- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
| Citation: | ZHONG Shuqiao, SONG Chaoyang, ZHOU Zhiyuan, WAN Fang, LIN Jian. Underwater Adaptive End Effector Based on Biomimetic Grasping Mechanism of Soft-Rigid Gripper[J]. Journal of Unmanned Undersea Systems, 2025, 33(5): 818-825. doi: 10.11993/j.issn.2096-3920.2025-0092

|

| [1] |
LIU Y, ZHANG J, XIANG X, et al. Design, implementation and verification of hardware-in-the-loop control system for work-class ROVs[J]. Ocean Engineering, 2024, 313: 119605. doi: 10.1016/j.oceaneng.2024.119605
|
| [2] |
MAZZEO A, AGUZZI J, CALISTI M, et al. Marine robotics for deep-sea specimen collection: A systematic review of underwater grippers[J]. Sensors 2022, 22(2): 648.
|
| [3] |
SIVČEV S, COLEMAN J, OMERDIĆ E, et al. Underwater manipulators: A review[J]. Ocean Engineering, 2018, 163: 431-450. doi: 10.1016/j.oceaneng.2018.06.018
|
| [4] |
ZHANG Y, KONG D, SHI Y, et al. Recent progress on underwater soft robots: Adhesion, grabbing, actuating, and sensing[J]. Frontiers in Bioengineering and Biotechnology, 2023, 11: 1196922. doi: 10.3389/fbioe.2023.1196922
|
| [5] |
STUART H S, WANG S, CUTKOSKY M R. Tunable contact conditions and grasp hydrodynamics using gentle fingertip suction[J]. IEEE Transactions on Robotics, 2019, 35(2): 295-306. doi: 10.1109/TRO.2018.2880094
|
| [6] |
LICHT S, COLLINS E, MENDES M L, et al. Stronger at depth: Jamming grippers as deep sea sampling tools[J]. [J]. Soft Robotics, 2017, 4(4): 305-316. doi: 10.1089/soro.2017.0028
|
| [7] |
SUN J, ZHANG Q, LU Y, et al. A review of touching-based underwater robotic perception and manipulation[J]. Machines, 2025, 13(1): 41. doi: 10.3390/machines13010041
|
| [8] |
李原正, 王天润, 关堂镇, 等. 基于液态金属型摩擦纳米发电的水下仿生触须传感器[J]. 水下无人系统学报, 2024, 32(5): 794-800.
LI Y Z, WANG T R, GUAN T Z, et al. Underwater biomimetic whisker sensor based on liquid metal and triboelectric nanogenerator[J]. Journal of Unmanned Undersea Systems, 2024, 32(5): 794-800.
|
| [9] |
WU M, ZHENG X, LIU R, et al. Glowing sucker octopus (stauroteuthis syrtensis)-inspired soft robotic gripper for underwater self-adaptive grasping and sensing[J]. [J]. Advanced Science, 2022, 9(17): 2104382. doi: 10.1002/advs.202104382
|
| [10] |
XU P, LIU J, LIU X, et al. A bio-inspired and self-powered triboelectric tactile sensor for underwater vehicle perception[J]. npj Flexible Electronics, 2022, 6(1): 25. doi: 10.1038/s41528-022-00160-0
|
| [11] |
LIU S, ZHANG D, FU X, et al. Tactile sensing for soft robotic manipulators in 50 MPa hydrostatic pressure environments[J]. Advanced Intelligent Systems, 2023, 5(12): 2300296. doi: 10.1002/aisy.202300296
|
| [12] |
JI H, LAN Y, NIE S, et al. Development of an anthropomorphic soft manipulator with rigid-flexible coupling for underwater adaptive grasping[J]. Soft Robotics, 2023, 10(6): 1070-1082. doi: 10.1089/soro.2022.0215
|
| [13] |
VAR S C, JOVANOVA J. Design of a soft underwater gripper with SMA actuation[C]//ASME 2023 Conference on Smart Materials, Adaptive Structures and Intelligent Systems(ASME). Austin, Texas, USA: ASME, 2023: 111702.
|
| [14] |
WU M, AFRIDI W H, WU J, et al. Octopus-inspired underwater soft robotic gripper with crawling and swimming capabilities[J]. Research, 2024, 7: 456. doi: 10.34133/research.0456
|
| [15] |
GUO N, HAN X D, ZHONG S Q, et al. Proprioceptive state estimation for amphibious tactile sensing[J]. IEEE Transactions on Robotics, 2024, 40: 4662-4676 . doi: 10.1109/TRO.2024.3463509
|
| [16] |
GUO N, HAN X, LIU X, et al. Autoencoding a soft touch to learn grasping from on-land to underwater[J]. Advanced Intelligent Systems, 2024, 6(1): 2300382. doi: 10.1002/aisy.202300382
|
| [17] |
LIU X, HAN X, HONG W, et al. Proprioceptive learning with soft polyhedral networks[J]. International Journal of Robotics Research, 2024, 43(12): 1916-1935. doi: 10.1177/02783649241238765
|
| [18] |
WU T, DONG Y, LIU X, et al. Vision-based tactile intelligence with soft robotic metamaterial[J]. Materials & Design, 2024, 238: 112629.
|
| [19] |
GALLOWAY K C, BECKER K P, PHILLIPS B, et al. Soft robotic grippers for biological sampling on deep reefs[J]. Soft robotics, 2016, 3(1): 23-33. doi: 10.1089/soro.2015.0019
|
| [20] |
SUO F, HUI X, HUA P, et al. A biomimetic rigid-soft hybrid underwater gripper with compliance, stability, precise control, and high load capacity[J]. IEEE Transactions on Robotics, 2025, 41: 3099-3112. doi: 10.1109/TRO.2025.3562458
|
| [21] |
KIM M, OH J, SON D. Layer-jamming soft gripper for improved stiffness control and underwater adhesion[J]. Extreme Mechanics Letters, 2025, 77: 102322. doi: 10.1016/j.eml.2025.102322
|
| [22] |
CHEN H, LI Y, XU P, et al. Octopus-inspired soft gripper with embedded triboelectric tactile sensor for underwater target recognition and grasp[J]. Nano Energy, 2025, 140: 111007. doi: 10.1016/j.nanoen.2025.111007
|
| [23] |
QU J, YUAN Q, LI Z, et al. All-in-one strain-triboelectric sensors based on environment-friendly ionic hydrogel for wearable sensing and underwater soft robotic grasping[J]. Nano Energy, 2023, 111: 108387. doi: 10.1016/j.nanoen.2023.108387
|
| [24] |
SONG Z, WANG Z, LIU B, et al. A soft gripper based on PneuNets structure with stiffness-variable-enhanced load capacity for object grasping[J]. Sensors and Actuators A: Physical, 2025, 383: 116253. doi: 10.1016/j.sna.2025.116253
|
| [25] |
SUBAD R A S I, CROSS L B, PARK K. Soft robotic hands and tactile sensors for underwater robotics[J]. Applied Mechanics, 2021, 2(2): 356-382. doi: 10.3390/applmech2020021
|
| [26] |
常宗瑜, 张扬, 郑方圆, 等. 水下机器人-机械手系统研究进展: 结构、建模与控制[J]. 机械工程学报, 2020, 56(19): 53-69. doi: 10.3901/JME.2020.19.053
CHANG Z Y, ZHANG Y, ZHENG F Y, et al. Research progress of underwater vehicle-manipulator systems: Configuration, modeling and control[J]. Journal of Mechanical Engineering, 2020, 56(19): 53-69. doi: 10.3901/JME.2020.19.053
|
| [27] |
ZAREBIDOKI M, DHUPIA J S, LIAROKAPIS M, et al. A cable-driven underwater robotic system for delicate manipulation of marine biology samples[J]. Journal of Field Robotics, 2024, 41(8): 2615-2629. doi: 10.1002/rob.22381
|
| [28] |
SAKAGAMI N, TAKEUCHI K, KOGANEZAWA K. Numerical and experimental testing of underwater gripper with adjustable stiffness joints[C]//2020 IEEE/SICE International Symposium on System Integration(SII). Honolulu, HI, USA: IEEE, 2020: 1118-1122.
|
| [29] |
TEOH Z E, PHILLIPS B T, BECKER K P, et al. Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms[J]. Science Robotics, 2018, 20(3): 5276.
|
| [30] |
LI G, WONG T W, SHIH B, et al. Bioinspired soft robots for deep-sea exploration[J]. Nature Communications, 2023, 14(1): 7097. doi: 10.1038/s41467-023-42882-3
|
| [31] |
SINATRA N R, TEEPLE C B, VOGT D M, et al. Ultragentle manipulation of delicate structures using a soft robotic gripper[J]. Science Robotics, 2019, 4(33): 5425. doi: 10.1126/scirobotics.aax5425
|
| [32] |
熊啸. 水下软体机器人仿生结构设计和研究[D]. 哈尔滨: 哈尔滨工程大学, 2024.
|
| [33] |
STUART H, WANG S, KHATIB O, et al. The ocean one hands: An adaptive design for robust marine manipulation[J]. The International Journal of Robotics Research, 2017, 36(2): 150-166. doi: 10.1177/0278364917694723
|
| [34] |
MUSCOLO G G, MORETTI G, CANNATA G. SUAS: A novel soft underwater artificial skin with capacitive transducers and hyperelastic membrane[J]. Robotica, 2019, 37(4): 756-777. doi: 10.1017/S0263574718001315
|
| [35] |
ZHANG J, HAN P, LIU Q, et al. The design of underwater tactile force sensor with differential pressure structure and backpropagation neural network calibration[J]. Measurement and Control, 2024, 57(2): 124-138. doi: 10.1177/00202940231194116
|
| [36] |
郭力楠. 基于压电式仿海豹胡须传感器的水下目标尾流感知技术研究[D]. 大连: 大连海事大学, 2024.
|
| [37] |
TIAN L, FU W Y, LEI C H, et al. Chapter 1-current status of anti-EGFR agents[M]//SHI H. Novel Sensitizing Agents for Therapeutic Anti-EGFR Antibodies, New York: Academic Press. 2023:1-12.
|
| [38] |
MERIBOUT M, ABULE T N, DEREGE O, et al. Tactile sensors: A review[J]. Measurement, 2024, 238: 115332. doi: 10.1016/j.measurement.2024.115332
|
| [39] |
SUBAD R A, SAIKOT M M, PARK K. Soft multi-directional force sensor for underwater robotic application[J] . Sensors, 2022; 22(10): 3850.
|
| [40] |
KAMPMANN P, BÜSKENS C, WANG S, et al. Adaptive control for underwater gripping systems[M]. AI Technology for Underwater Robots. Berlin: Springer, 2019.
|
| [41] |
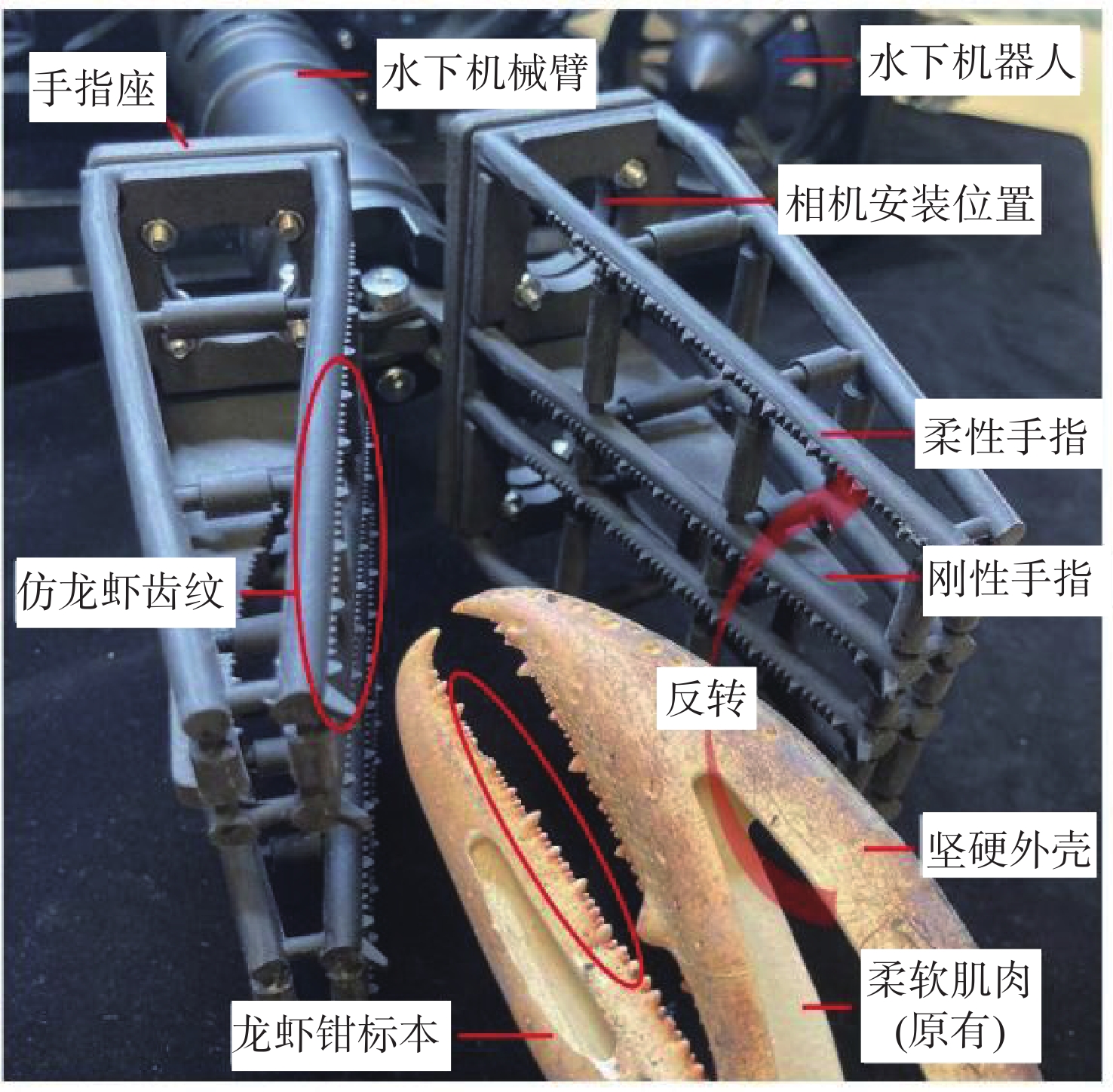
JIANG H, HAN X, JING Y, et al. Rigid-soft interactive design of a lobster-inspired finger surface for enhanced grasping underwater[J]. Frontiers in Robotics and AI, 2021, 8: 78717.
|
Figures(5) / Tables(1)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro



 DownLoad:
DownLoad: