- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
| Citation: | LÜ Yiwei, HU Haozhe, WANG Zeyu, ZENG Xinpei, WU Mingxin, WANG Chen, XIE Guangming. Research Status and Application Prospect of Underwater Soft Gripper[J]. Journal of Unmanned Undersea Systems, 2025, 33(5): 769-779. doi: 10.11993/j.issn.2096-3920.2025-0107

|

| [1] |
王田苗, 郝雨飞, 杨兴帮, 等. 软体机器人: 结构、驱动、传感与控制[J]. 机械工程学报, 2017, 53(13): 1-13. doi: 10.3901/JME.2017.13.001
WANG T M, HAO Y F, YANG X B, et al. Soft robotics: Structure, actuation, sensing and control[J]. Journal of Mechanical Engineering, 2017, 53(13): 1-13. doi: 10.3901/JME.2017.13.001
|
| [2] |
RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. doi: 10.1038/nature14543
|
| [3] |
DESHPANDE S, ALMUBARAK Y. Octopus-inspired robotic arm powered by shape memory alloys(SMA)[J]. Actuators, 2023, 12(10): 377. doi: 10.3390/act12100377
|
| [4] |
VAR S C S, JOVANOVA J. Design of a soft underwater gripper with SMA actuation[C]//Proceedings of ASME 2023 Conference on Smart Materials, Adaptive Structures and Intelligent Systems(SMASIS 2023). Austin, Texas, USA: 2023, ASME: 1-8.
|
| [5] |
GOH G D, GOH G L, LYU Z, et al. 3D printing of robotic soft grippers: Toward smart actuation and sensing[J]. Advanced Materials Technologies, 2022, 7(11): 2101672. doi: 10.1002/admt.202101672
|
| [6] |
ABOZAID Y A, ABOELRAYAT M T, FAHIM I S, et al. Soft robotic grippers: A review on technologies, materials, and applications[J]. Sensors and Actuators A: Physical, 2024, 372: 115380. doi: 10.1016/j.sna.2024.115380
|
| [7] |
PEREIRA P J P D, CAMPILHO R D S G, PEREIRA J P G T, et al. Design and validation of gripper solution using soft robotics principles[J]. Advances in Science and Technology, 2023, 132: 109-119.
|
| [8] |
ZHANG S, KE X, JIANG Q, et al. Fabrication and functionality integration technologies for small-scale soft robots[J]. Advanced Materials, 2022, 34(52): 2200671. doi: 10.1002/adma.202200671
|
| [9] |
BRUDER D, GRAULE M A, TEEPLE C B, et al. Increasing the payload capacity of soft robot arms by localized stiffening[J]. Science Robotics, 2023, 8(81): eadf9001. doi: 10.1126/scirobotics.adf9001
|
| [10] |
CROWLEY G B, ZENG X, SU H J. A 3D printed soft robotic gripper with a variable stiffness enabled by a novel positive pressure layer jamming technology[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5477-5482. doi: 10.1109/LRA.2022.3157448
|
| [11] |
HAM K, HAN J, PARK Y J. Soft gripper using variable stiffness mechanism and its application[J]. International Journal of Precision Engineering and Manufacturing, 2018, 19(4): 487-494. doi: 10.1007/s12541-018-0059-2
|
| [12] |
ZHAO P, XIONG C, GAO Z, et al. Design and experiment investigation on soft grippers with modular variable stiffness structure[J]. Micromachines, 2023, 15(1): 88. doi: 10.3390/mi15010088
|
| [13] |
PAGOLI A, ALKHATIB M, MEZOUAR Y. A soft variable stiffness gripper with magnetorheological fluids for robust and reliable grasping[J]. IEEE Robotics and Automation Letters, 2024, 9(5): 4519-4526. doi: 10.1109/LRA.2024.3382424
|
| [14] |
CHEN T Y, YANG X D, ZHANG B J, et al. Scale-inspired programmable robotic structures with concurrent shape morphing and stiffness variation[J]. Science Robotics, 2024, 9(92): eadl0307. doi: 10.1126/scirobotics.adl0307
|
| [15] |
ZHANG Z, CHEN G L, XUN Y H, et al. Bioinspired rigid-soft hybrid origami actuator with controllable versatile motion and variable stiffness[J]. IEEE Transactions on Robotics, 2023, 39(6): 4768-4784. doi: 10.1109/TRO.2023.3311630
|
| [16] |
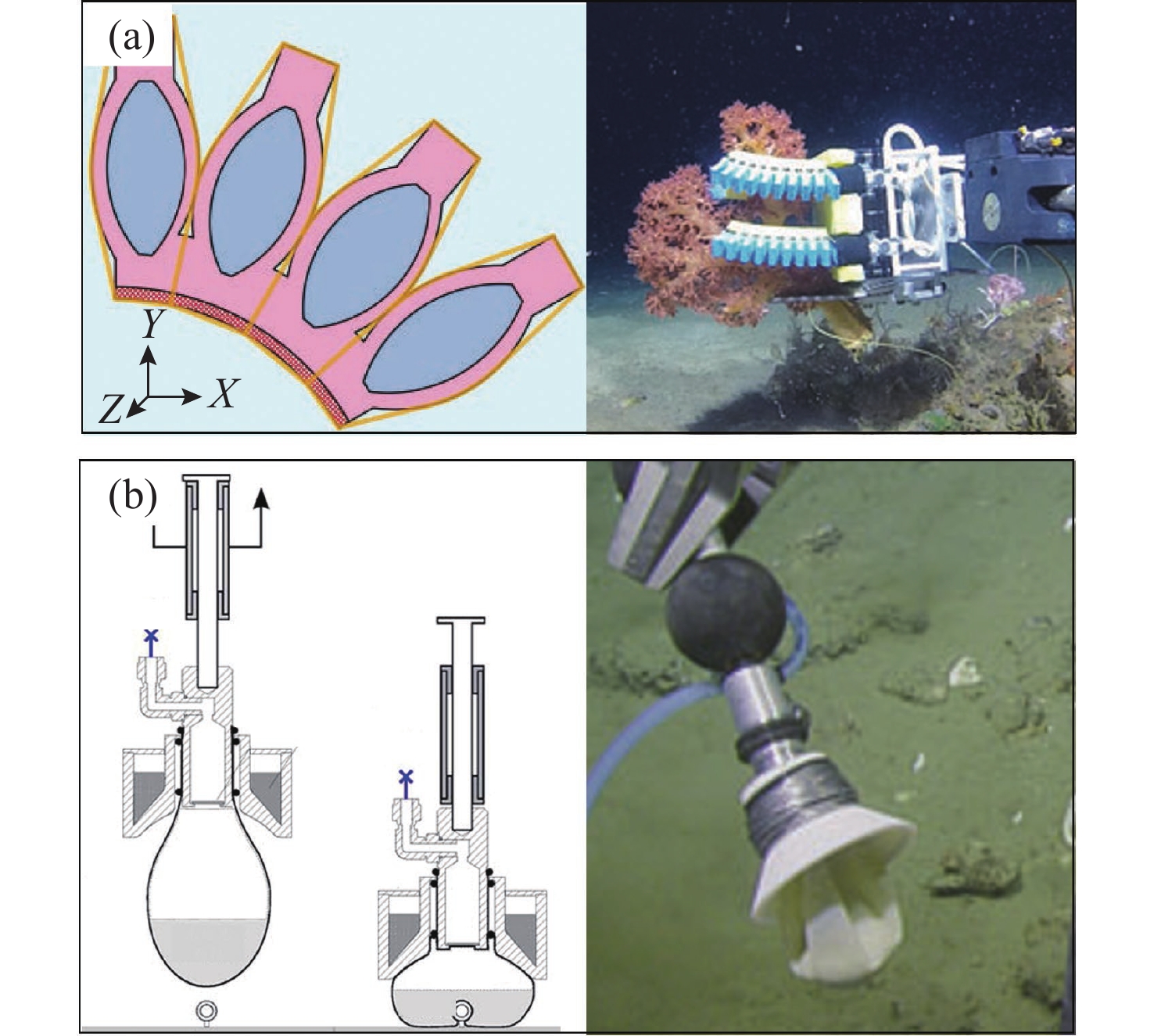
NIE S, LIU X, JI H, et al. Simulation and experiment study on deformation characteristics of the water hydraulic flexible actuator used for the underwater gripper[J]. IEEE Access, 2020, 8: 191447-191459. doi: 10.1109/ACCESS.2020.3032179
|
| [17] |
JI H, ZHANG L, NIE S, et al. Optimization design and experiment study on a water hydraulic flexible actuator integrating flexible inner skeleton and soft external skin used for underwater flexible gripper[J]. Sensors and Actuators A: Physical, 2024, 366: 114957. doi: 10.1016/j.sna.2023.114957
|
| [18] |
JI H, LAN Y, NIE S, et al. Development of an anthropomorphic soft manipulator with rigid-flexible coupling for underwater adaptive grasping[J]. Soft Robotics, 2023, 10(6): 1070-1082. doi: 10.1089/soro.2022.0215
|
| [19] |
HUANG J, WANG Z, LI J, et al. A design of underwater soft gripper with water pressure sensing and enhanced stiffness[J]. Robotica, 2022, 41(2): 548-565.
|
| [20] |
CHEN G, YANG X, ZHANG X, et al. Water hydraulic soft actuators for underwater autonomous robotic systems[J]. Applied Ocean Research, 2021, 109: 102551. doi: 10.1016/j.apor.2021.102551
|
| [21] |
赵宇豪, 赵慧, 谭代彬. 软体机器人流体驱动方式综述[J]. 液压与气动, 2021, 45(4): 135-145.
ZHAO Y H, ZHAO H, TAN D B. Review of fluid drive methods for soft robots[J]. Chinese Hydraulics & Pneumatics, 2021, 45(4): 135-145.
|
| [22] |
NAGACHANDRIKA P, SARATHI R, SRIDHARAN K. Characterization of silicone rubber/MgO nanocomposites for grippers in transmission line inspection robots[J]. IEEE Transactions on Nanotechnology, 2022, 21: 709-719.
|
| [23] |
SHIBUYA T, WATANABE S, SHINTAKE J. Silicone-layered waterproof electrohydraulic soft actuators for bio-inspired underwater robots[J]. Frontiers in Robotics and AI, 2024, 11: 1298624. doi: 10.3389/frobt.2024.1298624
|
| [24] |
WANG H, XU H, ABU-DAKKA F J, et al. A bidirectional soft biomimetic hand driven by water hydraulic for dexterous underwater grasping[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2186-2193. doi: 10.1109/LRA.2022.3143297
|
| [25] |
GALLOWAY K C, BECKER K P, PHILLIPS B, et al. Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3(1): 23-33. doi: 10.1089/soro.2015.0019
|
| [26] |
LICHT S, COLLINS E, MENDES M L, et al. Stronger at depth: Jamming grippers as deep-sea sampling tools[J]. Soft Robotics, 2017, 4(4): 305-316. doi: 10.1089/soro.2017.0028
|
| [27] |
SINATRA N R, TEEPLE C B, VOGT D M, et al. Ultra-gentle manipulation of delicate structures using a soft robotic gripper[J]. Science Robotics, 2019, 4(33): eaax5425. doi: 10.1126/scirobotics.aax5425
|
| [28] |
LIU W, BAI X, YANG H, et al. Tendon driven bistable origami flexible gripper for high-speed adaptive grasping[J]. IEEE Robotics and Automation Letters, 2024, 9(6): 5417-5424. doi: 10.1109/LRA.2024.3389413
|
| [29] |
JAMALI A, KNOERLEIN R, MISHRA D B, et al. Soft gripping fingers made of multi-stacked dielectric elastomer actuators with backbone strategy[J]. Biomimetics, 2024, 9(8): 505. doi: 10.3390/biomimetics9080505
|
| [30] |
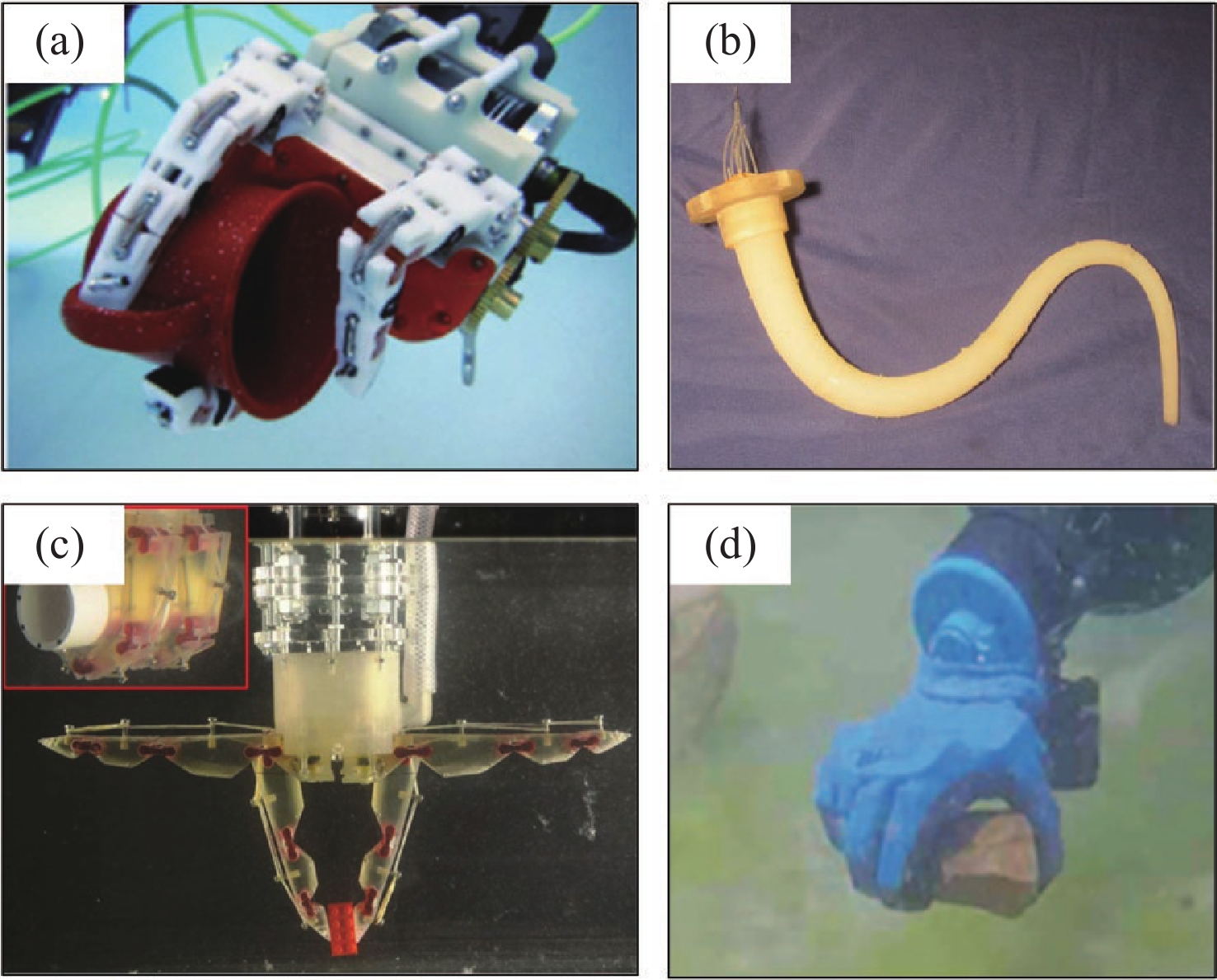
STUART H, WANG S, KHATIB O, et al. The ocean one hands: An adaptive design for robust marine manipulation[J]. The International Journal of Robotics Research, 2017, 36(2): 150-166. doi: 10.1177/0278364917694723
|
| [31] |
RENDA F, GIORELLI M, CALISTI M, et al. Dynamic model of a multibending soft robot arm driven by cables[J]. IEEE Transactions on Robotics, 2014, 30(5): 1109-1122. doi: 10.1109/TRO.2014.2325992
|
| [32] |
STUART H S, WANG S, GARDINEER B, et al. A compliant underactuated hand with suction flow for underwater mobile manipulation[C]//2014 IEEE international conference on robotics and automation(ICRA). Hong Kong , China: IEEE, 2014: 6691-6697.
|
| [33] |
MURA D, BARBAROSSA M, DINUZZI G, et al. A soft modular end effector for underwater manipulation: A gentle, adaptable grasp for the ocean depths[J]. IEEE Robotics & Automation Magazine, 2018, 25(4): 45-56.
|
| [34] |
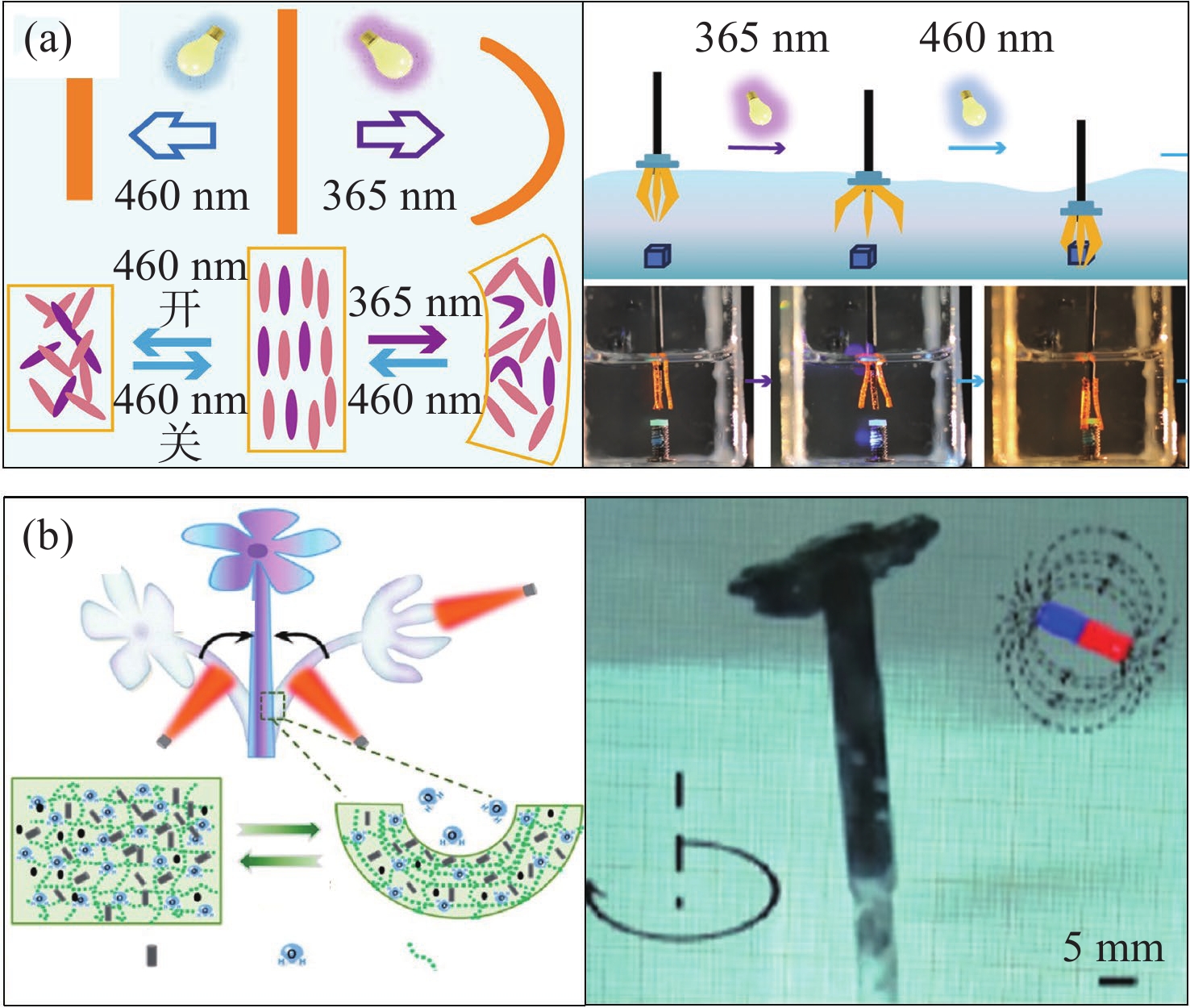
GUO H, NASARE R, LIANG C, et al. Halogen-bonded liquid crystal elastomers as initiator-free photochemical actuators[J]. Advanced Materials, 2025: 2504551.
|
| [35] |
WANG X, WANG W, LIU H, et al. Bionic sea anemone actuator with a double-layered gripper driven by multiple physical fields[J]. ACS Applied Polymer Materials, 2023, 5(7): 5582-5591. doi: 10.1021/acsapm.3c00886
|
| [36] |
QU J, XU Y, LI Z, et al. Recent advances on underwater soft robots[J]. Advanced Intelligent Systems, 2024, 6(2): 2300299. doi: 10.1002/aisy.202300299
|
| [37] |
WEI X, WANG Y, LIU Y, et al. Biomimetic design strategies for biomedical applications[J]. Matter, 2024, 7(3): 826-854. doi: 10.1016/j.matt.2023.12.030
|
| [38] |
KUMAR G D, REGO R M, RAO H J, et al. Understanding the interfacial science of nature-inspired materials for versatile applications[J]. Surfaces and Interfaces, 2024, 47: 104181. doi: 10.1016/j.surfin.2024.104181
|
| [39] |
HE S, GUO B, SUN X, et al. Bio-inspired instant underwater adhesive hydrogel sensors[J]. ACS Applied Materials & Interfaces, 2022, 14(40): 45869-45879.
|
| [40] |
CHEN Y, MENG J, ZHU Z, et al. Bio-inspired underwater super oil-repellent coatings for anti-oil pollution[J]. Langmuir, 2018, 34(21): 6063-6069. doi: 10.1021/acs.langmuir.8b01061
|
| [41] |
CHEN R, SONG R, ZHANG Z, et al. Bio-inspired shape-adaptive soft robotic grippers augmented with electro adhesion functionality[J]. Soft Robotics, 2019, 6(6): 701-712. doi: 10.1089/soro.2018.0120
|
| [42] |
LI G, WONG T W, SHIH B, et al. Bioinspired soft robots for deep-sea exploration[J]. Nature Communications, 2023, 14(1): 7097. doi: 10.1038/s41467-023-42882-3
|
| [43] |
HASANSHAHI B, CAO L, SONG K Y, et al. Design of soft robots: A review of methods and future opportunities for research[J]. Machines, 2024, 12(8): 527. doi: 10.3390/machines12080527
|
| [44] |
CIANCHETTI M, CALISTI M, MARGHERI L, et al. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot[J]. Bioinspiration & Biomimetics, 2015, 10(3): 035003.
|
| [45] |
ZHAO Y, WU Y, WANG L, et al. Bio-inspired reversible underwater adhesive[J]. Nature Communications, 2017, 8(1): 2218. doi: 10.1038/s41467-017-02387-2
|
| [46] |
WANG W, LIU J, XIE G, et al. A bio-inspired electrocommunication system for small underwater robots[J]. Bioinspiration & Biomimetics, 2017, 12(3): 036002.
|
| [47] |
LIU Y, WANG L, NIU F, et al. A track-type inverted climbing robot with bio-inspired spiny grippers[J]. Journal of Bionic Engineering, 2020, 17(5): 920-931. doi: 10.1007/s42235-020-0093-5
|
| [48] |
JIA J J, XIAN Q W, FA J D, et al. Bio-inspired steganography for secure underwater acoustic communications[J]. IEEE Communications Magazine, 2018, 56(10): 156-162. doi: 10.1109/MCOM.2018.1601228
|
| [49] |
ZHANG Y, KONG D, SHI Y, et al. Recent progress on underwater soft robots: adhesion, grabbing, actuating, and sensing[J]. Frontiers in Bioengineering and Biotechnology, 2023, 11: 1196922. doi: 10.3389/fbioe.2023.1196922
|
| [50] |
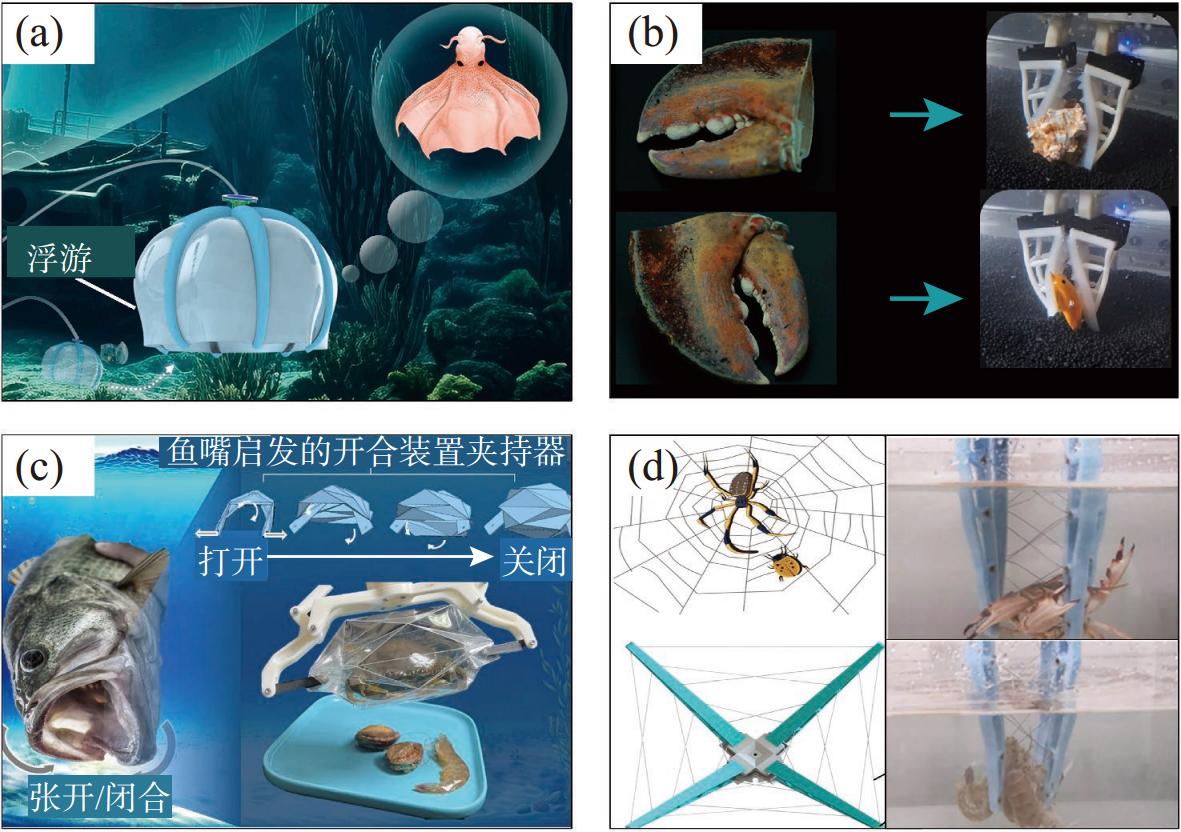
WU Q X, YANG X C, WU Y, et al. A novel underwater bipedal walking soft robot bio-inspired by the coconut octopus[J]. Bioinspiration & Biomimetics, 2021, 16(4): 046007.
|
| [51] |
SONG J, FENG Y, HONG Z, et al. Octopus-inspired adaptable soft grippers based on 4D printing: numerical modeling, inverse design, and experimental validation[J]. Advanced Intelligent Systems, 2023, 5(8): 2200384. doi: 10.1002/aisy.202200384
|
| [52] |
JIANG H, HAN X, JING Y, et al. Rigid-soft interactive design of a lobster-inspired finger surface for enhanced grasping underwater[J]. Frontiers in Robotics and AI, 2021, 8: 787187. doi: 10.3389/frobt.2021.787187
|
| [53] |
GUO H, HUANG J, ZHANG I, et al. Fish mouth inspired origami gripper for robust multi-type underwater grasping[EB/OL]. (2025-03-20)[2025-09-29]. https://arxiv.org/abs/2503.11049
|
| [54] |
CHEN X B, YAO J T, ZHANG S, et al. Web Gripper: Bioinspired cobweb soft gripper for adaptable and stable grasping[J]. IEEE Transactions on Robotics, 2023, 39(4): 3059-3071. doi: 10.1109/TRO.2023.3262115
|
| [55] |
CAPALBO C E, TOMAINO D, BRUNO F, et al. A soft robotic gripper with neutrally buoyant jamming pads for gentle yet secure grasping of underwater objects[J]. IEEE Journal of Oceanic Engineering, 2022, 47(4): 975-983. doi: 10.1109/JOE.2022.3156746
|
| [56] |
KIM M, OH J, SON D. Layer-jamming soft gripper for improved stiffness control and underwater adhesion[J]. Extreme Mechanics Letters, 2025, 77: 102322. doi: 10.1016/j.eml.2025.102322
|
| [57] |
WU M, ZHENG X, LIU R, et al. Glowing sucker octopus (stauroteuthis syrtensis)-inspired soft robotic gripper for underwater self-adaptive grasping and sensing[J]. Advanced Science, 2022, 9(17): 2104382. doi: 10.1002/advs.202104382
|
| [58] |
MO L, ZHANG D, FU X, et al. A multidirectional external perception soft actuator based on flexible optical waveguide for underwater teleoperation[J]. Advanced Intelligent Systems, 2023, 5(10): 2300029. doi: 10.1002/aisy.202300029
|
| [59] |
SHI Q F, SUN Z D, LE X H, et al. Soft robotic perception system with ultrasonic auto-positioning and multimodal sensory intelligence[J]. ACS Nano, 2023, 17(5): 4985-4998. doi: 10.1021/acsnano.2c12592
|
| [60] |
NADEAU P, ABBOTT M, MELVILLE D, et al. Tactile sensing based on fingertip suction flow for submerged dexterous manipulation[C]//2020 IEEE International Conference on Robotics and Automation(ICRA). Paris, France: IEEE, 2020: 3701-3707.
|
| [61] |
ZUO Z, WANG H, ZHANG Q, et al. A deep-sea sensorized soft gripper with force estimation and interactive capabilities[J]. IEEE/ASME Transactions on Mechatronics, 2025: 1-11.
|
| [62] |
MAO B, ZHOU K, XIANG Y, et al. A bioinspired robotic finger for multimodal tactile sensing powered by fiber optic sensors[J]. Advanced Intelligent Systems, 2024, 6(8): 2400175. doi: 10.1002/aisy.202400175
|
| [63] |
CHEN H, LI Y, XU P, et al. Octopus-inspired soft gripper with embedded triboelectric tactile sensor for underwater target recognition and grasp[J]. Nano Energy, 2025, 140: 111007. doi: 10.1016/j.nanoen.2025.111007
|
| [64] |
XIE Z, YUAN F, LIU J, et al. Octopus-inspired sensorized soft arm for environmental interaction[J]. Science Robotics, 2023, 8(84): 7852. doi: 10.1126/scirobotics.adh7852
|
| [65] |
XIANG F, ZHANG Z, HAN Y, et al. Highly sensitive aquatic iontronic-based tri-axis force sensor array for underwater robotic gripping[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 1-10.
|
| [66] |
GUO N, HAN X, LIU X, et al. Autoencoding a soft touch to learn grasping from on-land to underwater[J]. Advanced Intelligent Systems, 2024, 6(1): 2300382. doi: 10.1002/aisy.202300382
|
| [67] |
WANG Q, SONG Y, LIU P, et al. Self-powered underwater pressing and position sensing and autonomous object grasping with a porous thermoplastic polyurethane film sensor[J]. Advanced Functional Materials, 2024, 34(28): 2315648. doi: 10.1002/adfm.202315648
|
| [68] |
LIANG M, ZHU J, KE X, et al. Bio-inspired multimodal soft grippers: A review[J]. Bioinspiration & Biomimetics, 2025, 20(3): 31002.
|
| [69] |
LIU J, SONG Z, LU Y, et al. An underwater robotic system with a soft continuum manipulator for autonomous aquatic grasping[J]. IEEE/ASME Transactions on Mechatronics, 2023, 29(2): 1007-1018.
|
| [70] |
KURUMAYA S, PHILLIPS B T, BECKER K P, et al. A modular soft robotic wrist for underwater manipulation[J]. Soft Robotics, 2018, 5(4): 399-409. doi: 10.1089/soro.2017.0097
|
| [71] |
SANDOVAL J A, XU T, ADIBNAZARI I, et al. Combining suction and friction to stabilize a soft gripper to shear and normal forces, for manipulation of soft objects in wet environments[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4134-4141. doi: 10.1109/LRA.2022.3149306
|
| [72] |
ZUO Z, HE X, WANG H, et al. A nitinol-embedded wearable soft robotic gripper for deep-sea manipulation: a wearable device for deep-sea delicate operation[J]. IEEE Robotics & Automation Magazine, 2024, 31(1): 96-107.
|
| [73] |
WU M, AFRIDI W H, WU J, et al. Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities[J]. Research, 2024, 7: 456. doi: 10.34133/research.0456
|
| [74] |
ZHAO Y, ZHU J, ZHANG J, et al. Enhancing grasping diversity with a pinch-suction and soft-rigid hybrid multimodal gripper[J]. IEEE Transactions on Robotics, 2025, 41: 3890-3907. doi: 10.1109/TRO.2025.3577014
|
| [75] |
YOUSSEF S M, SOLIMAN M, SALEH M A, et al. Underwater soft robotics: A review of bioinspiration in design, actuation, modeling, and control[J]. Micromachines, 2022, 13(1): 110. doi: 10.3390/mi13010110
|
| [76] |
HASIB S A, GULZAR M M, OISHY S R, et al. An investigation of innovative strategies in underwater soft robotics[J]. Engineering Science and Technology, an International Journal, 2025, 70: 102123. doi: 10.1016/j.jestch.2025.102123
|
| [77] |
KIM H, NA H, NOH S, et al. Inherently integrated microfiber-based flexible proprioceptive sensor for feedback-controlled soft actuators[J]. NPJ Flexible Electronics, 2024, 8(1): 15. doi: 10.1038/s41528-024-00302-6
|
| [78] |
ZHANG J, ZHOU J, CHENG Z K, et al. Fabrication, mechanical modeling, and experiments of a 3D-motion soft actuator for flexible sensing[J]. IEEE Access, 2020, 8: 159100-159109. doi: 10.1109/ACCESS.2020.3017447
|
| [79] |
DU T, HUGHES J, WAH S, et al. Underwater soft robot modeling and control with differentiable simulation[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4994-5001. doi: 10.1109/LRA.2021.3070305
|
| [80] |
SUO F, HUI X, HUA P, et al. A biomimetic rigid-soft hybrid underwater gripper with compliance, stability, precise control, and high load capacity[J]. IEEE Transactions on Robotics, 2025, 41: 3099-3112. doi: 10.1109/TRO.2025.3562458
|
| [81] |
HUANG J, WANG Z, LI J, et al. A design of underwater soft gripper with water pressure sensing and enhanced stiffness[J]. Robotica, 2023, 41(2): 548-565. doi: 10.1017/S0263574722001412
|
| [82] |
XU F, WANG H, CHEN W, et al. Adaptive visual servoing control for an underwater soft robot[J]. Assembly Automation, 2018, 38(5): 669-677. doi: 10.1108/AA-12-2017-193
|
| [83] |
PICARDI G, DE L M, CHIMIENTI G, et al. User-driven design, and development of an underwater soft gripper for biological sampling and litter collection[J]. Journal of Marine Science and Engineering, 2023, 11(4): 771. doi: 10.3390/jmse11040771
|
| [84] |
FANG Q, ZHANG J, XIANG P, et al. Reconfigurable transparent variable-stiffness soft robot for underwater operations[J]. Advanced Intelligent Systems, 2024, 6(9): 2300688. doi: 10.1002/aisy.202300688
|
| [85] |
LI H, LI X, WANG B, et al. A fault-tolerant soft swallowing robot capable of grasping delicate structures underwater[J]. IEEE Robotics and Automation Letters, 2023, 8(6): 3302-3309. doi: 10.1109/LRA.2023.3266668
|
| [86] |
KANNO R, KWAK B, PANKHURST M, et al. Edible soft actuators based on konjac glucomannan for underwater operation[J]. Advanced Intelligent Systems, 2024, 6(5): 2300473. doi: 10.1002/aisy.202300473
|
| [87] |
HERRERO P D, MARTÍNEZ B H. Soft gripper design and fabrication for underwater grasping[J]. Applied Sciences, 2022, 12(21): 10694. doi: 10.3390/app122110694
|
| [88] |
SHAN B, LIU C, CHEN R, et al. A self-powered sensor for detecting slip state and pressure of underwater actuators based on triboelectric nanogenerator[J]. Materials Today Nano, 2023, 24: 100391. doi: 10.1016/j.mtnano.2023.100391
|
| [89] |
ZAREBIDOKI M, DHUPIA J S, LIAROKAPIS M, et al. A cable-driven underwater robotic system for delicate manipulation of marine biology samples[J]. Journal of Field Robotics, 2024, 41(8): 2615-2629. doi: 10.1002/rob.22381
|
| [90] |
VOGT D M, BECKER K P, PHILLIPS B T, et al. Shipboard design, and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms[J]. PLOS ONE, 2018, 13(8): 0200386.
|
| [91] |
PHILLIPS B T, BECKER K P, KURUMAYA S, et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration[J]. Scientific Reports, 2018, 8(1): 14779. doi: 10.1038/s41598-018-33138-y
|

Figures(12)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro



 DownLoad:
DownLoad: