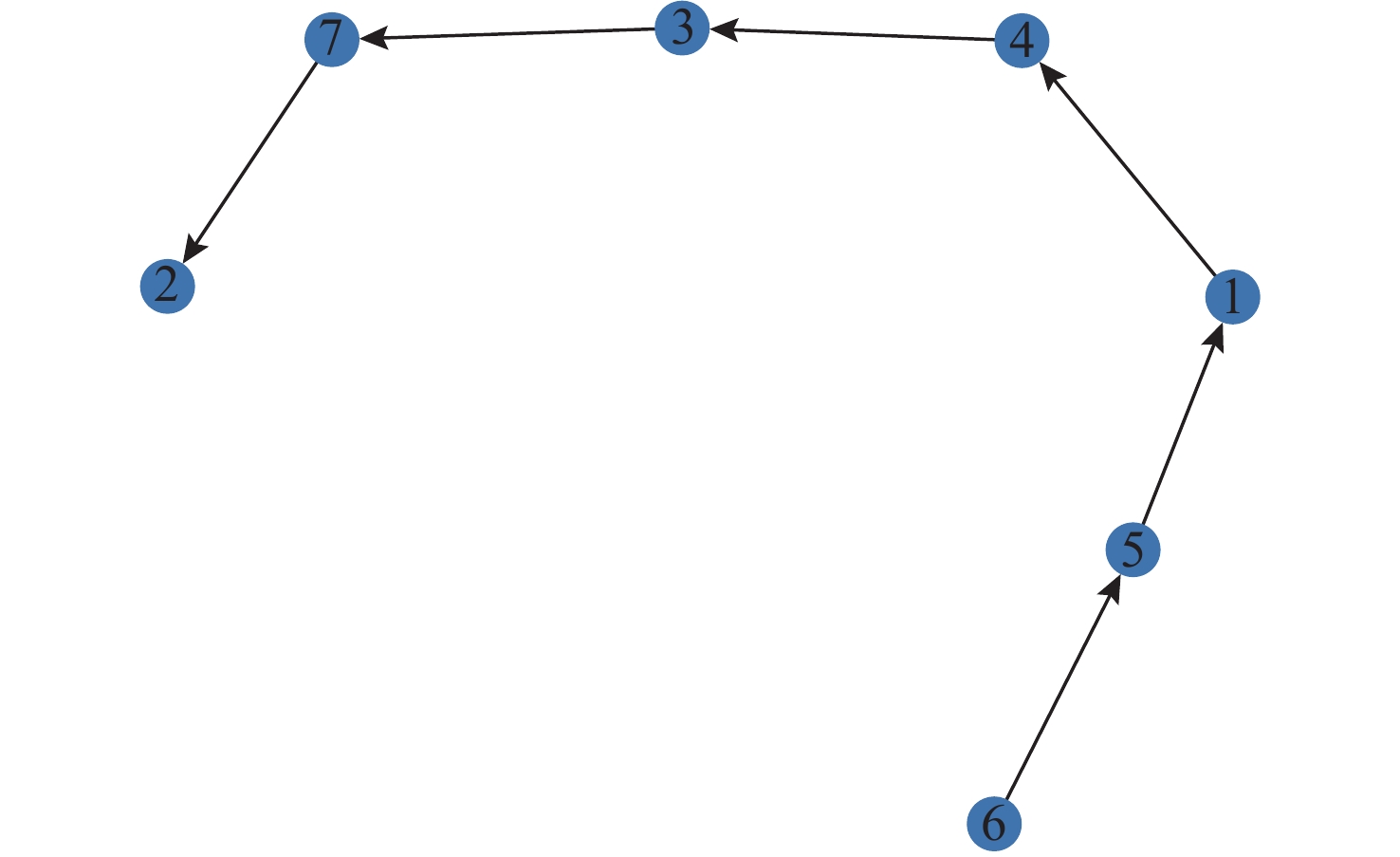
图 2 违反时序约束的非可行解有向图
Figure 2. Directed graph of infeasible solutions violating temporal constraints

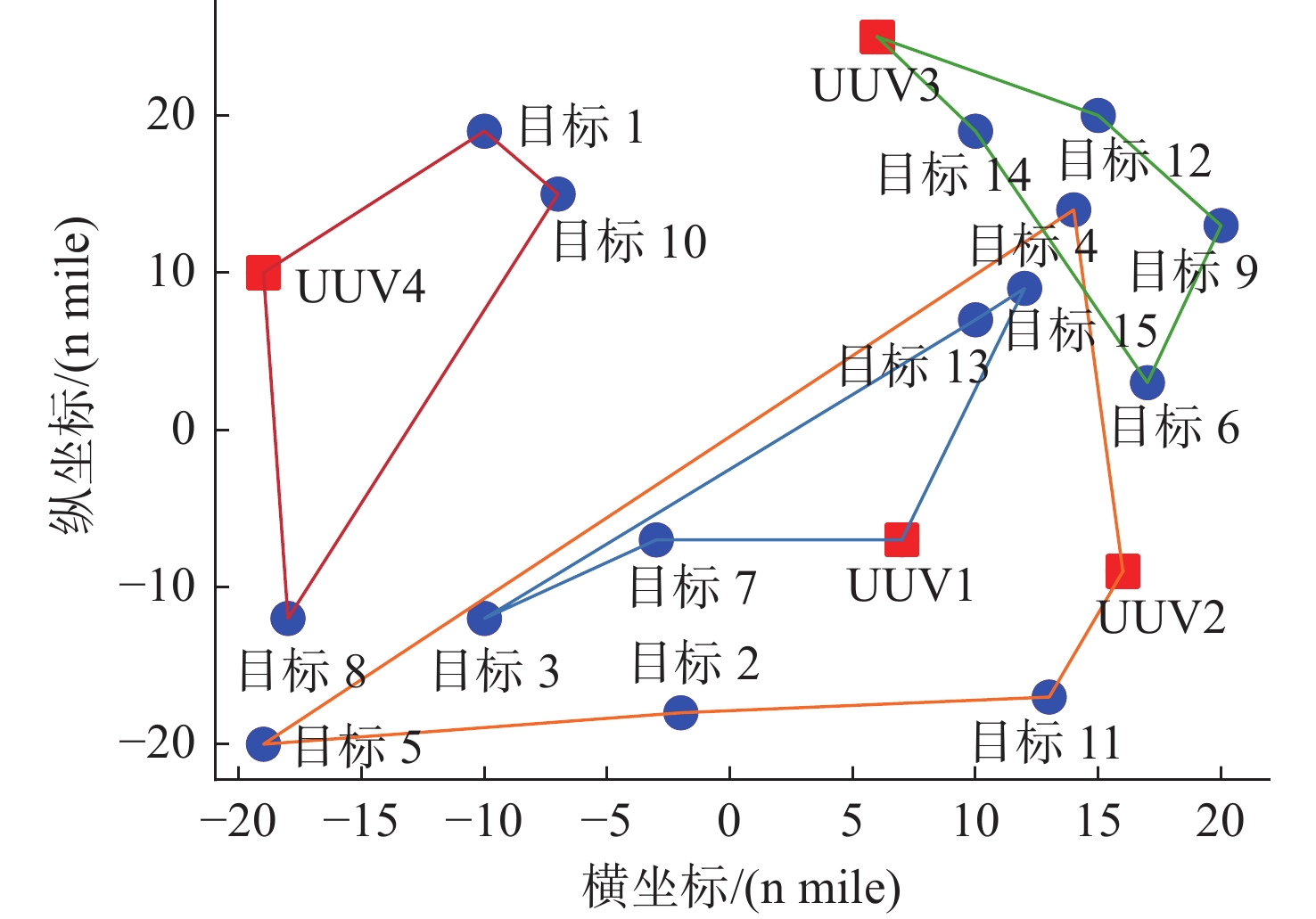
图 7 多种群协同进化算法任务分配结果示意图
Figure 7. Task assignment results of multi-population coevolution algorithm
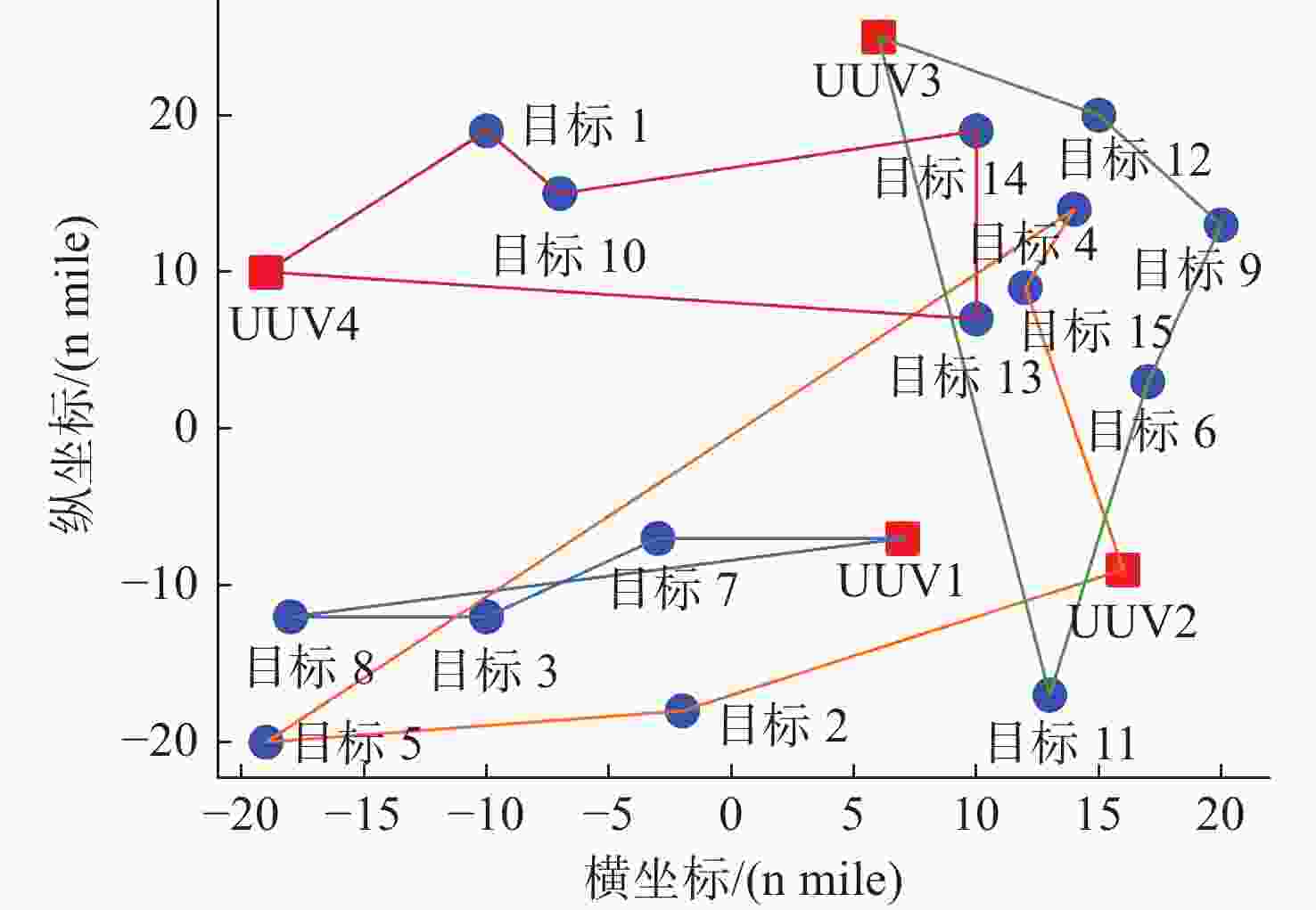
图 8 随机初始化多种群协同进化算法实验结果示意图
Figure 8. Experimental results of multi-population coevolution algorithm with random initialization
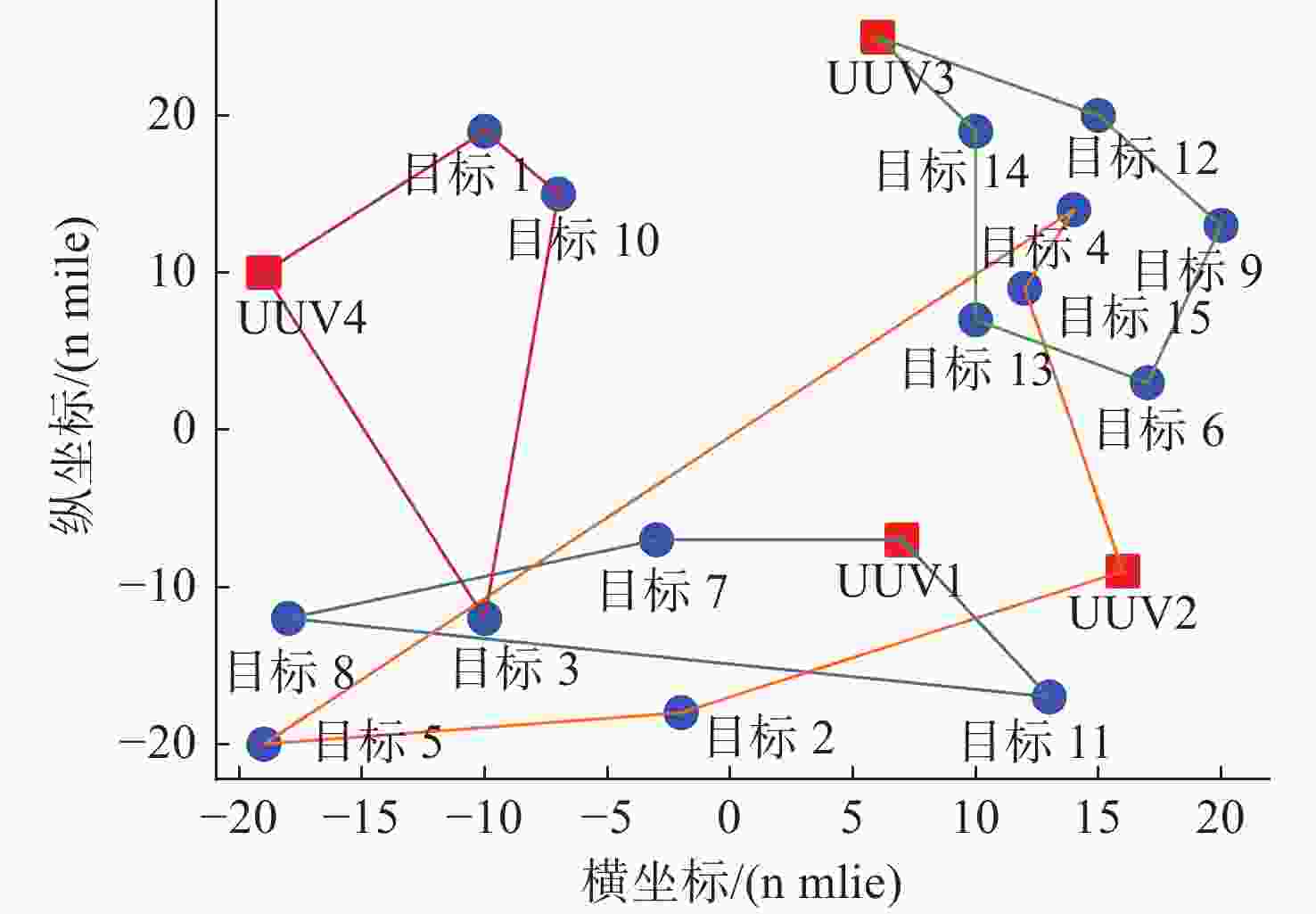
图 9 无遗忘策略多种群协同进化算法实验结果示意图
Figure 9. Experimental results of multi-population coevolution algorithm without forgetting strategy

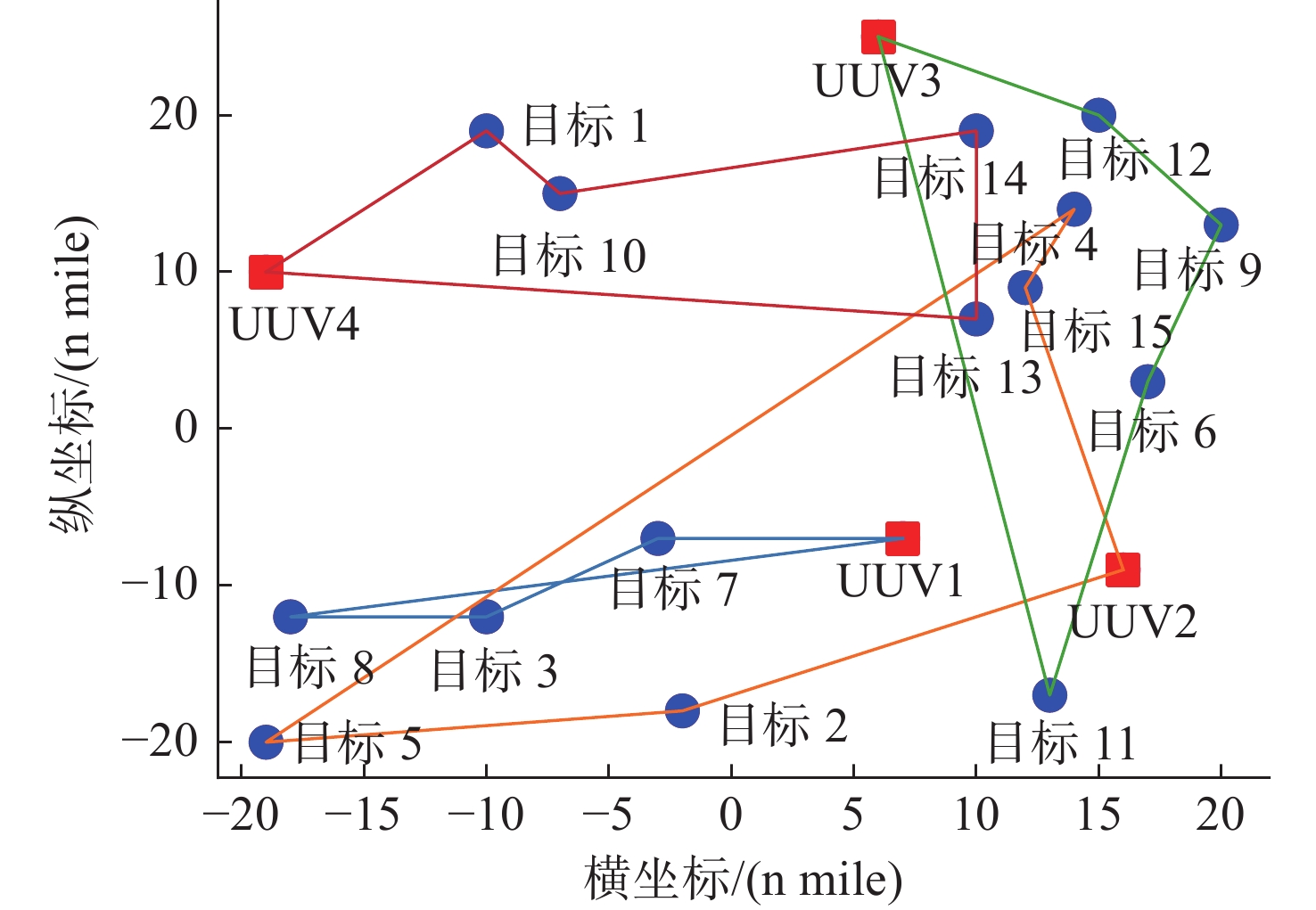
图 10 单种群遗传算法任务分配结果示意图
Figure 10. Task assignment results of single population genetic algorithm
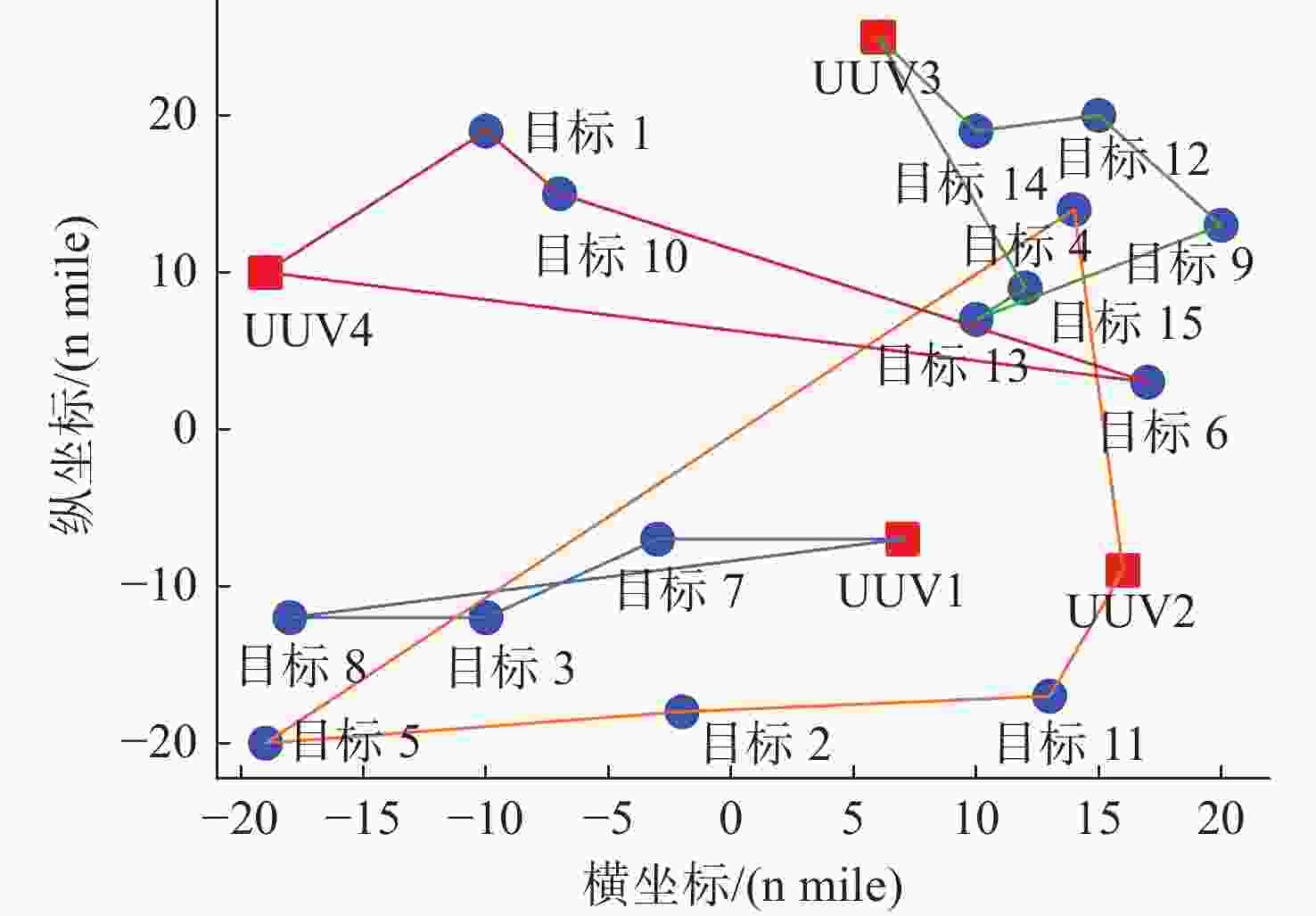
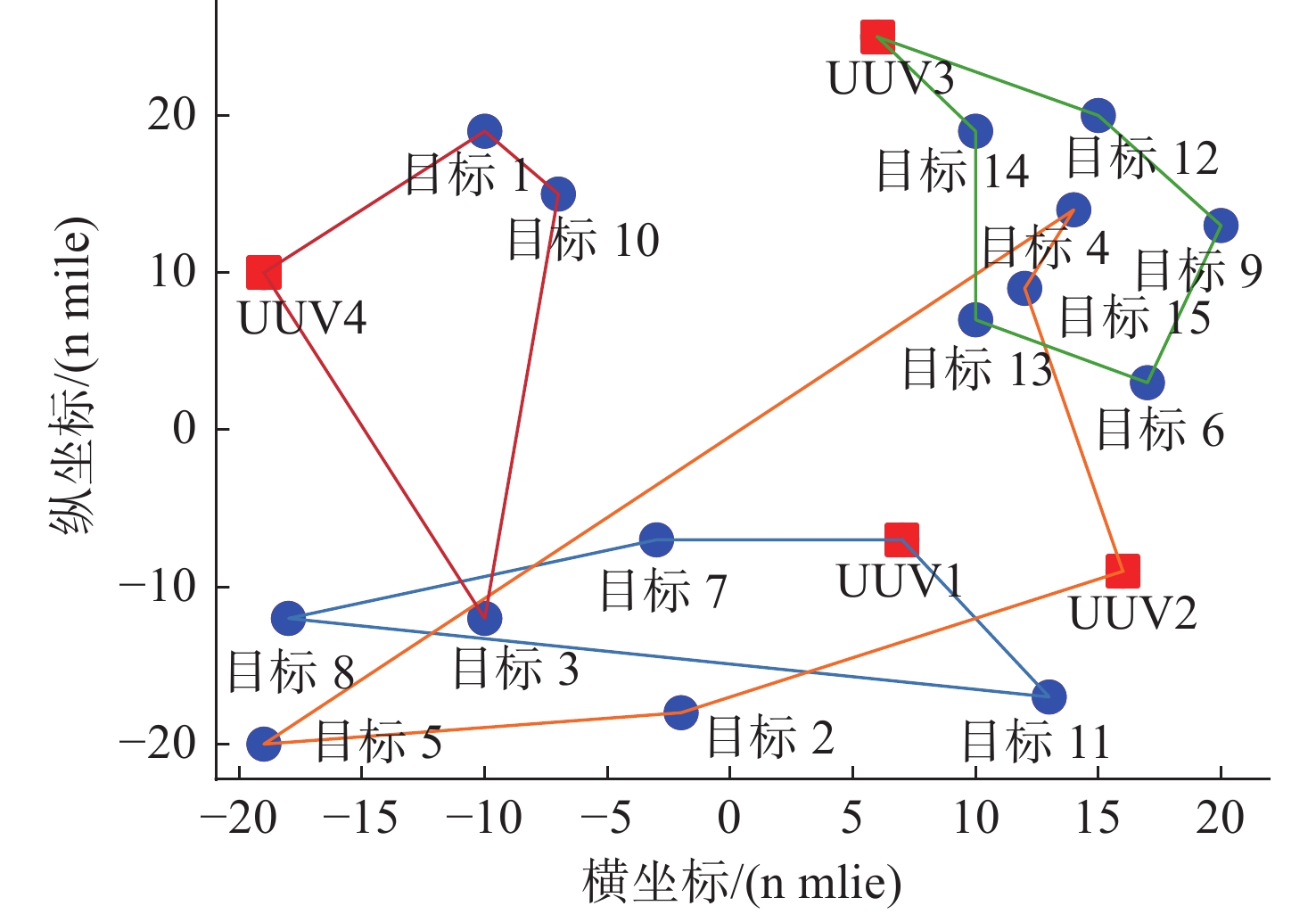
图 11 多种群协同进化算法任务分配结果示意图
Figure 11. Task assignment results of multi-population coevolution algorithm
表 1 任务收益矩阵
Table 1. Task benefit matrix
UUV 目标 1 2 3 4 5 6 7 8 1 7 9 15 11 12 11 15 5 2 7 9 13 10 13 7 14 13 3 15 13 10 5 12 8 11 11 4 8 7 15 7 5 9 8 11 UUV 目标 9 10 11 12 13 14 15 1 10 × 6 13 13 × 10 2 9 11 15 7 15 5 6 3 14 6 7 7 6 11 10 4 14 15 13 14 15 12 5  下载: 导出CSV
下载: 导出CSV
表 2 多种群协同进化算法各UUV任务信息表
Table 2. Information table of UUV tasks for multiple population coevolution algorithm
UUV
编号任务
收益航行距离
/(n mile)完成时间
/min任务
个数1 35 65.78 2 306.05 4 2 35 111.16 2 077.41 4 3 48 54.01 2 006.8 4 4 21 68.91 1 776.93 3 合计 139 299.86 8167.19 15
下载: 导出CSV
表 3 随机初始化多种群协同进化算法信息表
Table 3. Information table for multi-population coevolution algorithm with random initialization
UUV
编号任务
收益航行距离
/(n mile)完成时间
/min任务
个数1 21 52.10 1 311.62 3 2 46 108.45 2 585.34 4 3 51 92.31 2 438.96 4 4 41 76.35 2 302.25 4 合计 159 329.21 8 638.17 15
下载: 导出CSV
表 4 无遗忘策略多种群协同进化算法信息表
Table 4. Information table for multi-population coevolution algorithm without forgetting strategy
UUV
编号任务
收益航行距离
/(n mile)完成时间
/min任务
个数1 32 68.87 1 969.77 3 2 47 108.45 2 585.34 4 3 55 56.61 2 371.04 5 4 37 68.66 2 413.66 3 合计 171 302.60 9 339.81 15
下载: 导出CSV
表 5 单种群遗传算法各UUV任务信息表
Table 5. Information table of UUV tasks for single population genetic algorithm
UUV
编号任务
收益航行距离
/(n mile)完成时间
/min任务
个数1 20 52.10 1 311.62 3 2 49 108.45 2 585.34 4 3 49 92.29 2 398.75 4 4 44 83.37 2 534.01 4 合计 162 336.21 8829.72 15
下载: 导出CSV
-
[1] 严浙平, 刘祥玲. 多UUV协调控制技术研究现状及发展趋势[J]. 水下无人系统学报, 2019, 27(3): 226-231. doi: 10.11993/j.issn.2096-3920.2019.03.001Yan Zhe-ping, Liu Xiang-ling. Research Status and Development Trend of Multi-UUV Coordinated Control Technology: A Review[J]. Journal of Unmanned Undersea Systems, 2019, 27(3): 226-231. doi: 10.11993/j.issn.2096-3920.2019.03.001 [2] 董晓明, 范慧丽, 龚俊斌, 等. 海上无人装备体系概览[M]. 哈尔滨: 哈尔滨工程大学出版社, 2020: 460-473. [3] 轩孟丽. 无人机编队的任务规划[D]. 西安: 西安电子科技大学, 2020. [4] 叶航航, 李泽仁, 刘浩, 等. 一种基于指派模型的导弹-目标分配算法[C]//2018中国自动化大会(CAC2018)论文集. 西安: 中国自动化学会, 2018: 564-569. [5] 孙凡, 邹强, 彭英武. 基于GA的水下预置反舰导弹区域封锁部署优化[J]. 水下无人系统学报, 2021, 29(2): 238-242.Sun Fan, Zou Qiang, Peng Ying-wu. Optimization of Regional Blockade Deployment of Underwater Preset Anti-ship Missiles Based on GA[J]. Journal of Unmanned Undersea Systems, 2021, 29(2): 238-242. [6] 董浩, 李烨. 基于多种群遗传算法的虚拟机优化部署研究[J]. 控制工程, 2020, 182(2): 131-137. doi: 10.14107/j.cnki.kzgc.170671Dong Hao, Li Ye. Research on Optimization of Virtual Machine Deployment Based on Multi Population Genetic Algorithm[J]. Control Engineering of China, 2020, 182(2): 131-137. doi: 10.14107/j.cnki.kzgc.170671 [7] 刘胜, 于海强. 基于改进遗传算法的多目标FJSP问题研究[J]. 控制工程, 2016, 23(6): 816-822. doi: 10.14107/j.cnki.kzgc.150184Liu Sheng, Yu Hai-qiang. Research on Multi-objective FJSP Problem Based on Improved Genetic Algorithm[J]. Control Engineering of China, 2016, 23(6): 816-822. doi: 10.14107/j.cnki.kzgc.150184 [8] Bai X, Yan W, Ge S S, et al. An Integrated Multi-population Genetic Algorithm for Multi-vehicle Task Assignment in a Drift Field[J]. Information Sciences, 2018, 44(4): 1-29. [9] 陈娟, 荆昊, 方宇杰. 基于多种群协同进化算法的混合交通流信号优化[J]. 上海大学学报(自然科学版), 2020, 156(6): 153-166.Chen Juan, Jing Hao, Fang Yu-jie. Mixed Traffic Flow Signal Optimization Based on Multi-population Coevolutionary Algorithm[J]. Journal of Shanghai University (Natural Science), 2020, 156(6): 153-166. [10] 张习习, 顾幸生. 基于集成学习概率神经网络的电机轴承故障诊断[J]. 华东理工大学学报(自然科学版), 2020, 46(1): 77-85. doi: 10.14135/j.cnki.1006-3080.20181206001Zhang Xi-xi, Gu Xing-sheng. Motor Bearing Fault Diagnosis Method Based on Integrated Learning Probabilistic Neural Network[J]. Journal of East China University of Science and Technology, 2020, 46(1): 77-85. doi: 10.14135/j.cnki.1006-3080.20181206001 [11] 焦儒旺, 曾三友, 李晰, 等. 基于学习的动态多目标方法求解约束优化问题[J]. 武汉大学学报(理学版), 2017, 63(2): 177-183. doi: 10.14188/j.1671-8836.2017.02.012Jiao Ru-wang, Zeng San-you, Li Xi, et al. Constrained Optimization by Solving Equivalent Dynamic Constrained Multi-Objective Based on Learning[J]. Journal of Wuhan University (Natural Science Edition), 2017, 63(2): 177-183. doi: 10.14188/j.1671-8836.2017.02.012 [12] Jazzbin, Yuan Q X. Geatpy: the Genetic and Evolutionary Algorithm Toolbox for Python with High Performance in python[EB/OL].(2021-04-04)[2021-07-02]. http://www.geatpy.com/. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 997
- HTML全文浏览量: 370
- PDF下载量: 150
- 被引次数: 0