- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
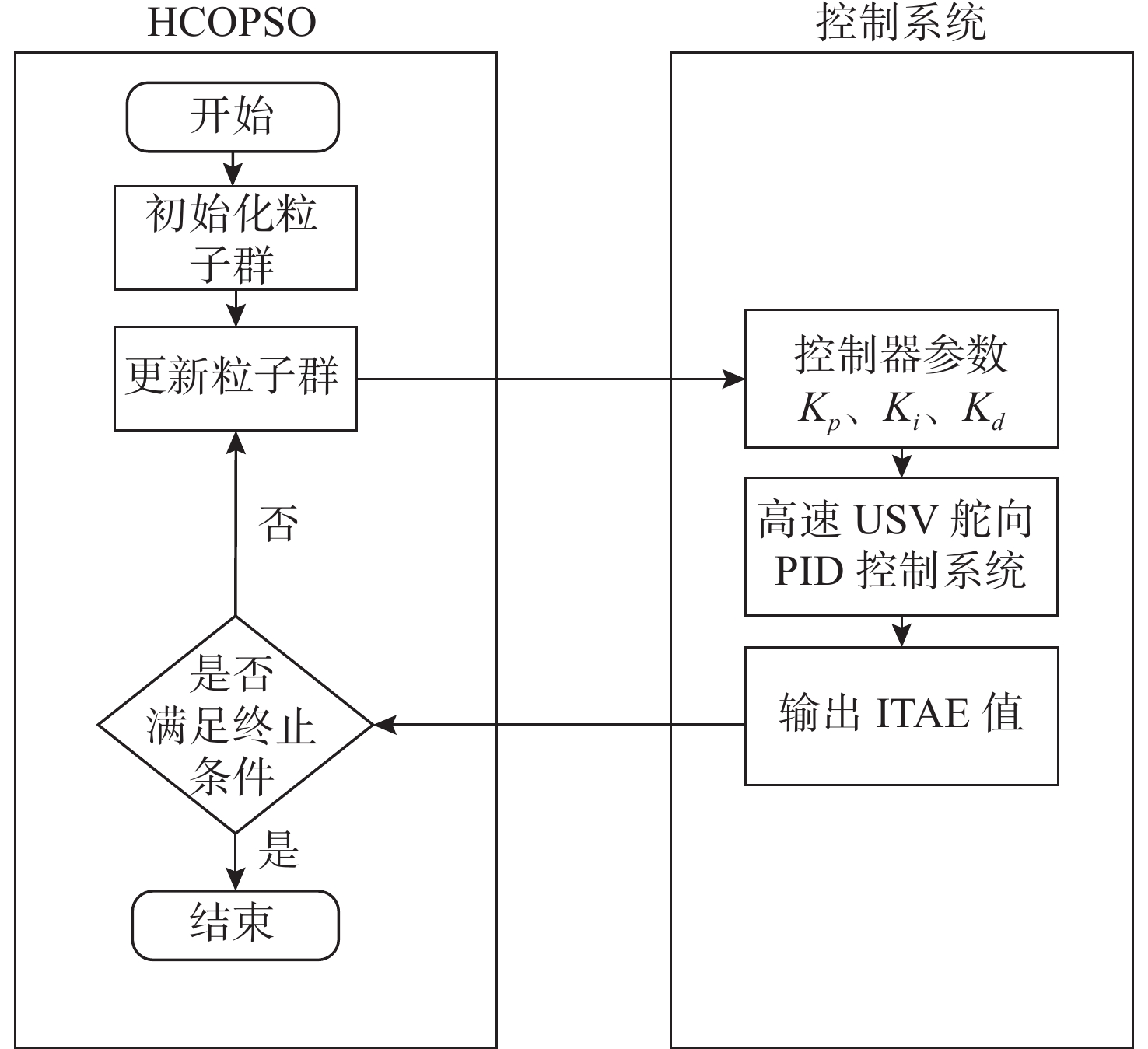
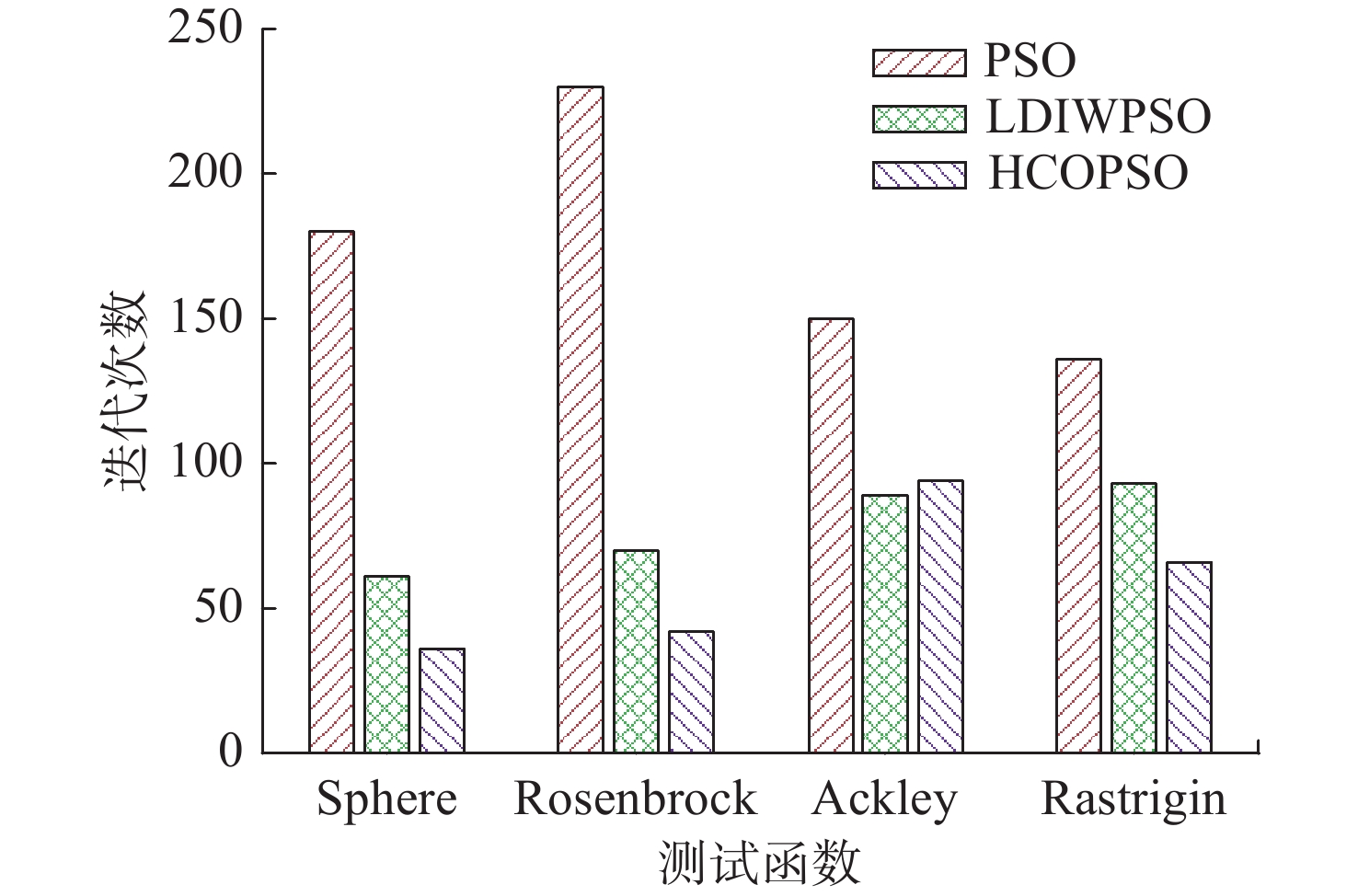
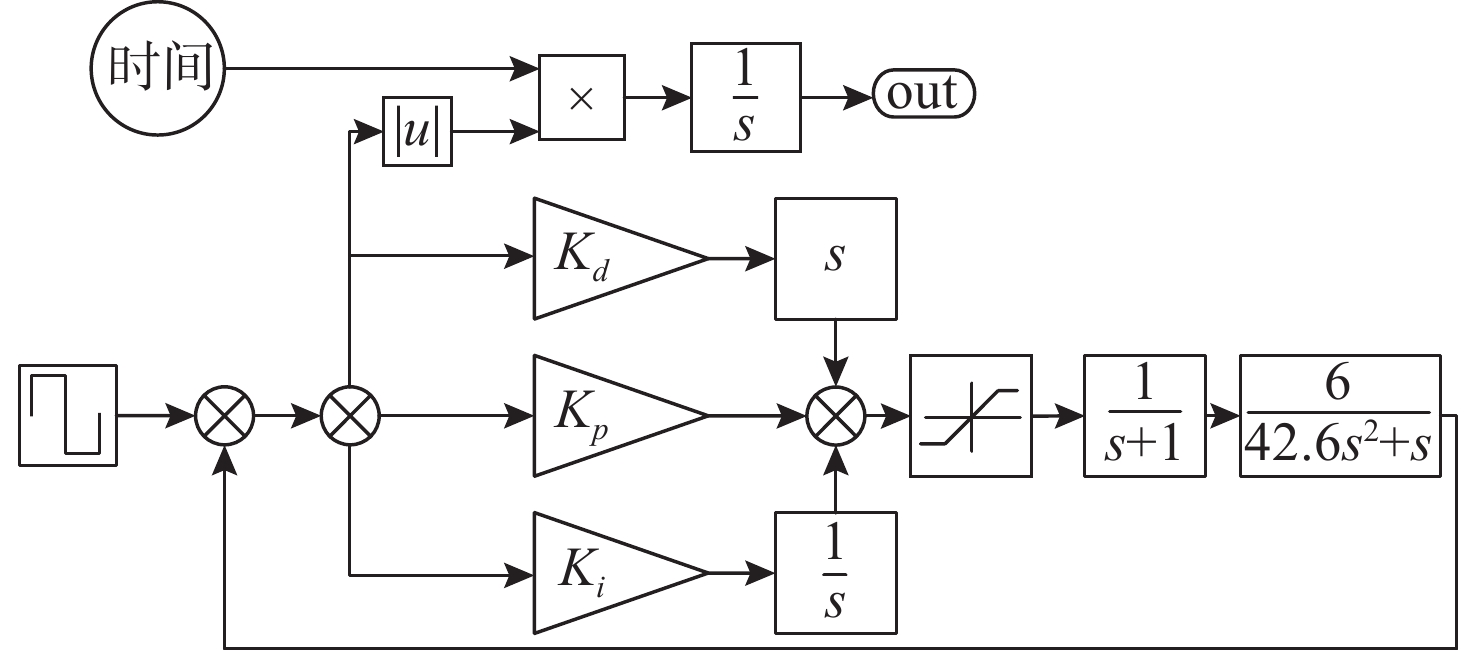
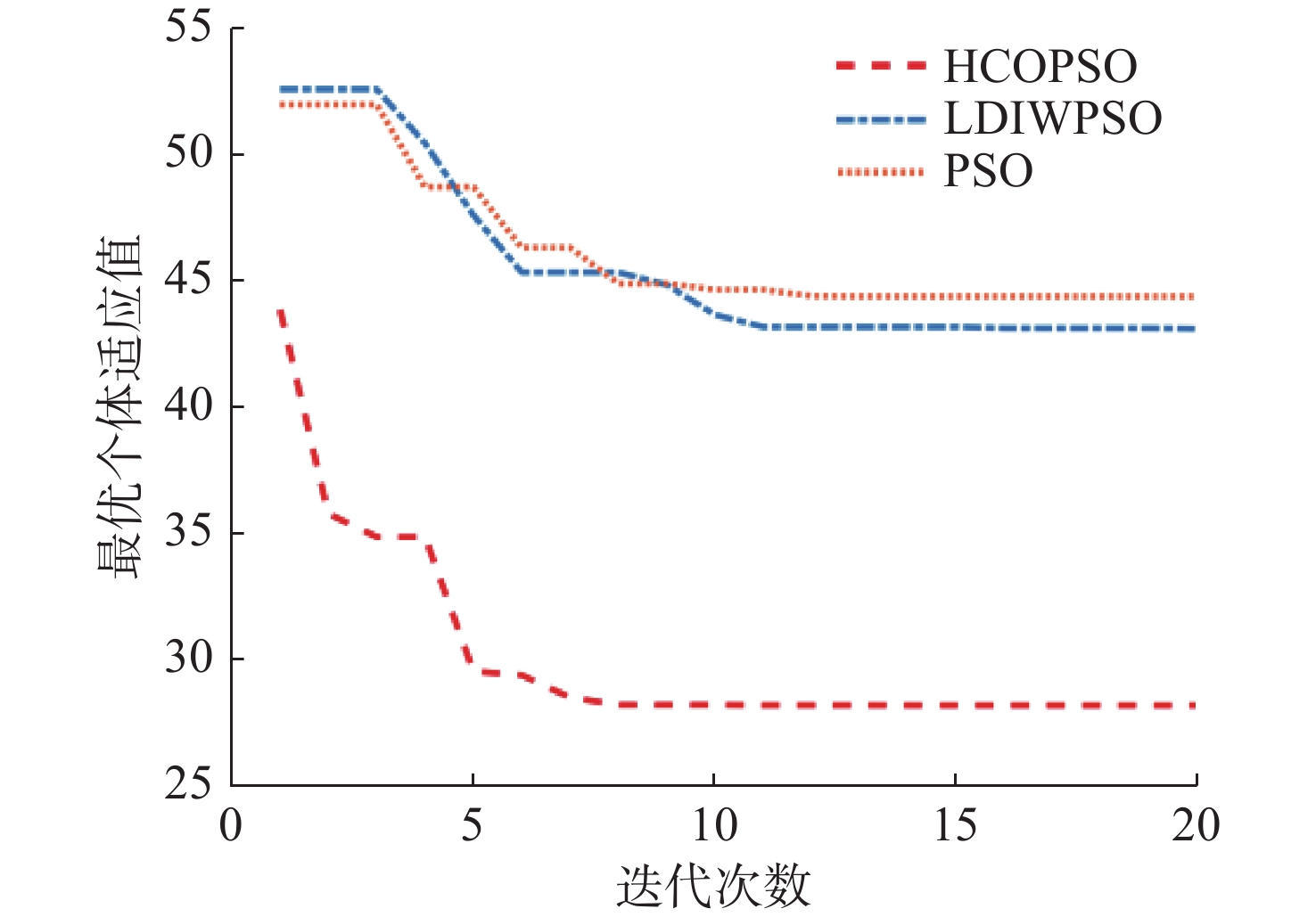
| Citation: | CHEN Mingzhi, LIU Lanjun, CHEN Jialin, YANG Rui, LI Ming. Parameter Tuning Method for USV Rudder Steering PID Control Based on HCOPSO Algorithm[J]. Journal of Unmanned Undersea Systems, 2023, 31(3): 381-387. doi: 10.11993/j.issn.2096-3920.202112022

|

| [1] |
李家良. 水面无人艇发展与应用[J]. 火力与指挥控制, 2012, 37(6): 203-207. doi: 10.3969/j.issn.1002-0640.2012.06.053
Li Jialiang. Development and application of unmanned surface vehicle[J]. Fire Control & Command Control, 2012, 37(6): 203-207. doi: 10.3969/j.issn.1002-0640.2012.06.053
|
| [2] |
Yi G, Liu Z, Zhang J, et al. Research on underactuated USV path following algorithm[C]//2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference. Chongqing, China: IEEE, 2020: 2141-2145.
|
| [3] |
祝川, 卢俊, 吴翔. 无人艇直驱式电液伺服舵机系统建模与仿真[J]. 舰船科学技术, 2019, 41(12): 87-92. doi: 10.3404/j.issn.1672-7649.2019.12.018
Zhu Chuan, Lu Jun, Wu Xiang. Modeling and simulation of direct-drive electro-hydraulicServo steering-gear system of USV[J]. Ship Science and Technology, 2019, 41(12): 87-92. doi: 10.3404/j.issn.1672-7649.2019.12.018
|
| [4] |
张雪飞, 袁鹏, 谭俊哲, 等. 基于模糊PID的无人帆船航向控制方法[J]. 中国舰船研究, 2019, 14(6): 15-21.
Zhang Xuefei, Yuan Peng, Tan Junzhe, et al. Heading control method of unmanned sailing boats based on fuzzy PID[J]. Chinese Journal of Ship Research, 2019, 14(6): 15-21.
|
| [5] |
Ashrafiuon H, Muske K R, McNinch L C, et al. Sliding-mode tracking control of surface vessels[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 4004-4012. doi: 10.1109/TIE.2008.2005933
|
| [6] |
陈霄, 周德超, 刘忠, 等. 欠驱动无人艇自适应滑模航迹跟踪控制[J]. 国防科技大学学报, 2018, 40(3): 127-134. doi: 10.11887/j.cn.201803020
Chen Xiao, Zhou Dechao, Liu Zhong, et al. Adaptive sliding-mode trajectory tracking control of underactuated unmanned surface vessels[J]. Journal of National University of Defense Technology, 2018, 40(3): 127-134. doi: 10.11887/j.cn.201803020
|
| [7] |
张继荣, 张天. 基于改进粒子群算法的PID控制参数优化[J]. 计算机工程与设计, 2020, 41(4): 1035-1040. doi: 10.16208/j.issn1000-7024.2020.04.023
Zhang Jirong, Zhang Tian. Optimization of PID control parameters based on improved particle group algorithm[J]. Computer Engineering and Design, 2020, 41(4): 1035-1040. doi: 10.16208/j.issn1000-7024.2020.04.023
|
| [8] |
Li Z, Zuo J, Lv R, et al. A hybrid multi-group co-evolution intelligent optimization algorithm: PSO-GWO[C]//2021 IEEE International Conference on Electrical Engineering and Mechatronics Technology. Qingdao, China: IEEE, 2021: 607-611.
|
| [9] |
戴文智, 杨新乐. 基于惯性权重对数递减的粒子群优化算法[J]. 计算机工程与应用, 2015, 51(17): 14-19. doi: 10.3778/j.issn.1002-8331.1412-0259
|
| [10] |
孙辉, 邓志诚, 赵嘉, 等. 混合均值中心反向学习粒子群优化算法[J]. 电子学报, 2019, 47(9): 1809-1818. doi: 10.3969/j.issn.0372-2112.2019.09.001
Kong Hui, Deng Zhicheng, Zhao Jia, et al. Hybrid mean center opposition-based learning particle swarm optimization[J]. Acta Electronica Sinica, 2019, 47(9): 1809-1818. doi: 10.3969/j.issn.0372-2112.2019.09.001
|
| [11] |
Yi G, Liu Z, Zhang J Q. Research on USV heading control method based on Kalman filter sliding mode control[C]//2020 Chinese Control and Decision Conference. Hefei, China: IEEE, 2020: 1547-1551.
|
| [12] |
Zhou L, Chen K, Chen Z, et al. Course control of unmanned sailboat based on BAS-PID algorithm[C]//2020 International Conference on System Science and Engineering. Kagawa, Japan: IEEE, 2020: 1-5.
|
| [13] |
薛秦锷, 闫兆武, 庄淡盛, 等. 改进粒子群整定涵道式倾转两轴旋翼机横滚PID控制器[J]. 工业控制计算机, 2020, 33(12): 103-105. doi: 10.3969/j.issn.1001-182X.2020.12.039
|
| [14] |
Shi Y, Eberhart R C. Parameter selection in particle swarm optimization[C]//Proceedings of the 7th International Conference on Evolutionary Programming. San Diego, CA, USA: IEEE, 1998: 591-600.
|
| [15] |
Tizhoosh H R. Opposition-based learning: A new scheme for machine intelligence[C]//International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce. Vienna, Austria: IEEE, 2005.
|

Figures(10) / Tables(3)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro



 DownLoad:
DownLoad: