- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
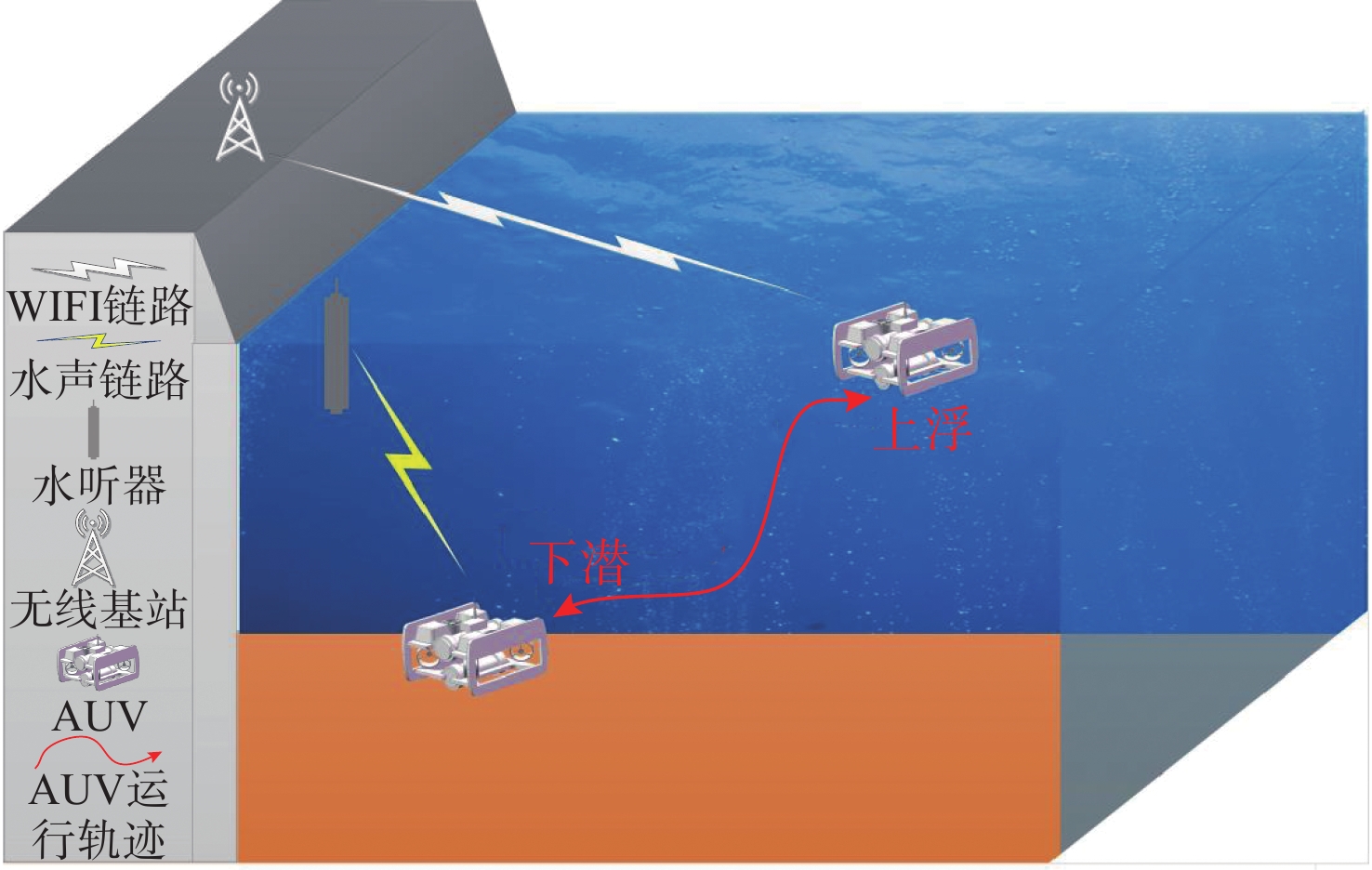
| Citation: | ZHANG Meng, WEI Bowen, JIN Junhao, TONG Feng, ZHANG Fumin. AUV with Underwater Acoustic-WIFI Link Cooperative Control for Confined Waters[J]. Journal of Unmanned Undersea Systems, 2025, 33(1): 56-64. doi: 10.11993/j.issn.2096-3920.2024-0117

|

| [1] |
BROWN H C, LAWRENCE M S, SLOAT J V, et al. Toward longitudinal reef health monitoring in the Florida keys national marine sanctuary using Iver AUVs[C]//OCEANS 2019 MTS/IEEE SEATTLE. Seattle, USA: IEEE, 2019: 1-7.
|
| [2] |
GALLIMORE E, TERRILLl E, HESS R, et al. Integration and evaluation of a next-generation chirp-style sidescan sonar on the REMUS 100[C]//IEEE/OES Autonomous Underwater Vehicle Workshop. Piscataway, USA: IEEE, 2018: 1-6.
|
| [3] |
KUKULYA A, PLUEDDEMANN A, AUSTIN T, et al. Under-ice operations with a REMUS-100 AUV in the Arctic[C]//IEEE/OES Autonomous Underwater Vehicles. Piscataway, USA: IEEE, 2010: 1-8.
|
| [4] |
UNDERWOODd A, MUEPHY C. Design of a micro-AUV for autonomy development and multi-vehicle systems[C]//OCEANS 2017-Aberdeen. Aberdeen, UK: OCEANS, 2017: 1-6.
|
| [5] |
RANDENI P S A T, RYPKEMA N R, FISCHELL E M, et al. Implementation of a hydrodynamic model-based navigation system for a low-cost AUV fleet[C]//IEEE/OES Autonomous Underwater Vehicle Workshop. Piscataway, USA: IEEE, 2018: 1-6.
|
| [6] |
DUECKER D A, BAUSCHMANN N, HANSENn T, et al. Hippo CampusX—A hydrobatic open-source micro AUV for confined environments[C]//2020 IEEE/OES Autonomous Underwater Vehicles Symposium(AUV). NL, Canada: IEEE, 2020: 1-6.
|
| [7] |
RENNER C, HEITMANN J, STEINMETZ F, et al. Inexpensive, low-power communication and localization for underwater sensor networks and µAUVs[J]. Association for Computing Machinery, 2020, 16(2): 1550-4859.
|
| [8] |
BAEYENS W, GAO Y, et al. In situ measurements of micronutrient dynamics in open seawater show that complex dissociation rates may limit diatom growth[J]. Scientific reports, 2018, 8(1): 16125. doi: 10.1038/s41598-018-34465-w
|
| [9] |
CYR F, TEDETTI M, BESSON F, et al. A glider-compatible optical sensor for the detection of polycyclic aromatic hydrocarbons in the marine environment[J]. Technology Report, 2019, 6: 1-15.
|
| [10] |
BEGUERY L, LOSSENT J, TRICARICO R, et al. Mapping underwater noise, detection of ships and cetaceans using a SeaExplorer glider at a basin level: Feedback from the first 1000 km-long acoustic exploration of the western french mediterranean sea[J]. The Journal of the Acoustical Society of America, 2018, 144(3): 1807.
|
| [11] |
FOMMERVAULT O D, BESSON F, BEGUERY L, et al. Seaexplorer underwater glider: A new tool to measure depth-resolved water currents profiles[C]//OCEANS 2019-Marseille. Marseille, France: OCEANS, 2019: 1-6.
|
| [12] |
WENG Y, CHUN S, SRKIMORI Y, et al. Acousto-optic cooperative pointing, acquisition and tracking method for undersea laser communication[C]//OCEANS 2023. Limerick, Ireland: OCEANS, 2023: 1-4.
|
| [13] |
TAO Q, ZHOU Y, TONG F, et al. Evaluating acoustic communication performance of micro AUV in confined space[C]//2018 OCEANS-MTS/IEEE Kobe Techno-Oceans(OTO). Kobe, Japan: IEEE, 2018: 1-6.
|
| [14] |
沈亚鹏. 受限水域KCS集装箱船岸壁效应数值研究[D]. 杭州: 浙江海洋大学, 2022.
|
| [15] |
曾一凡, 李晖. 扩频通信原理[M]. 北京: 机械工业出版社, 2005.
|
| [16] |
荆帅. 水下机器人动力装置设计与运动控制研究[D]. 沈阳: 沈阳工业大学, 2022.
|
| [17] |
TP-LINK. TL-XDN8180 1.0 产品介绍[EB/OL]. (2024-01-09)[2024-01-09]. https://resource.tp-link.com.cn/pc/docCenter/showDoc?id=1649854043758582.
|
| [18] |
童峰, 周跃海, 陈东升, 等. 异构无人潜水器水声通信技术发展综述[J]. 哈尔滨工程大学学报, 2023, 44(11): 1963-1976.
TONG F, ZHOU Y H, CHEN D S, et al. Advances and trends of underwater acoustic communication technology for heterogeneous unmanned underwater vehicles[J]. Journal of Harbin Engineering University, 2023, 44(11): 1963-1976.
|
Figures(19) / Tables(2)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: