- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
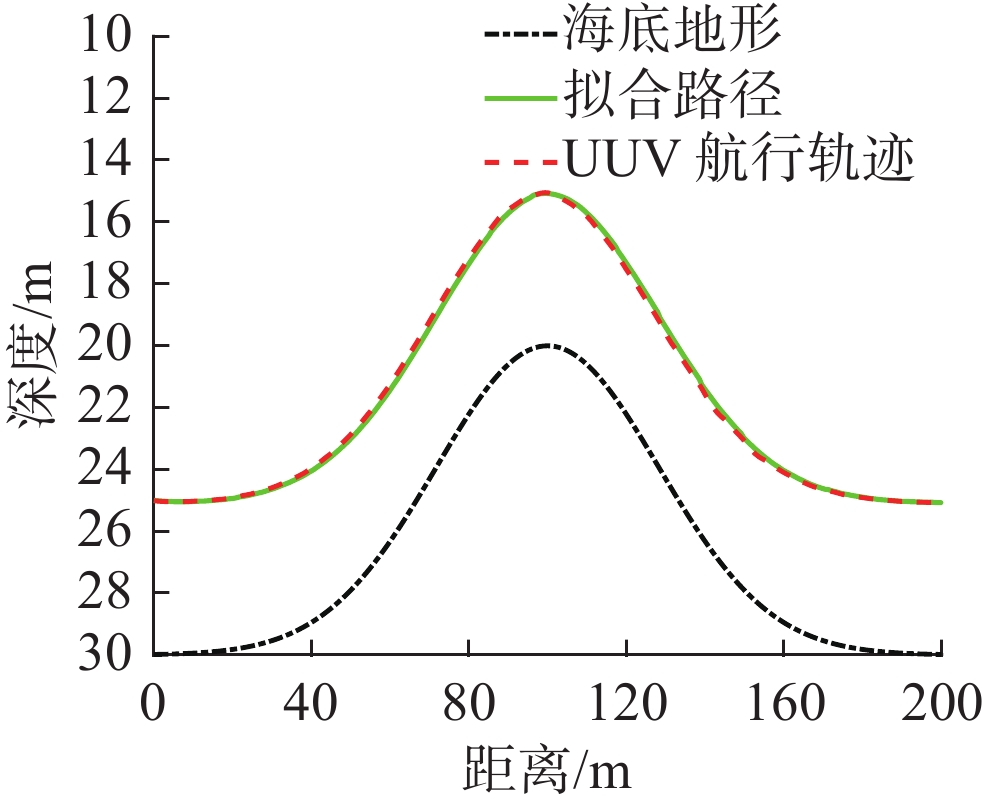
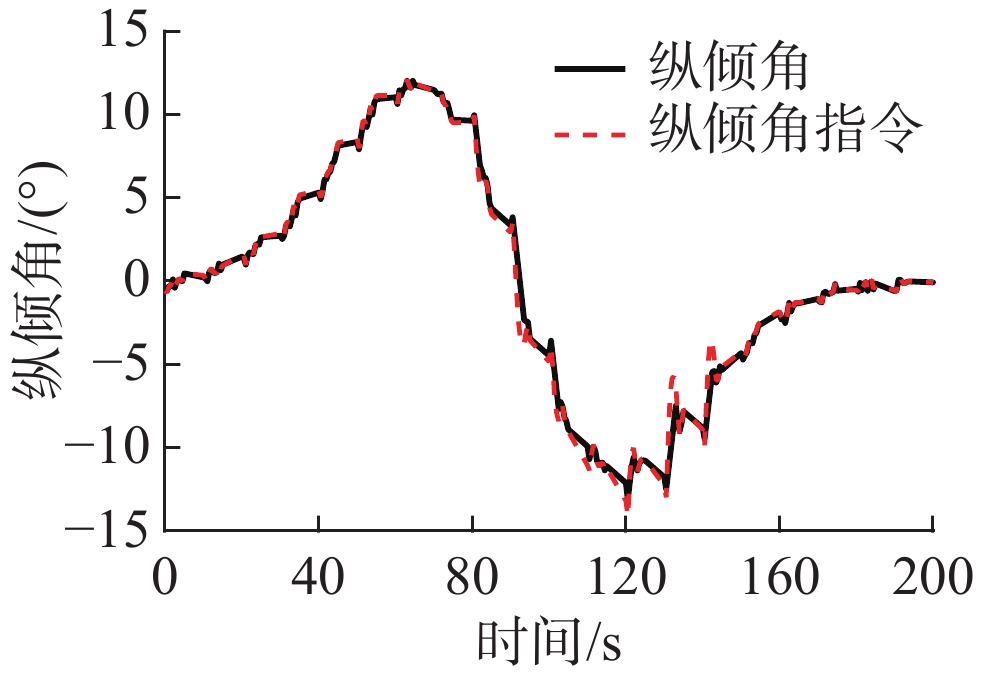
| Citation: | CHEN Tao, WAN Shou. Dynamic Path Generation Method for UUV Terrain Tracking Using Forward-Looking Sonar and Altimetry Sonar[J]. Journal of Unmanned Undersea Systems, 2024, 32(2): 304-310. doi: 10.11993/j.issn.2096-3920.2023-0047

|

| [1] |
钱东, 赵江, 杨芸. 军用UUV发展方向与趋势(上)——美军用无人系统发展规划分析解读[J]. 水下无人系统学报, 2017, 25(2): 1-30.
Qian Dong, Zhao Jiang, Yang Yun. Development trend of military UUV(Ⅰ): A review of U.S. military unmanned system development plan[J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 1-30.
|
| [2] |
Silvestre C, Cunha R, Paulino N, et al. A bottom-following preview controller for autonomous underwater vehicles[J]. IEEE Transactions on Control Systems Technology, 2008, 17(2): 257-266.
|
| [3] |
Melo J, Matos A. Bottom estimation and following with the MARES AUV[C]//2012 Oceans. Hampton Roads, VA, USA: IEEE, 2012: 1-8.
|
| [4] |
Adhamimirhosseini A, Yazdanpanah M J, Aguiar A P. Automatic bottom-following for underwater robotic vehicles[J]. Automatica, 2014, 50(8): 2155-2162. doi: 10.1016/j.automatica.2014.06.003
|
| [5] |
Kim K, Ura T. Terrain-adaptive optimal guidance for near-bottom survey by an autonomous underwater vehicle[C]//2013 IEEE International Underwater Technology Symposium. Tokyo, Japan: IEEE, 2013.
|
| [6] |
徐红丽, 陈巩. 基于传感器信息的AUV海底地形跟踪研究[J]. 自动化与仪表, 2016, 31(6): 5-9.
Xu Hongli, Chen Gong. Autonomous underwater vehicle undersea bottom-following based on sensor information[J]. Automation & Instrumentation, 2016, 31(6): 5-9.
|
| [7] |
李岳明, 万磊, 孙玉山, 等. 水下机器人高度信息融合与欠驱动地形跟踪控制[J]. 控制理论与应用, 2013, 30(1): 118-122.
Li Yueming, Wan Lei, Sun Yushan, et al. Altitude information fusion and bottom-following control for underactuated autonomous underwater vehicle[J]. Control Theory & Applications, 2013, 30(1): 118-122.
|
| [8] |
周易. UUV地形跟踪安全性评估及航行模式切换控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2017.
|
| [9] |
夏正亚, 洪亮. 基于多项式拟合插值函数的码垛机器人轨迹规划[J]. 山东科学, 2016, 29(5): 117-123.
|
| [10] |
李践飞, 周智勇, 牛玉杰. 潜艇垂直面运动标准化仿真模型研究[J]. 船电技术, 2009, 29(3): 53-56.
|
| [11] |
瞿佳伟, 张春雷, 张冀. 基于NSGA-Ⅱ和最小二乘原理的加工轨迹拟合算法[J]. 精密制造与自动化, 2019(2): 25-28, 52.
|
| [12] |
姚连璧, 钱瑾斐. 基于移动最小二乘法的轨迹拟合切线方位角计算[J]. 同济大学学报(自然科学版), 2018, 46(11): 1589-1593.
|

Figures(9)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: