- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
| Citation: | SHUI Xinhua, DUAN Fuhai. Seakeeping of Hydrofoil-Equipped Unmanned Surface VehicleBased on LQR and ZOA[J]. Journal of Unmanned Undersea Systems, 2025, 33(1): 65-73. doi: 10.11993/j.issn.2096-3920.2024-0083

|

| [1] |
万接喜. 外军无人水面艇发展现状与趋势[J]. 国防科技, 2014, 35(5): 91-96.
WAN J X. Development status and trend of foreign unmanned surface craft[J]. National Defense Science and Technology, 2014, 35(5): 91-96.
|
| [2] |
LÜ C, LU D, XIONG C, et al. Toward a gliding hybrid aerial underwater vehicle: design, fabrication, and experiments[J]. Journal of Field Robotics, 2022, 39(5): 543-556. doi: 10.1002/rob.22063
|
| [3] |
张刚, 孙晓晶. 襟翼形式对扑翼获能特性影响的对比分析[J]. 空气动力学学报, 2023, 41(5): 35-47. doi: 10.7638/kqdlxxb-2021.0412
ZHANG G, SUN X J. Comparative analysis of the effects of flap forms on energy acquisition characteristics of flapping wings[J]. Chinese Journal of Aerodynamics, 2023, 41(5): 35-47. doi: 10.7638/kqdlxxb-2021.0412
|
| [4] |
TELLO M, SILVA S, SOARES C G. Seakeeping performance of fishing vessels in irregular waves[J]. Ocean Engineering, 2011, 38(5-6): 763-773. doi: 10.1016/j.oceaneng.2010.12.020
|
| [5] |
KUDINOV Y I, PASHCHENKO F F, KELINA A Y, et al. Analysis of control system models with conventional LQR and fuzzy LQR controller[C]//13th International Symposium on Intelligent Systems(INTELS). St Petersburg Electrotechn Univ LETI. St Petersburg, Russia: INTELS, 2019, 150: 737-742.
|
| [6] |
PRIYATMADI, SANDIWAN A P, WIJAYA H, et al. Application of SPSA LQR tuning on quadrotor[C]//6th International Annual Engineering Seminar(InAES). Yogyakarta, Indonesia: IEEE, 2016, (54): 32-36.
|
| [7] |
TROJOVSKÁ E, DEHGHANI M, TROJOVSKY P. Zebra optimization algorithm: A new bio-inspired optimization algorithm for solving optimization algorithm[J]. IEEE Access, 2022(10): 49445-49473.
|
| [8] |
王鹏飞, 杜忠华, 牛坤, 等. 基于改进粒子群算法的倒立摆LQR优化控制[J]. 计算机仿真, 2021, 38(2): 220-224, 272. doi: 10.3969/j.issn.1006-9348.2021.02.048
WANG P F, DU Z H, NIU K, et al. LQR optimization control of inverted pendulum based on improved particle swarm optimization algorithm[J]. Computer Simulation, 2021, 38(2): 220-224, 272. doi: 10.3969/j.issn.1006-9348.2021.02.048
|
| [9] |
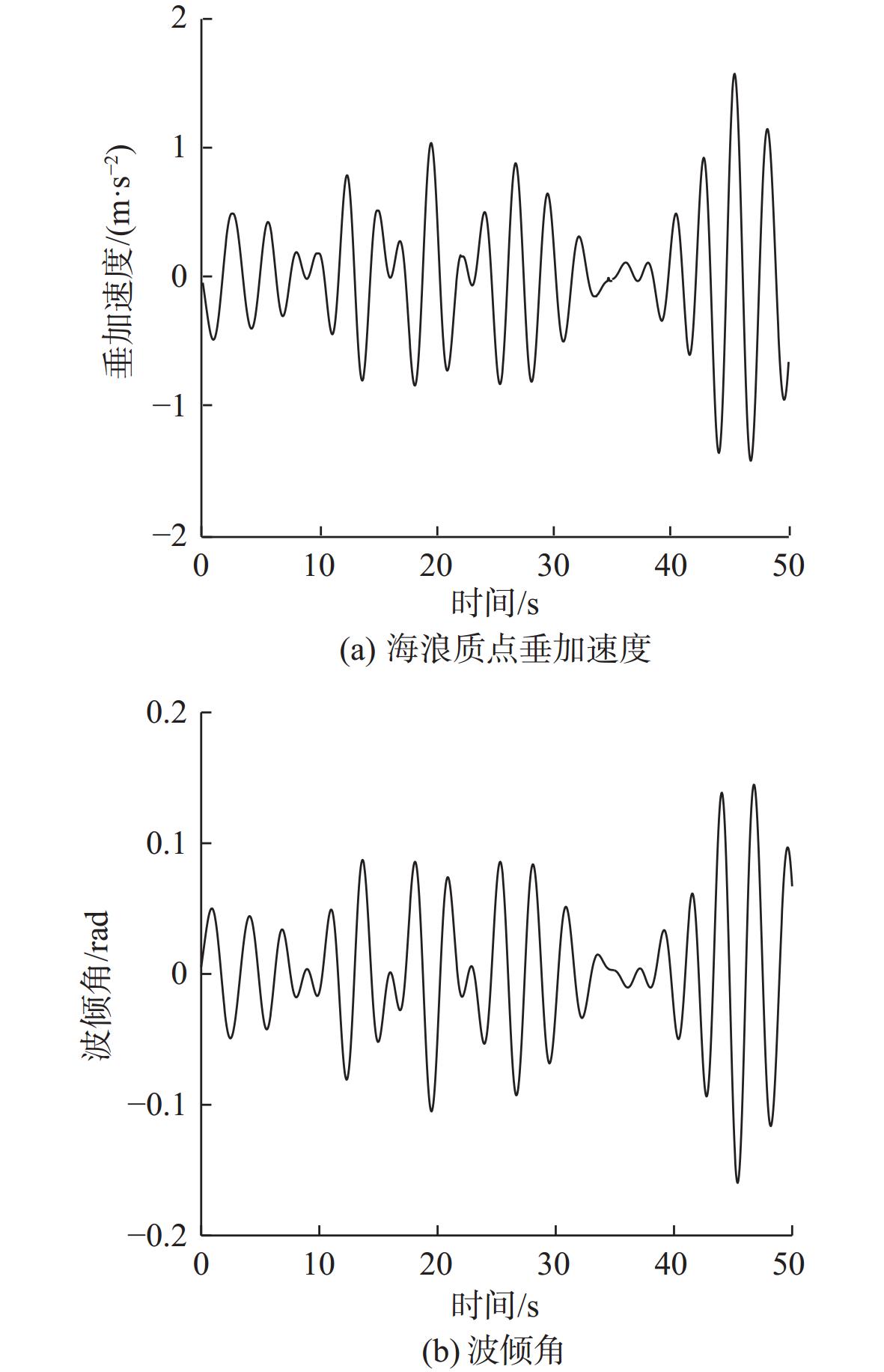
郭惜久, 程翔. 随机海浪模型仿真[J]. 兵器装备工程学报, 2010, 31(8): 134-136. doi: 10.3969/j.issn.1006-0707.2010.08.044
GUO X J, CHENG X. Random ocean wave model simulation[J]. Journal of Ordnance Equipment Engineering, 2010, 31(8): 134-136. doi: 10.3969/j.issn.1006-0707.2010.08.044
|
| [10] |
任俊生. 高速水翼船运动控制[M]. 北京: 科学出版社, 2015.
|
| [11] |
胡寿松. 自动控制原理[M]. 北京: 科学出版社, 2019.
|
| [12] |
李进富. 大风浪中船舶“Z”字航法探讨[C]//中国航海学会2006年学术年会. 中国, 广州: 广州远洋运输公司, 2006: 158-164.
|
Figures(7) / Tables(2)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: