- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
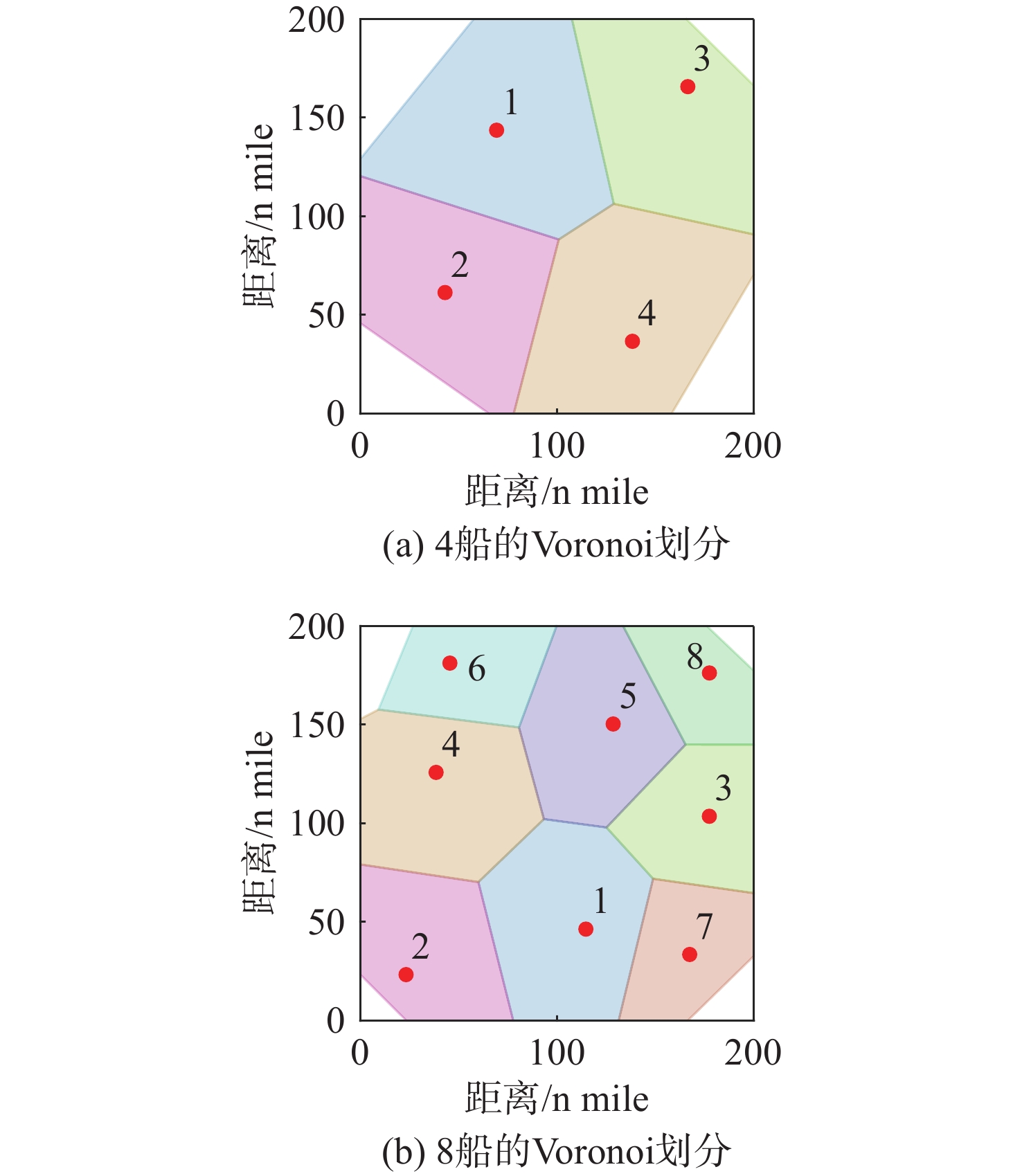
| Citation: | JIANG Haijun, ZHANG Yichao, SUN Yaping, CHEN Hongkun. Multi-Ship Cooperative Search Method Based on Dynamic Voronoi Partitioning[J]. Journal of Unmanned Undersea Systems, 2026, 34(1): 198-206. doi: 10.11993/j.issn.2096-3920.2025-0123

|

| [1] |
王磊, 吴福初. 基于线列阵声纳的水面舰艇检查搜潜仿真[J]. 火力与指挥控制, 2011, 36(11): 91-95.
WANG L, WU F C. Discussion about the efficiency of surface ships checking antisubmarine which using sonar buoy[J]. Fire Control & Command Control, 2011, 36(11): 91-95.
|
| [2] |
高永琪, 马威强, 张林森, 等. 分布式AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44(5): 1674-1675.
GAO Y Q, MA W Q, ZHANG L S, et al. Distributed multi-AUVs cooperative search method[J]. Systems Engineering and Electronics, 2022, 44(5): 1674-1675.
|
| [3] |
冯西安, 寇思玮, 岳玲. 水下移动平台网络化协同探测技术发展[J]. 应用声学, 2019, 38(4): 1674-1675. doi: 10.11684/j.issn.1000-310X.2019.04.006
FENG X A, KOU S W, YUE L. Development of networked collaborative detection technology for underwater mobile platforms[J]. Journal of Applied Acoustics, 2019, 38(4): 1674-1675. doi: 10.11684/j.issn.1000-310X.2019.04.006
|
| [4] |
付乐乐, 陈宏, 巩伟杰. 基于改进蚁群算法的水下机器 人路径规划[J]. 自动化与仪表, 2022, 37(4): 46-50. doi: 10.3969/j.issn.1009-0134.2022.12.039
FU L L, CHEN H, GONG W J. Path planning of underwater robots based on improved ant colony algorithm[J]. Automation & Instrumentation, 2022, 37(4): 46-50. doi: 10.3969/j.issn.1009-0134.2022.12.039
|
| [5] |
邹佳运, 曲泓玥, 陈志鹏. 大规模水下滑翔机集群区域覆盖探测路径规划[J]. 水下无人系统学报, 2021, 29(1): 23-29. doi: 10.11993/j.issn.2096-3920.2021.01.004
ZOU J Y, QU H Y, CHEN Z P. Path planning of a large-scale underwater glider swarm area coverage detection[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 23-29. doi: 10.11993/j.issn.2096-3920.2021.01.004
|
| [6] |
王飞, 陈芳香. 基于多目标粒子群算法的水面舰艇编队搜潜阵型参数优化方法[J]. 声学与电子工程, 2025, 158(2): 7-11.
WANG F, CHEN F X. Optimization method for anti-submarine formation parameters of surface ship formation based on multi-objective particle swarm algorithm[J]. Acoustics and Electronics Engineering, 2025, 158(2): 7-11.
|
| [7] |
JIA Q, XU H. Research on cooperative area search of multiple underwater robots based on the prediction of initial target information[J]. Ocean Engineering, 2019, 172: 660-670. doi: 10.1016/j.oceaneng.2018.12.035
|
| [8] |
廖燕荣, 姜可宇. 多舰协同分区搜潜动态航路规划[J]. 舰船电子工程, 2022, 42(7): 23-27. doi: 10.3969/j.issn.1672-9730.2022.07.007
LIAO Y R, JIANG K Y. Dynamic route planning of partitioned searching of multiple surface ships[J]. Ship Electronic Engineering, 2022, 42(7): 23-27. doi: 10.3969/j.issn.1672-9730.2022.07.007
|
| [9] |
陈捷, 刘海颖, 李志豪, 等. 基于改进Voronoi图的集群无人机区域覆盖方法[J]. 电子设计工程, 2023, 31(6): 31-32.
CHEN J, LIU H Y, LI Z H, et al. Multi-UAV area coverage method based on improved Voronoi diagram[J]. Electronic Design Engineering, 2023, 31(6): 31-32.
|
| [10] |
彭辉, 沈林成, 霍霄华. 多UAV协同区域覆盖搜索研究[J]. 系统仿真学报, 2007, 19(11): 2472-2476. doi: 10.3969/j.issn.1004-731X.2007.11.022
PENG H, SHEN L C, HUO X H. Research on multiple UAV cooperative area coverage searching[J]. Journal of System Simulation, 2007, 19(11): 2472-2476. doi: 10.3969/j.issn.1004-731X.2007.11.022
|
| [11] |
高永琪, 王鹏, 马威强, 等. 改进头脑风暴算法在多AUV协同搜索动态目标中的应用[J]. 国防科技大学学报, 2024, 46(6): 203-209.
GAO Y Q, WANG P, MA W Q, et al. Application of improved brain storm optimization algorithm in multi-AUV cooperative search moving targets[J]. Journal of National University of Defense Technology, 2024, 46(6): 203-209.
|
| [12] |
赵苗, 高永琪, 吴笛霄, 等. 复杂海战场环境下AUV全 局路径规划方法[J]. 国防科技大学学报, 2021, 43(1): 41-48. doi: 10.11887/j.cn.202101006
ZHAO M, GAO Y Q, WU D X, et al. AUV global path planning method in complex sea battle field environment[J]. Journal of National University of Defense Technology, 2021, 43(1): 41-48. doi: 10.11887/j.cn.202101006
|
| [13] |
张美燕, 蔡文郁. 基于多AUV间任务协作的水下多目标探测路径规划[J]. 传感技术学报, 2018, 31(7): 1102-1106.
ZHANG M Y, CAI W Y. Underwater targets tracking path planning based on task cooperation of multiple AUVs[J]. Chinese Journal of Sensors and Actuators, 2018, 31(7): 1101-1107.
|
| [14] |
黄杰, 孙伟, 高渝. 双属性概率图优化的无人机集群协同目标搜索[J]. 系统工程与电子技术, 2020, 42(1): 118-127. doi: 10.3969/j.issn.1001‐506X.2020.01.16
HUANG J, SUN W, GAO Y. Cooperative searching for the multi-UAVs based on dual-attribute probabilistic model optimization[J]. Systems Engineering and Electronics, 2020, 42(1): 118-127. doi: 10.3969/j.issn.1001‐506X.2020.01.16
|
| [15] |
张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41(5): 220-232.
ZHANG Z X, LONG T, XU G T, et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving target[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 220-232.
|
| [16] |
张宁, 寇小明, 李斌, 等. 基于遗传算法的应召搜潜路径优化[J]. 水下无人系统学报, 2023, 31(2): 244-251. doi: 10.11993/j.issn.2096-3920.2022-0002
ZHANG N, KOU X M, LI B, et al. Route optimization of on call submarine search based on genetic algorithm[J]. Journal of Unmanned Undersea Systems, 2023, 31(2): 244-251. doi: 10.11993/j.issn.2096-3920.2022-0002
|
Figures(9) / Tables(1)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: