- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
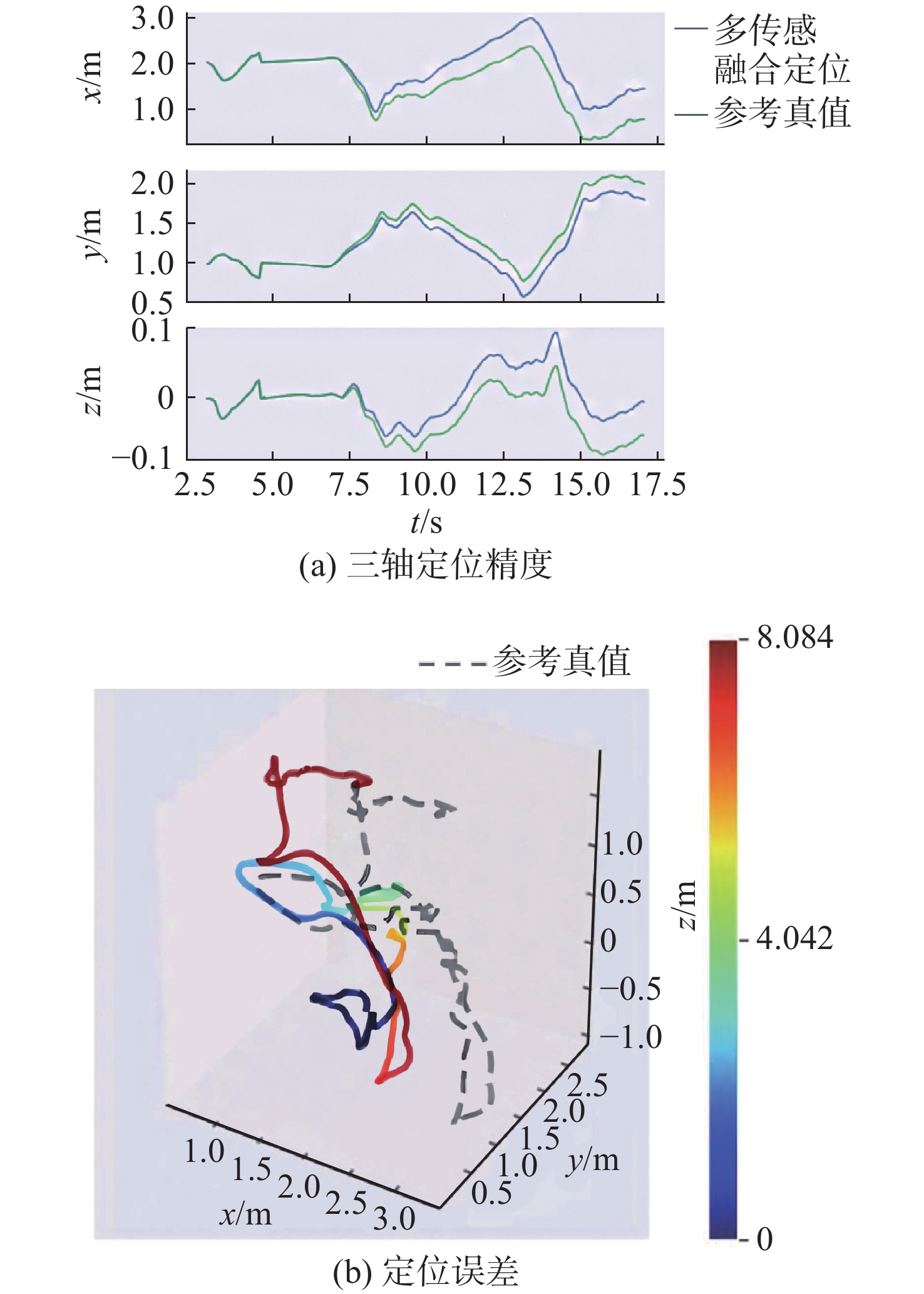
| Citation: | ZHANG Jian, HU Qiao, XIA Yin, SHI Lin, LI Yangyang. Underwater Positioning Method Based on Vision-Inertia-Pressure Fusion[J]. Journal of Unmanned Undersea Systems, 2025, 33(1): 99-107. doi: 10.11993/j.issn.2096-3920.2024-0061

|

| [1] |
WANG Y, MA X, WANG J, et al. Pseudo-3D vision-inertia based underwater self-localization for AUVs[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 7895-7907. doi: 10.1109/TVT.2020.2993715
|
| [2] |
SMITHANIK J R, ATKINS E M, SANNER R M. Visual positioning system for an underwater space simulation environment[J]. Journal of Guidance, Control, and Dynamics, 2016, 29(4): 858-869.
|
| [3] |
CHENG C, WANG C, YANG D, et al. Underwater localization and mapping based on multi-beam forward looking sonar[J]. Frontiers in Neurorobotics, 2022, 15: 801956. doi: 10.3389/fnbot.2021.801956
|
| [4] |
SHEN Y, ZHAO C, LIU Y, et al. Underwater optical imaging: Key technologies and applications review[J]. IEEE Access, 2021, 9: 85500-85514. doi: 10.1109/ACCESS.2021.3086820
|
| [5] |
RAVEENDRAN S, PATIL M D, BIRAJDAR G K. Underwater image enhancement: A comprehensive review, recent trends, challenges and applications[J]. Artificial Intelligence Review, 2021, 54: 5413-5467. doi: 10.1007/s10462-021-10025-z
|
| [6] |
LI C, GUO C, REN W, et al. An underwater image enhancement benchmark dataset and beyond[J]. IEEE Transactions on Image Processing, 2019, 29: 4376-4389.
|
| [7] |
SHAUKAT N, LI A Q, REKLEITIS I. Svin2: An underwater slam system using sonar, visual, inertial, and depth sensor[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Macau: IEEE, 2019: 1861-1868.
|
| [8] |
WANG X, FAN X, SHI P, et al. An overview of key SLAM technologies for underwater scenes[J]. Remote Sensing, 2023, 15(10): 2496. doi: 10.3390/rs15102496
|
| [9] |
HU K, WANG T, SHEN C, et al. Overview of underwater 3D reconstruction technology based on optical images[J]. Journal of Marine Science and Engineering, 2023, 11(5): 949. doi: 10.3390/jmse11050949
|
| [10] |
LEUTENEGGER S, FURGALE P, RABAUD V, et al. Keyframe-based visual-inertial slam using nonlinear optimization[J]. Proceedings of Robotis Science and Systems, 2023, 51: 5213-5667.
|
| [11] |
QIN T, LI P, SHEN S. VINS-MOMO: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. doi: 10.1109/TRO.2018.2853729
|
| [12] |
MOURIKIS A I, ROUMELIOTIS S I. A multi-state constraint Kalman filter for vision-aided inertial navigation[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation. Roma, Italy: IEEE, 2017.
|
| [13] |
SIBLEY G, MATTHIES L, SUKHATME G. Sliding window filter with application to planetary landing[J]. J. Field Robot, 2019, 27(5): 587-608.
|
| [14] |
王霞, 左一凡. 视觉SLAM研究进展[J]. 智能系统学报, 2020, 15(5): 825-834. doi: 10.11992/tis.202004023
WANG X, ZUO Y F. Advances in visual SLAM research[J]. CAAI Transactions on Intelligent Systems, 2020, 15(5): 825-834. doi: 10.11992/tis.202004023
|
| [15] |
MEI C, RIVES P. Single view point omnidirectional camera calibration from planar grids[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation. Roma, Italy: IEEE, 2007.
|
| [16] |
FERRERA M, CREUZE V, MORAS J, et al. AQUALOC: An underwater dataset for visual-inertial-pressure localization[J]. The International Journal of Robotics Research, 2019, 38(14): 1549-1559. doi: 10.1177/0278364919883346
|
| [17] |
LIN Y, GAO F, QIN T, et al. Autonomous aerial navigation using monocular visual inertial fusion[J]. Journal of Field Robot, 2017, 35: 23-51.
|
| [18] |
JIANG H, WANG W, SHEN Y, et al. Efficient planar pose estimation via UWB measurements[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023: 1954-1960.
|

Figures(11) / Tables(2)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: