摘要:
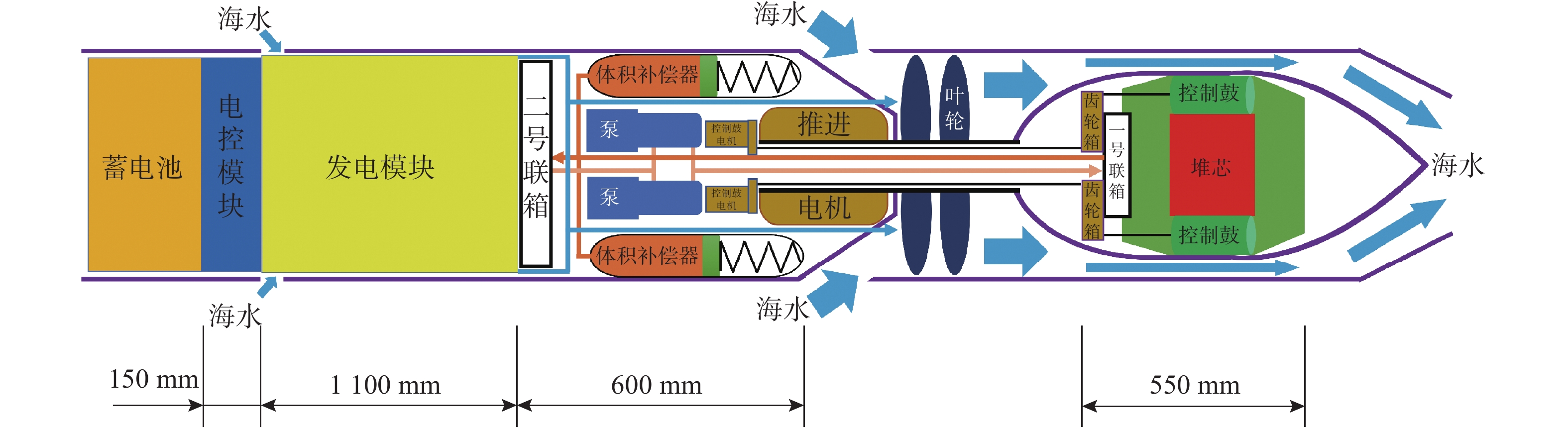
水下滑翔机变浮力装置在工作时其驱动电机和泵产生的热量会对其内部结构产生影响, 导致装置无法正常运行。针对这一问题, 采用有限元方法, 建立了变浮力装置热力学仿真模型, 先对变浮力装置的活塞在理想匀速运动状态时在不同海水深度下到达热平衡时的温度场分布进行了仿真计算, 获得了变浮力装置的温度随海水深度的变化规律。结果表明: 在所选不同海水深度的工况中, 海水深度为500 m时温度最低, 在海面时温度最高; 在海面处和100 m海深时, 变浮力装置到达热平衡时的最高温度存在于右侧活塞上, 分别为31.49℃和26.90℃, 在所选其他海水深度的工况下装置到达热平衡时的最高温度均存在于泵模型的压盖上。文中同时对不同电机转速到达热平衡时的温度场分布进行了仿真, 获得了1 500 m海深下变浮力装置温度随电机转速的变化规律, 可知电机转速为5 000 r/min时, 装置到达热平衡时的温度最高, 为40.95℃, 存在于泵模型的压盖上。根据仿真结果获得了该装置运行时温度较高的位置, 为判别装置工作时由于温度过高而影响关键部件正常运行的可能性提供参考。
赵宏昌, 黄桥高, 刘静. 水下滑翔机变浮力装置热力学仿真分析[J]. 水下无人系统学报, 2022, 30(5): 567-574. doi: 10.11993/j.issn.2096-3920.202109015.