- 中国科技核心期刊
- JST收录期刊
- Scopus收录期刊
| Citation: | CHEN Baizhong, WANG Chonglei, GUO Chunyu. Visual Recognition and Detection System for Small Targets of Near-Bottom Exploration Type Bionic UUV[J]. Journal of Unmanned Undersea Systems, 2023, 31(6): 911-917. doi: 10.11993/j.issn.2096-3920.2022-0099

|

| [1] |
Sfakiotakis M, Lane M D, Davies B J C. Review of fish swimming modes for aquatic locomotion[J]. IEEE Journal of Ocean Engineering, 1999, 24(2): 237-252. doi: 10.1109/48.757275
|
| [2] |
Triantafyllou M S, Triantafyllou G S. An efficient swimming machine[J]. Scientific American, 1995, 272(3): 4540-4548.
|
| [3] |
贺帆, 赵德安. 基于暗通道先验与YOLO的水下河蟹识别研究[J]. 软件导刊, 2020, 19(5): 29-32.
He Fan, Zhao Dean. Recognition of underwater crab based on dark channel prior and YOLO[J]. Software Guide, 2020, 19(5): 29-32.
|
| [4] |
万鹏, 赵竣威, 朱明, 等. 基于改进ResNet50模型的大宗淡水鱼种类识别方法[J]. 农业工程报, 2021, 37(12): 159-168.
Wan Peng, Zhao Junwei, Zhu Ming, et al. Freshwater fish species identification method based on improved ResNet50 model[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(12): 159-168.
|
| [5] |
Pan T, Huang H, Lee Jen, et al. Multi-scale ResNet for real-time underwater object detection[J/OL]. Signal, Image and Video Processing, 2020, 15(5): 941-949.
|
| [6] |
Jeon M, Lee Y, Shin Y S, et al. Underwater object detection and pose estimation using deep learning[J]. IFAC-PapersOnLine, 2019, 52(21): 78-81. doi: 10.1016/j.ifacol.2019.12.286
|
| [7] |
唐旭东, 朱炜, 庞永杰, 等. 水下机器人光视觉目标识别系统[J]. 机器人, 2009, 31(2): 171-179. doi: 10.3321/j.issn:1002-0446.2009.02.012
Tang Xudong, Zhu Wei, Pang Yongjie, et al. Target recognition system based on optical vision for AUV[J]. Robot, 2009, 31(2): 171-179. doi: 10.3321/j.issn:1002-0446.2009.02.012
|
| [8] |
Sagara S, Ambar R B, Takemura F. A stereo vision system for underwater vehicle-manipulator systems Proposal of a novel concept using pan-tilt-slidecameras[J]. Journal of Robotics and Mechatronics, 2013, 25(5): 785-794. doi: 10.20965/jrm.2013.p0785
|
| [9] |
江明明, 梁建军, 张一帆. 水下增稳视觉采集装置: CN 201820697177.5[P]. 2018-12-11.
|
| [10] |
Yang X, Wu Z X, Liu J C, et al. Design of a camera stabilizer system for robotic fish based on feedback-feedforward control[C]//35th Chinese Control Conference. Piscataway, USA: IEEE, 2016: 6044-6049.
|
| [11] |
Zhang P F, Wu Z X, Wang J, et al. 2-DOF camera stabilization platform for robotic fish based on active disturbance rejection control[C]//IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems. Piscataway, USA: IEEE, 2019: 283-288.
|
| [12] |
梅家宁. UUV光视觉图像的稳像方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.
|
| [13] |
徐义. 水下图像预处理技术研究[D]. 南京: 南京理工大学, 2013.
|
| [14] |
吴宇, 蔡永斌, 汤荣华. 水下视觉图像处理和识别技术研究[J]. 舰船电子工程, 2019, 39(5): 93-96. doi: 10.3969/j.issn.1672-9730.2019.05.024
Wu Yu, Cai Yongbin, Tang Ronghua. Research on the underwater optical imaging processing and identification[J]. Ship Electronic Engineering, 2019, 39(5): 93-96. doi: 10.3969/j.issn.1672-9730.2019.05.024
|
| [15] |
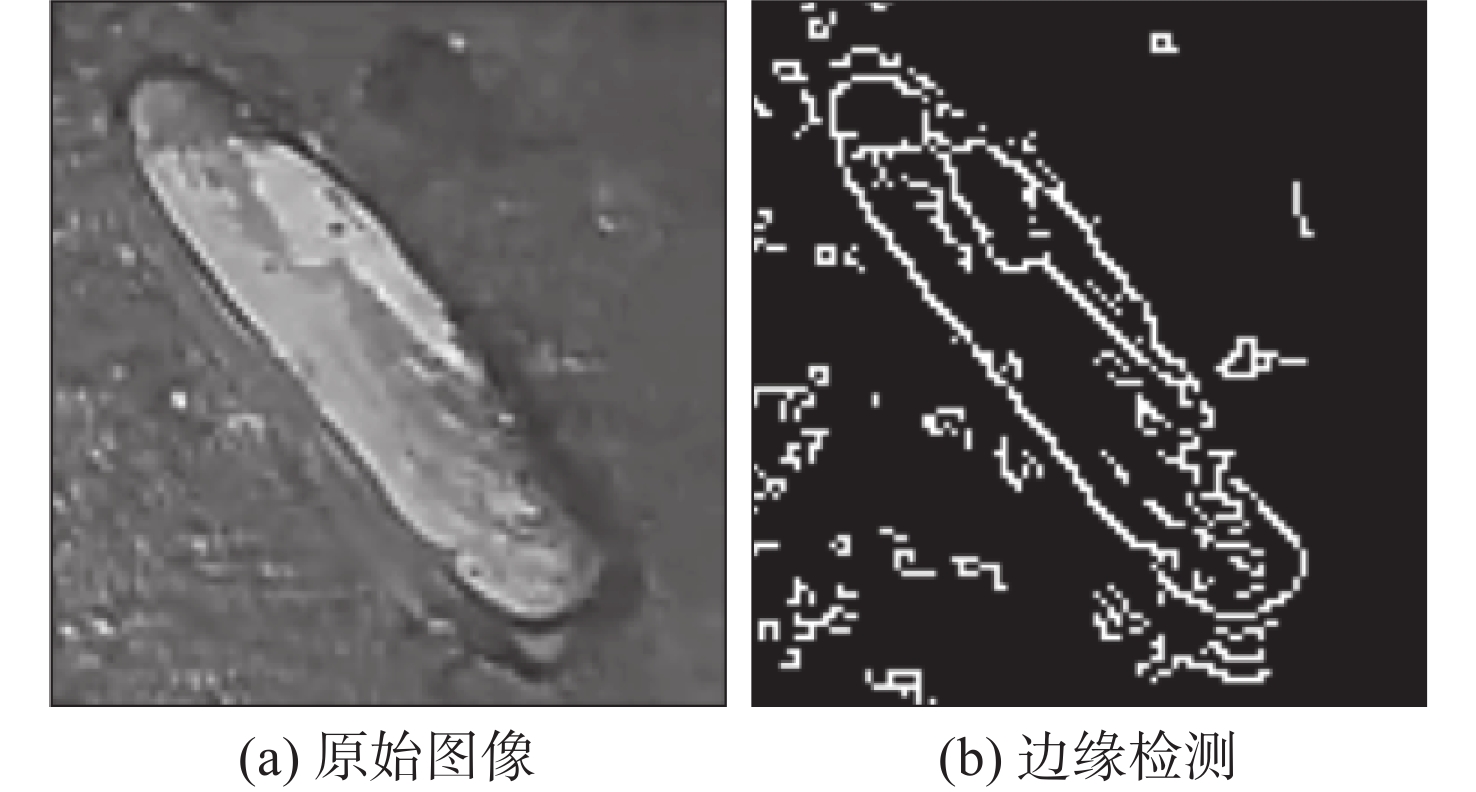
梅永, 庄建军. 基于Canny边缘检测的图像预处理优化算法[J]. 信息技术, 2022(1): 75-79. doi: 10.13274/j.cnki.hdzj.2022.01.014
|

Figures(17)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: