- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
| Citation: | DAI Yicheng, XU Yining, ZHANG Yuzhu, JIANG Zhehao, HE Xinyong, YUAN Han, QU Juntian. Research Status and Underwater Application Prospects of Flexible Manipulator[J]. Journal of Unmanned Undersea Systems, 2025, 33(5): 744-757. doi: 10.11993/j.issn.2096-3920.2025-0106

|

| [1] |
HU Z, XU W, YANG T, et al. Coordinate grasp and operation planning for hybrid rigid flexible dual-arm space robot[J]. Journal of Astronautics, 2022, 43(10): 1311-1321.
|
| [2] |
CHIKHAOUI M T, BURGNER-KAHRS J. Control of continuum robots for medical applications: State of the art[C]//ACTUATOR 2018; 16th International Conference on New Actuators. Bremen, Germany: ACTUATOR, 2018: 1-11.
|
| [3] |
牟宗高. 面向狭小空间作业的超冗余机器人轨迹规划及控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
|
| [4] |
OLSON G, CHOW S, NICOLAI A, et al. A generalizable equilibrium model for bending soft arms with longitudinal actuators[J]. The International Journal of Robotics Research, 2019, 40: 147-177.
|
| [5] |
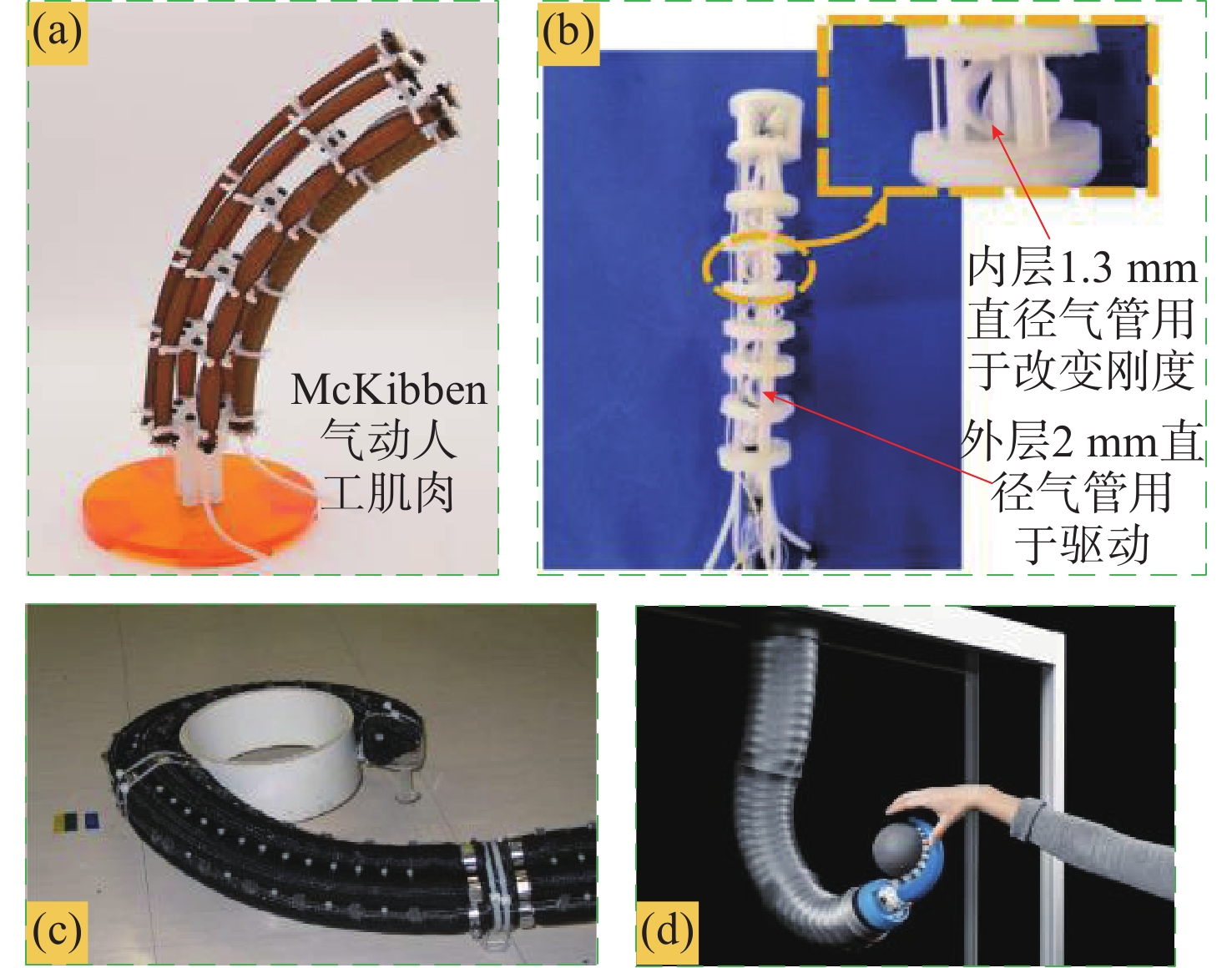
LIU Y G, YANG Y, PENG Y, et al. A light soft manipulator with continuously controllable stiffness actuated by a thin mckibben pneumatic artificial muscle[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(4): 1944-1952. doi: 10.1109/TMECH.2020.2993017
|
| [6] |
KAPADIA A D, WALKER I, DAWSON D, et al. A model-based sliding mode controller for extensible continuum robots[C]//World Scientific and Engineering Academy and Society(WSEAS). Stevens Point, Wisconsin, USA: WSEAS, 2010: 113-120.
|
| [7] |
FESTO. Bionic grippers and soft robots[EB/OL]. (2025-01-01)[2025-08-12]. https://www.festo.com/us/en/e/about-festo/research-and-development/bionic-learning-network/bionic-grippers-and-soft-robots-id_33288/.
|
| [8] |
YI J, CHEN X, SONG C, et al. Customizable three-dimensional-printed origami soft robotic joint with effective behavior shaping for safe interactions[J]. IEEE Transactions on Robotics, 2019, 35(1): 114-123. doi: 10.1109/TRO.2018.2871440
|
| [9] |
TALAS S K, BAYDERE B A, ALTINSOY T, et al. Design and development of a growing pneumatic soft robot[J]. Soft Robotics, 2020, 7(4): 521-533. doi: 10.1089/soro.2019.0083
|
| [10] |
GE AEROSPACE. OC Robotics snake arm robot [EB/OL]. (2023-09-15)[2025-08-12]. https://www.geaerospace.com/commercial/services/engine-maintenance-technologies/.
|
| [11] |
BUCKINGHAM R, CHITRAKARAN V, CONKIE R, et al. Snake-arm robots: A new approach to aircraft assembly[C]//Aerospace Technology Conference and Exposition. Rohnert Park, California: SAE International, 2007.
|
| [12] |
SIASUN. 探龙系列蛇形臂机器人[EB/OL]. (2021-09-11)[2025-08-12]. https://www.siasun.com/article/493. html.
|
| [13] |
TANG L, WANG J, ZHENG Y, et al. Design of a cable-driven hyper-redundant robot with experimental validation[J]. International Journal of Advanced Robotic Systems, 2017, 14(5): 172988141773445.
|
| [14] |
QIN G, WU H, CHENG Y, et al. Adaptive trajectory control of an under-actuated snake robot[J]. Applied Mathematical Modelling, 2022, 106: 756-769. doi: 10.1016/j.apm.2022.02.001
|
| [15] |
XU W, LIU T, LI Y. Kinematics, Dynamics, and control of a cable-driven hyper-redundant manipulator[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(4): 1693-1704. doi: 10.1109/TMECH.2018.2842141
|
| [16] |
刘天亮. 狭小空间作业绳驱分段联动机械臂运动规划与控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2022.
|
| [17] |
LI J, XU W, LI W, et al. Design and development of composite linkage mechanism for cable-driven segmented manipulator to increase synchronous accuracy and transmission distance[J]. IEEE Robotics and Automation Letters, 2023, 9: 25-32.
|
| [18] |
DAI Y C, LI X R, WANG X, et al. A novel cable-driven manipulator with constant-curvature deflections and equal displacements of the antagonistic cables[C]//The 15th International Conference on Intelligent Robotics and Applications(ICIRA). Harbin, China: ICIRA, 2022: 76-87.
|
| [19] |
AMANOV E, NGUYEN T D, BURGNER-KAHRS J. Tendon-driven continuum robots with extensible sections—A model-based evaluation of path-following motions[J]. The International Journal of Robotics Research, 2019, 40(1): 7-23.
|
| [20] |
YOON H S, YI B J. A 4-DOF flexible continuum robot using a spring backbone[C]//2009 International Conference on Mechatronics and Automation. Changchun, China: ICMA, 2009: 1249-1254
|
| [21] |
SHEN W, YANG G, ZHENG T, et al. An accuracy enhancement method for a cable-driven continuum robot with a flexible backbone[J]. IEEE Access, 2020, 8: 37474-81. doi: 10.1109/ACCESS.2020.2975087
|
| [22] |
LI Z, YU H, REN H, et al. A novel constrained tendon-driven serpentine manipulator[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Hamburg, Germany: IROS, 2015: 5966-5971.
|
| [23] |
GRAVAGNE I A, RAHN C D, WALKER I D. Large deflection dynamics and control for planar continuum robots[J]. IEEE/ASME Transactions on Mechatronics, 2003, 8(2): 299-307. doi: 10.1109/TMECH.2003.812829
|
| [24] |
LIU T, MU Z, WANG H, et al. A cable-driven redundant spatial manipulator with improved stiffness and load capacity[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Madrid, Spain: IROS, 2018: 6628-6633.
|
| [25] |
LIU T, MU Z, XU W, et al. Improved mechanical design and simplified motion planning of hybrid active and passive cable-driven segmented manipulator with coupled motion[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Macau, China: IRSO, 2019: 5978-5983.
|
| [26] |
TANG S F, LI T T, WANG Q I, et al. Kinematic modeling and experimental verification of underdriven rigid-flex integrated manipulator[C]//2024 International Conference on Advanced Robotics and Mechatronics(ICARM). Tokyo, Japan: ICARM, 2024: 958-963.
|
| [27] |
WANG C, FRAZELLE C G, WAGNER J R, et al. Dynamic control of multisection three-dimensional continuum manipulators based on virtual discrete-jointed robot models[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 777-788. doi: 10.1109/TMECH.2020.2999847
|
| [28] |
WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: A review[J]. The International Journal of Robotics Research, 2010, 29(13): 1661-1683. doi: 10.1177/0278364910368147
|
| [29] |
LI Z, WU L, REN H, et al. Kinematic comparison of surgical tendon-driven manipulators and concentric tube manipulators[J]. Mechanism and Machine Theory, 2017, 107: 148-165. doi: 10.1016/j.mechmachtheory.2016.09.018
|
| [30] |
CHIRIKJIAN G S, BURDICK J W. Kinematically optimal hyper-redundant manipulator configurations[J]. IEEE Transactions on Robotics and Automation, 1995, 11(6): 794-806. doi: 10.1109/70.478427
|
| [31] |
SONG S, LI Z, YU H, et al. Shape reconstruction for wire-driven flexible robots based on Bézier curve and electromagnetic positioning[J]. Mechatronics, 2015, 29: 28-35. doi: 10.1016/j.mechatronics.2015.05.003
|
| [32] |
DAI Y C, LI X R, WANG X, et al. Investigation on the shape reconstruction of cable-driven continuum manipulators considering super-large deflections and variable structures[C]//The 15th International Conference on Intelligent Robotics and Applications(ICIRA). Harbin, China: ICIRA, 2022: 183-194.
|
| [33] |
MBAKOP S, TAGNE G, CHEVILLON T, et al. PH-gauss-lobatto reduced-order-model for shape control of soft-continuum manipulators[J]. IEEE Transactions on Robotics, 2024, 40: 2641-2655. doi: 10.1109/TRO.2024.3391650
|
| [34] |
JOSÉ L, ANA I P, PAULO C, et al.A fast and robust kinematic model for a 12 DoF hyper-redundant robot positioning: An optimization proposal[C]//International Conference of Numerical Analysis And Applied Mathematics(ICNAAM 2016). Rhodes, Greece: ICNAAM, 2016:270007.
|
| [35] |
BAYANI S, RASTEGARI R, SAMAVATI F C. Kinematic modeling of hyper redundant robot using ball screw mechanism approach[C]//2017 Artificial Intelligence and Robotics(IRANOPEN). Qazvin, Iran: IEEE, 2017: 17-22.
|
| [36] |
MOTAHARI A, ZOHOOR H, KORAYEM M H. A new motion planning method for discretely actuated hyper-redundant manipulators[J]. Robotica, 2017, 35(1): 101-118. doi: 10.1017/S0263574714002963
|
| [37] |
KIM J, JIE W, KIM H, et al. Modified configuration control with potential field for inverse kinematic solution of redundant manipulator[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(4): 1782-1790. doi: 10.1109/TMECH.2021.3077914
|
| [38] |
JING X, JIANG J, XIE F, et al. Continuum manipulator with rigid-flexible coupling structure[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 11386-11393. doi: 10.1109/LRA.2022.3199683
|
| [39] |
ZHOU K, MAO B, ZHANG Y, et al. A cable-actuated soft manipulator for dexterous grasping based on deep reinforcement learning[J]. Advanced Intelligent Systems, 2024, 6(10): 2400112. doi: 10.1002/aisy.202400112
|
| [40] |
TAN N, YU P, WANG X, et al. Behavior-predefined adaptive control for heterogeneous continuum robots[J]. The International Journal of Robotics Research, 2024, 44(1): 65-95.
|
| [41] |
YUAN H, ZHOU L, XU W. A comprehensive static model of cable-driven multi-section continuum robots considering friction effect[J]. Mechanism and Machine Theory, 2019, 135: 130-149. doi: 10.1016/j.mechmachtheory.2019.02.005
|
| [42] |
YUAN H, LI Z, XU W. Kinetostatics for variable cross-section continuum manipulators[C]//2021 IEEE International Conference on Robotics and Automation(ICRA), Xi’an, China: ICRA, 2021: 11878-11883.
|
| [43] |
SU H J. A Pseudorigid-body 3R model for determining large deflection of cantilever beams subject to tip loads[J]. Journal of Mechanisms and Robotics, 2009, 1(2): 021008. doi: 10.1115/1.3046148
|
| [44] |
HUANG S, MENG D, SHE Y, et al. Statics of continuum space manipulators with nonconstant curvature via pseudorigid-body 3R model[J]. IEEE Access, 2018, 6: 70854-70865. doi: 10.1109/ACCESS.2018.2881261
|
| [45] |
HUANG S, MENG D, WANG X, et al. A 3D static modeling method and experimental verification of continuum robots based on pseudo-rigid body theory[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Macau, China: IROS, 2019: 4672-4677.
|
| [46] |
MODASSIR F M, DILIP P O, VADALI M. Finite element method-based dynamic modeling framework for flexible continuum manipulators[J]. Journal of Mechanisms and Robotics, 2024, 16(10): 1-12.
|
| [47] |
NI S, CHEN W, CHEN T. Dynamic modeling and analysis of multi-flexible-link space manipulators under time-varying dynamic boundary conditions[J]. Advances in Space Research, 2024, 74(10): 5224-5243. doi: 10.1016/j.asr.2024.07.067
|
| [48] |
GUPTA N, PRATIHER B. Dynamic modeling and effective vibration reduction of dual-link flexible manipulators with two-stage cascade PID and active torque actuation[J]. Mechanism and Machine Theory, 2025, 205: 105867. doi: 10.1016/j.mechmachtheory.2024.105867
|
| [49] |
HONG W, XIE L, LIU J, et al. Development of a novel continuum robotic system for maxillary sinus surgery[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1226-1237. doi: 10.1109/TMECH.2018.2818442
|
| [50] |
PATERNÒ L, TORTORA G, MENCIASSI A. Hybrid soft-rigid actuators for minimally invasive surgery[J]. Soft Robotics, 2018, 5(6): 783-799. doi: 10.1089/soro.2017.0140
|
| [51] |
FONTANELLI G A, BUONOCORE L R, FICUCIELLO F, et al. An external force sensing system for minimally invasive robotic surgery[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1543-1554. doi: 10.1109/TMECH.2020.2979027
|
| [52] |
SONG J, MA J, TANG L, et al. Deformation measurement of drogue in wind tunnel test based on OptiTrack system[C]//2020 5th International Conference on Automation, Control and Robotics Engineering(CACRE). Dalian, China: CACRE, 2020: 565-569.
|
| [53] |
XU W, YAN P, WANG F, et al. Vision-based simultaneous measurement of manipulator configuration and target pose for an intelligent cable-driven robot[J]. Mechanical Systems and Signal Processing, 2022, 165: 108347. doi: 10.1016/j.ymssp.2021.108347
|
| [54] |
CAMARILLO D B, LOEWKE K E, CARLSON C R, et al. Vision based 3-D shape sensing of flexible manipulators[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA: IEEE, 2008: 2940-2947.
|
| [55] |
GUGLIELMINO E, BRANSON D, SILVESTRI P. A bio-inspired flexible arm for subsea inspection: A water hydraulically actuated continuum manipulator[J]. Journal of Marine Science and Engineering, 2025, 13(4): 676. doi: 10.3390/jmse13040676
|
| [56] |
WANG F, YAN L, LI J, et al. A configuration measurement method of cable-driven space manipulator by link equivalent center points recognition[C]//2022 IEEE International Conference on Robotics and Biomimetics(ROBIO). Jinghong, China: ROBIO, 2022: 999-1004.
|
| [57] |
PENG J, XU W, LIU T, et al. End-effector pose and arm-shape synchronous planning methods of a hyper-redundant manipulator for spacecraft repairing[J]. Mechanism and Machine Theory, 2021, 155: 104062. doi: 10.1016/j.mechmachtheory.2020.104062
|
| [58] |
LU J, LIU F, GIRERD C, et al. Image-based pose estimation and shape reconstruction for robot manipulators and soft, continuum robots via differentiable rendering[EB/OL]. (2023-02-27)[2025-08-12].https://arxiv.org/abs/2302.14039.
|
| [59] |
LOBATON E J, FU J, TORRES L G, et al. Continuous shape estimation of continuum robots using X-ray images[C]//2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013: 725-732.
|
| [60] |
BOCTOR E M, CHOTI M A, BURDETTE E C, et al. Three-dimensional ultrasound-guided robotic needle placement: An experimental evaluation[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2008, 4(2): 180-191.
|
| [61] |
CHUNWOO K, DOYOUNG C, PETRISOR D, et al. Ultrasound probe and needle-guide calibration for robotic ultrasound scanning and needle targeting[J]. IEEE Transactions on Biomedical Engineering, 2013, 60(6): 1728-1734. doi: 10.1109/TBME.2013.2241430
|
| [62] |
PARK Y L, ELAYAPERUMAL S, DANIEL B, et al. Real-time estimation of 3-D needle shape and deflection for MRI-guided interventions[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(6): 906-915.
|
| [63] |
ZHENG Y, WU B, CHEN Y, et al. Design and validation of cable-driven hyper-redundant manipulator with a closed-loop puller-follower controller[J]. Mechatronics, 2021, 78: 102605. doi: 10.1016/j.mechatronics.2021.102605
|
| [64] |
WU B, ZENG L, ZHENG Y, et al. A closed-loop controller for cable-driven hyper-redundant manipulator with joint angle sensors[C]//2019 IEEE International Conference on Robotics and Biomimetics(ROBIO). Dali, China: ROBIO, 2019: 2433-2438.
|
| [65] |
CAO Y, LIU Z, YU H, et al. Spatial shape sensing of a multisection continuum robot with integrated DTG sensor for maxillary sinus surgery[J]. IEEE/ASME Transactions on Mechatronics, 2023, 28(2): 715-725. doi: 10.1109/TMECH.2022.3205604
|
| [66] |
WALKER K L, CHEN H Y, PARTRIDGE A J, et al. Closed-loop control and disturbance mitigation of an underwater multi-segment continuum manipulator[EB/OL]. (2025-03-16)[2025-08-12]. https://arxiv.org/abs/2503.12508.
|
| [67] |
SITLER J L, WANG L. A modular open-source continuum manipulator for underwater remotely operated vehicles[J]. Journal of Mechanisms and Robotics, 2022, 14(6): 060906. doi: 10.1115/1.4054309
|
| [68] |
SHEN W, HE J, YANG G, et al. Shape sensing and kinematic control of a cable-driven continuum robot based on stretchable capacitive sensors[J]. Sensors, 2024, 24(11): 3385. doi: 10.3390/s24113385
|
| [69] |
OSMAN D, DU X, MINTON T, et al. Shape sensing for continuum robotics using optoelectronic sensors with convex reflectors[J]. Electronics, 2024, 13(7): 1253. doi: 10.3390/electronics13071253
|
| [70] |
KIM B, HA J, PARK F C, et al. Optimizing curvature sensor placement for fast, accurate shape sensing of continuum robots[C]//2014 IEEE International Conference on Robotics and Automation(ICRA). Hong Kong, China: ICRA, 2014: 5374-5379.
|
| [71] |
RYU S C, DUPONT P E. FBG-based shape sensing tubes for continuum robots[C]//2014 IEEE International Conference on Robotics and Automation(ICRA). Hong Kong, China: IEEE, 2014: 3531-3537.
|
| [72] |
MOON H, JEONG J, OCKCHUL K, et al. FBG-based polymer-molded shape sensor integrated with minimally invasive surgical robots[C]//2015 IEEE International Conference on Robotics and Automation(ICRA). Seattle, WA, USA: IEEE, 2015: 1770-1775.
|
| [73] |
LU Y, CHEN W, CHEN Z, et al. FBG-Based variable-length estimation for shape sensing of extensible soft robotic manipulators[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Kyoto, Japan: IEEE, 2022: 1-8.
|
| [74] |
HEGDE C, SU J, TAN J M R, et al. Sensing in soft robotics[J]. ACS Nano, 2023, 17(16): 15277-15307. doi: 10.1021/acsnano.3c04089
|
| [75] |
QU J, CUI G, LI Z, et al. Advanced flexible sensing technologies for soft robots[J]. Advanced Functional Materials, 2024, 34(29): 2401311. doi: 10.1002/adfm.202401311
|
| [76] |
HASHIM A, AL-KHAFAJI Y, HADI A. Synthesis and characterization of flexible resistive humidity sensors based on PVA/PEO/CuO nanocomposites[J]. Transactions on Electrical and Electronic Materials, 2019, 20(6): 530-536. doi: 10.1007/s42341-019-00145-3
|
| [77] |
ZHANG X, MADDIPATLA D, BOSE A K, et al. A pinted MWCNTs/PDMS based flexible resistive temperature detector[C]//2020 IEEE International Conference on Electro Information Technology(EIT). Chicago, IL, USA: EIT, 2020: 509-513.
|
| [78] |
XIA P, LIU P, WU S, et al. Highly stretchable and sensitive flexible resistive strain sensor based on waterborne polyurethane polymer for wearable electronics[J]. Composites Science and Technology, 2022, 221: 109355. doi: 10.1016/j.compscitech.2022.109355
|
| [79] |
ZHANG L, ZHANG S, WANG C, et al. highly sensitive capacitive flexible pressure sensor based on a high-permittivity mxene nanocomposite and 3D network electrode for wearable electronics[J]. ACS Sensors, 2021, 6(7): 2630-2641. doi: 10.1021/acssensors.1c00484
|
| [80] |
LI R, SI Y, ZHU Z, et al. Supercapacitive iontronic nanofabric sensing[J]. Advanced Materials, 2017, 29(36): 1700253. doi: 10.1002/adma.201700253
|
| [81] |
CHA Y, SEO J, KIM J S, et al. Human–computer interface glove using flexible piezoelectric sensors[J]. Smart Materials and Structures, 2017, 26(5): 057002. doi: 10.1088/1361-665X/aa6b64
|
| [82] |
WANG H S, HONG S K, HAN J H, et al. Biomimetic and flexible piezoelectric mobile acoustic sensors with multiresonant ultrathin structures for machine learning biometrics[J]. Science Advances, 2021, 7(7): 1-8.
|
| [83] |
YUE X, LU R, YANG Q, et al. Flexible wearable optical sensor based on optical microfiber bragg grating[J]. Journal of Lightwave Technology, 2023, 41(6): 1858-1864. doi: 10.1109/JLT.2022.3227186
|
| [84] |
FAN F R, TIAN Z Q, LIN WANG Z. Flexible triboelectric generator[J]. Nano Energy, 2012, 1(2): 328-334. doi: 10.1016/j.nanoen.2012.01.004
|
| [85] |
CHANG T H, TIAN Y, LI C, et al. Stretchable graphene pressure sensors with Shar-Pei-like hierarchical wrinkles for collision-aware surgical robotics[J]. ACS Applied Materials & Interfaces, 2019, 11(10): 10226-10236.
|
| [86] |
NOH Y, HAN S, GAWENDA P, et al. A contact force sensor based on S-shaped beams and optoelectronic sensors for flexible manipulators for minimally invasive surgery(MIS)[J]. IEEE Sensors Journal, 2020, 20(7): 3487-3495. doi: 10.1109/JSEN.2019.2945163
|
| [87] |
GAO A, LIU N, SHEN M, et al. Laser-profiled continuum robot with integrated tension sensing for simultaneous shape and tip force estimation[J]. Soft Robotics, 2020, 7(4): 421-443. doi: 10.1089/soro.2019.0051
|
| [88] |
GAO A, ZHOU Y, CAO L, et al. Fiber bragg grating-based triaxial force sensor with parallel flexure hinges[J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8215-8223. doi: 10.1109/TIE.2018.2798569
|
| [89] |
SUN Y, CHEN T, LI D, et al. Stretchable, multiplexed, and bimodal sensing electronic armor for colonoscopic continuum robot enhanced by triboelectric artificial synapse[J]. Advanced Materials, 2025, 37(33): 2502203. doi: 10.1002/adma.202502203
|
| [90] |
LIU W, DUO Y, LIU J, et al. Touchless interactive teaching of soft robots through flexible bimodal sensory interfaces[J]. Nature Communications, 2022, 13(1): 5030. doi: 10.1038/s41467-022-32702-5
|
| [91] |
TANG J, ZHANG Y, HUANG F, et al. Design and kinematic control of the cable-driven hyper-redundant manipulator for potential underwater applications[J]. Applied Sciences, 2019, 9(6): 1142. doi: 10.3390/app9061142
|
| [92] |
LIN B, XU W, LI W, et al. Ex situ sensing method for the end-effector’s six-dimensional force and link’s contact force of cable-driven redundant manipulators[J]. IEEE Transactions on Industrial Informatics, 2024, 20(5): 7995-8006. doi: 10.1109/TII.2024.3369248
|
| [93] |
KAPADIA A, WALKER I D. Task-space control of extensible continuum manipulators[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, CA: IEEE, 2011: 1087-1092.
|
| [94] |
MAHVASH M, DUPONT P E. Stiffness control of surgical continuum manipulators[J]. IEEE Transactions on Robotics, 2011, 27(2): 334-345. doi: 10.1109/TRO.2011.2105410
|
| [95] |
ZHANG L, GAO Y, MU Z, et al. A variable-stiffness planning method considering both the overall configuration and cable tension for hyper-redundant manipulators[J]. IEEE/ASME Transactions on Mechatronics, 2023, 29(1): 659-667.
|
| [96] |
SPINELLI F A, KATZSCHMANN R K. A unified and modular model predictive control framework for soft continuum manipulators under internal and external constraints[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Kyoto, Japan: IROS, 2022: 9393-9400.
|
| [97] |
BRAGANZA D, DAWSON D M, WALKER I D, et al. A neural network controller for continuum robots[J]. IEEE Transactions on Robotics, 2007, 23(6): 1270-1277. doi: 10.1109/TRO.2007.906248
|
| [98] |
MELINGUI A, LAKHAL O, DAACHI B, et al. Adaptive neural network control of a compact bionic handling arm[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2862-2875. doi: 10.1109/TMECH.2015.2396114
|
| [99] |
BERDICA U, JACKSON M, VERONESE N E, et al. Reinforcement learning controllers for soft robots using learned environments[C]//2024 IEEE 7th International Conference on Soft Robotics(RoboSoft). San Diego, CA, USA: IEEE, 2024: 933-939.
|
| [100] |
吴妍. 受章鱼启发的线驱动柔性臂三维建模与DQN控制[D]. 浙江: 杭州电子科技大学, 2022.
|
| [101] |
BARJINI A H, KOLAGAR S A A, YAQUBI S, et al. Deep reinforcement learning-based motion planning and PDE control for flexible manipulators[J]. IEEE Robotics and Automation Letters, 2025, 10(9): 8634-8641. doi: 10.1109/LRA.2025.3588057
|
| [102] |
ZHU J W, DONG Z Y, YANG Z J, et al. A new reinforcement learning fault-tolerant tracking control method with application to baxter robot[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(2): 1331-1341. doi: 10.1109/TMECH.2023.3309888
|
| [103] |
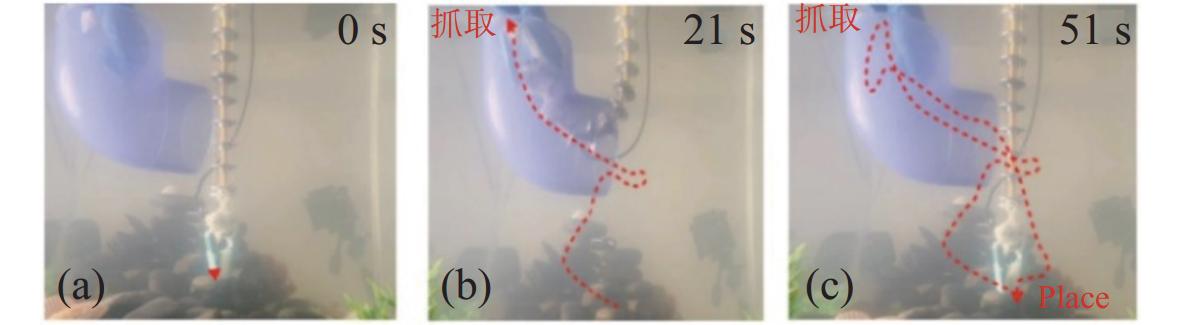
LIU J, SONG Z, LU Y, et al. An underwater robotic system with a soft continuum manipulator for autonomous aquatic grasping[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(2): 1007-1018. doi: 10.1109/TMECH.2023.3321054
|
| [104] |
VISWANADHAPALLI J K, ELUMALAI V K, SHIVRAM S, et al. Deep reinforcement learning with reward shaping for tracking control and vibration suppression of flexible link manipulator[J]. Applied Soft Computing, 2024, 152: 110756. doi: 10.1016/j.asoc.2023.110756
|
| [105] |
LI Y, WANG X, KWOK K W. Towards adaptive continuous control of soft robotic manipulator using reinforcement learning[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Kyoto, Japan: IEEE, 2022: 7074-7081.
|
| [106] |
CENTURELLI A, ARLEO L, RIZZO A, et al. Closed-loop dynamic control of a soft manipulator using deep reinforcement learning[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4741-4748. doi: 10.1109/LRA.2022.3146903
|
| [107] |
LOU G, WANG C, XU Z, et al. Controlling soft robotic arms using hybrid modelling and reinforcement learning[J]. IEEE Robotics and Automation Letters, 2024, 9(8): 7070-7077. doi: 10.1109/LRA.2024.3418312
|
| [108] |
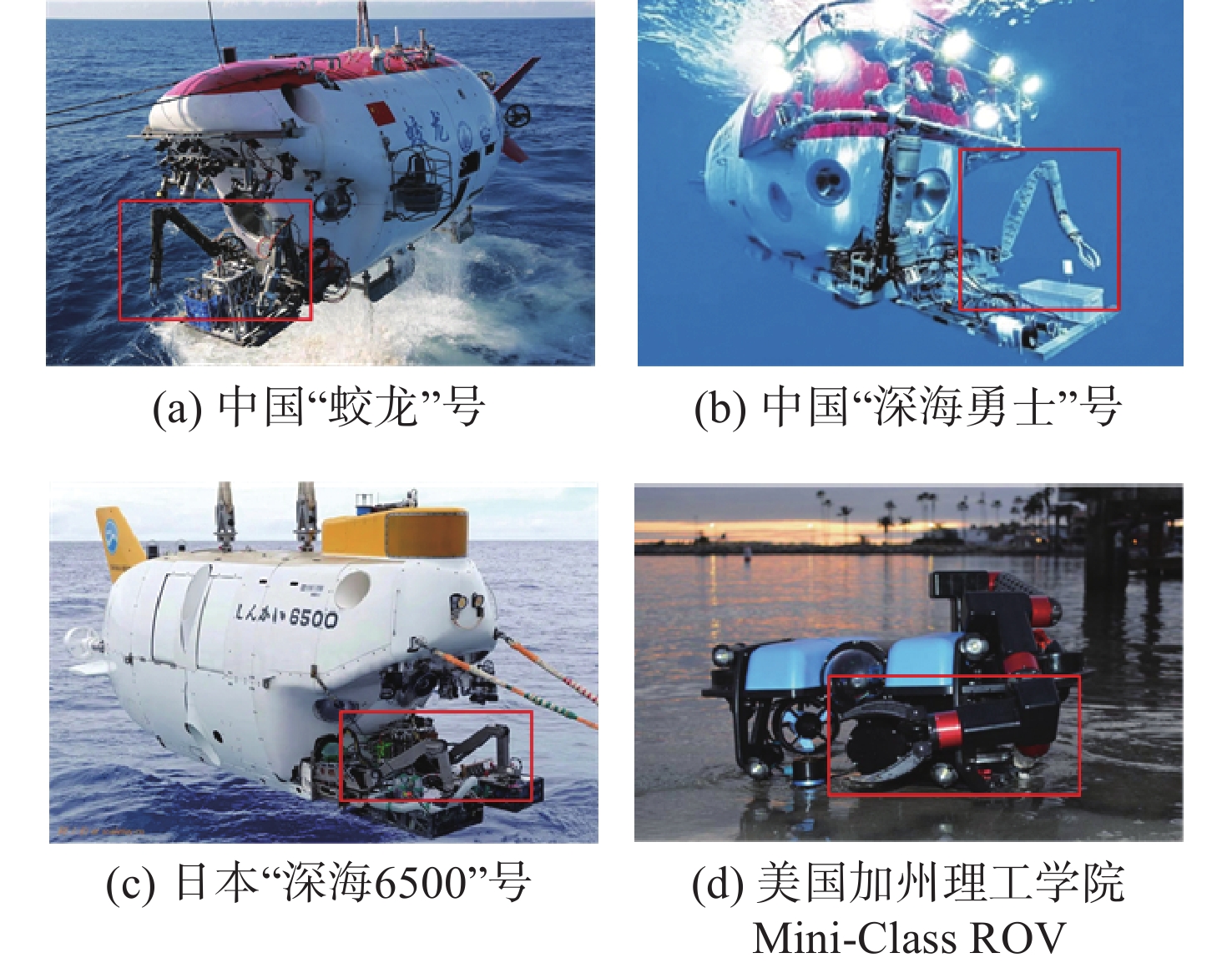
ZHANG X, YIN Y. Interactive simulation design of underwater operation manipulator of “Jiaolong”[J]. Ship & Ocean Engineering, 2018, 47(5): 105-109.
|
| [109] |
LI H, LI B, ZHANG K, et al. Design and application of operation and maintenance system for “Shen Hai Yong Shi” manned submersible[J]. Ship Science and Technology, 2022, 44(22): 182-185.
|
| [110] |
杨农林, 茅及愚, 向忠祥. 国外水下作业机械手的特点及发展趋势[J]. 海洋科学, 1990, 6(6): 67-69.
|
| [111] |
KOCH J, LEICHTY J. Development of a robotic arm for mini-class ROV dexterous manipulation[C]//OCEANS 2019 MTS/IEEE Seattle. Seattle, WA, USA: IEEE, 2019: 1-5.
|
| [112] |
吕荣贤, 陈巍, 郭铁铮, 等. 基于改进RRT算法的水下机械臂路径规划研究[J]. 工业控制计算机, 2025, 38(5): 83-86.
LÜ R X, CHEN W, GUO T Z, et al. Path planning of underwater robotic arm based on improved RRT algorithm[J]. Industrial Control Computer, 2025, 38(5): 83-86.
|
| [113] |
XUE F, FAN Y, ZHANG X, et al. Kinematic control of a cable-driven snake-like manipulator for deep-water[J]. Journal of Mechanical & Electrical Engineering, 2023, 40(4): 522-529.
|
| [114] |
OCEANNEWS & TECHNOLOGY. Tentacle-like underwater robot to make offshore inspections safer and more precise[EB/OL]. (2025-09-03)[2025-09-08]. https://oceannews.com/news/subsea-and-survey/tentacle-like-underwater-robot-to-make-offshore-inspections-safer-and-more-precise/.
|
| [115] |
ROESTHUIS R J, MISRA S. Steering of multisegment continuum manipulators using rigid-link modeling and fbg-based shape sensing[J]. IEEE Transactions on Robotics, 2016, 32(2): 372-382. doi: 10.1109/TRO.2016.2527047
|
| [116] |
ROESTHUIS R J, KEMP M, VAN D J J, et al. Three-dimensional needle shape reconstruction using an array of fiber bragg grating sensors[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(4): 1115-1126. doi: 10.1109/TMECH.2013.2269836
|
| [117] |
LAI W, CAO L, LIU J, et al. A three-axial force sensor based on fiber bragg gratings for surgical robots[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(2): 777-789. doi: 10.1109/TMECH.2021.3071437
|
| [118] |
乔鑫宇. 空间仿生柔性机械臂动力学建模与控制研究[D]. 辽宁: 大连理工大学, 2023.
|
Figures(11) / Tables(1)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro



 DownLoad:
DownLoad: