- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
| Citation: | GAO Jian, HE Yaozhen, CHEN Yimin, ZHANG Yuanxu, YANG Xubo, LI Yufeng, ZHANG Zhenchi. Review of Visual Control Technology for Undersea Vehicles[J]. Journal of Unmanned Undersea Systems, 2024, 32(2): 282-294. doi: 10.11993/j.issn.2096-3920.2023-0061

|

| [1] |
邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关键技术分析[J]. 水下无人系统学报, 2023, 31(1): 1-9.
Qiu Zhiming, Ma Yan, Meng Xiangyao, et al. Analysis on the development trend and key technologies of unmanned underwater equipment[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 1-9.
|
| [2] |
张伟, 潘珺, 宫鹏, 等. 面向UUV回收过程的单目视觉导引灯阵跟踪方法[J]. 水下无人系统学报, 2021, 29(4): 435-441.
Zhang Wei, Pan Jun, Gong Peng, et al. Monocular vision guided lamp array tracking method for the UUV recovery process[J]. Journal of Unmanned Undersea Systems, 2021, 29(4): 435-441.
|
| [3] |
北林团子. 瑞典使用水下无人机 (ROV) 拍摄北溪天然气管道爆炸现场[EB/OL]. (2022-10-18) [2023-4-29]. https://www.bilibili.com/video/BV1Lm4y1P7H6/
|
| [4] |
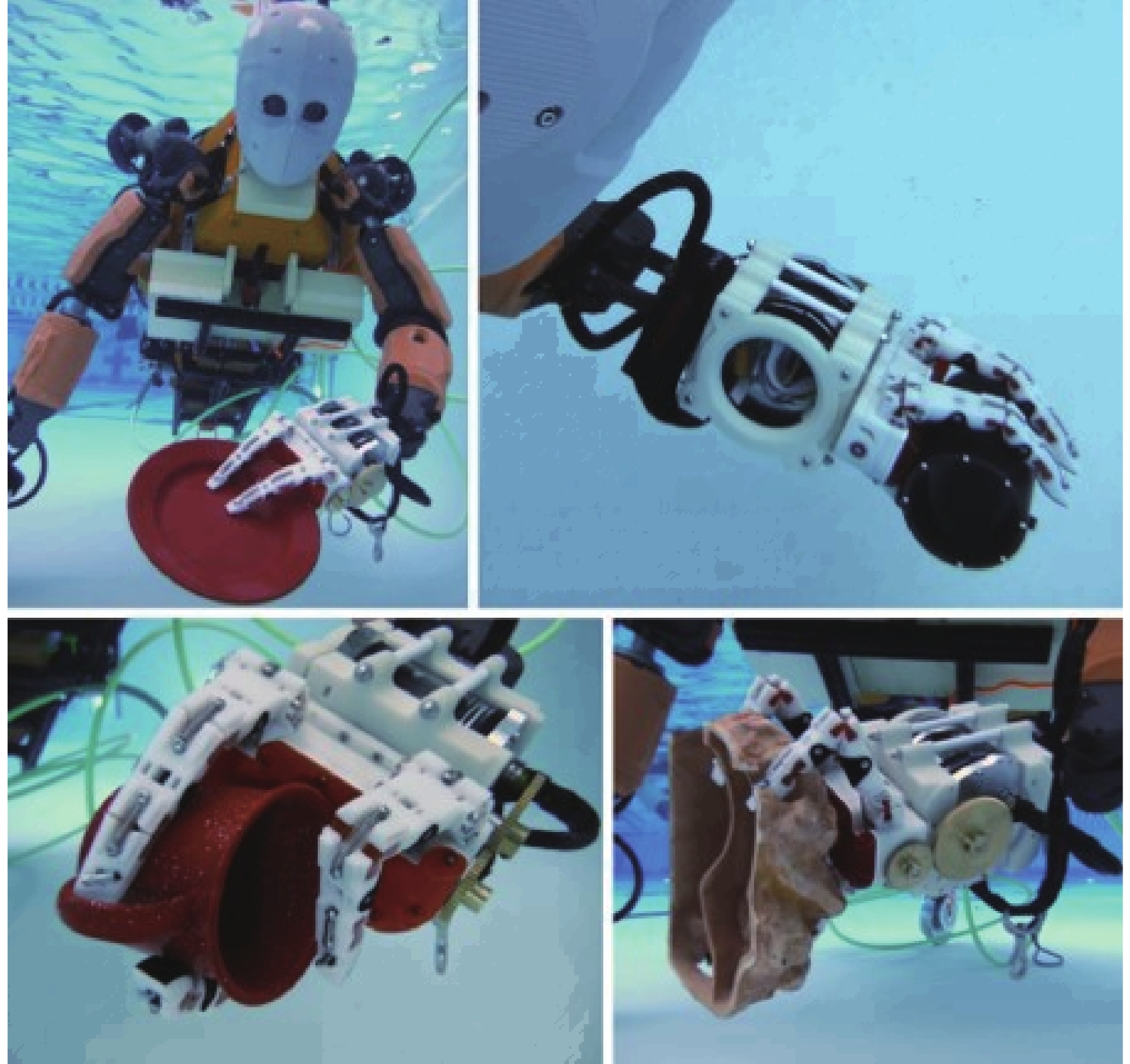
Brantner G, Khatib O. Controlling ocean one: Human–robot collaboration for deep-sea manipulation[J]. Journal of Field Robotics, 2021, 38(1): 28-51.
|
| [5] |
高剑, 张福斌. 无人水下航行器控制系统——建模、算法设计与开发[M]. 西安: 西北工业大学出版社, 2018.
|
| [6] |
孙叶义, 武皓微, 李晔, 等. 智能无人水下航行器水下回收对接技术综述[J]. 哈尔滨工程大学学报, 2019, 40(1): 5-15.
Sun Yeyi, Wu Haowei, Li Ye, et al. Summary of AUV underwater recycle docking technology[J]. Journal of Harbin Engineering University, 2019, 40(1): 5-15.
|
| [7] |
胡瀚文, 王猛, 程卫平, 等. 水下视觉SLAM的图像滤波除尘与特征增强算法[J]. 机器人, 2023, 45(2): 197-206.
Hu Hanwen, Wang Meng, Cheng Weiping, et al. An image dust-filtering and feature enhancement algorithm for underwater visual SLAM[J]. Robot, 2023, 45(2): 197-206.
|
| [8] |
郭继昌, 李重仪, 郭春乐, 等. 水下图像增强和复原方法研究进展[J]. 中国图象图形学报, 2017, 22(3): 273-287.
Guo Jichang, Li Chongyi, Guo Chunle, et al. Research progress of underwater image enhancement and restoration methods[J]. Journal of Image and Graphics, 2017, 22(3): 273-287.
|
| [9] |
奔粤阳, 汤瑞, 戴平安, 等. 基于加权融合的水下视觉图像增强算法[EB/OL]. (2022-9-14)[2023-4-29]. https://doi.org/10.13700/j.bh.1001-5965.2022.0540.
Ben Yueyang, Tang Rui, Dai Pingan, et al. Image enhancement algorithm for underwater vision based on weighted fusion[EB/OL]. (2022-9-14) [2023-4-29]. https://doi.org/10.13700/j.bh.1001-5965.2022.0540.
|
| [10] |
丛晓峰, 桂杰, 章军. 基于视觉Transformer的多损失融合水下图像增强网络[J]. 智能科学与技术学报, 2022, 4(4): 522-532.
Cong Xiaofeng, Gui Jie, Zhang Jun. Underwater image enhancement network based on visual transformer with multiple loss functions fusion[J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 522-532.
|
| [11] |
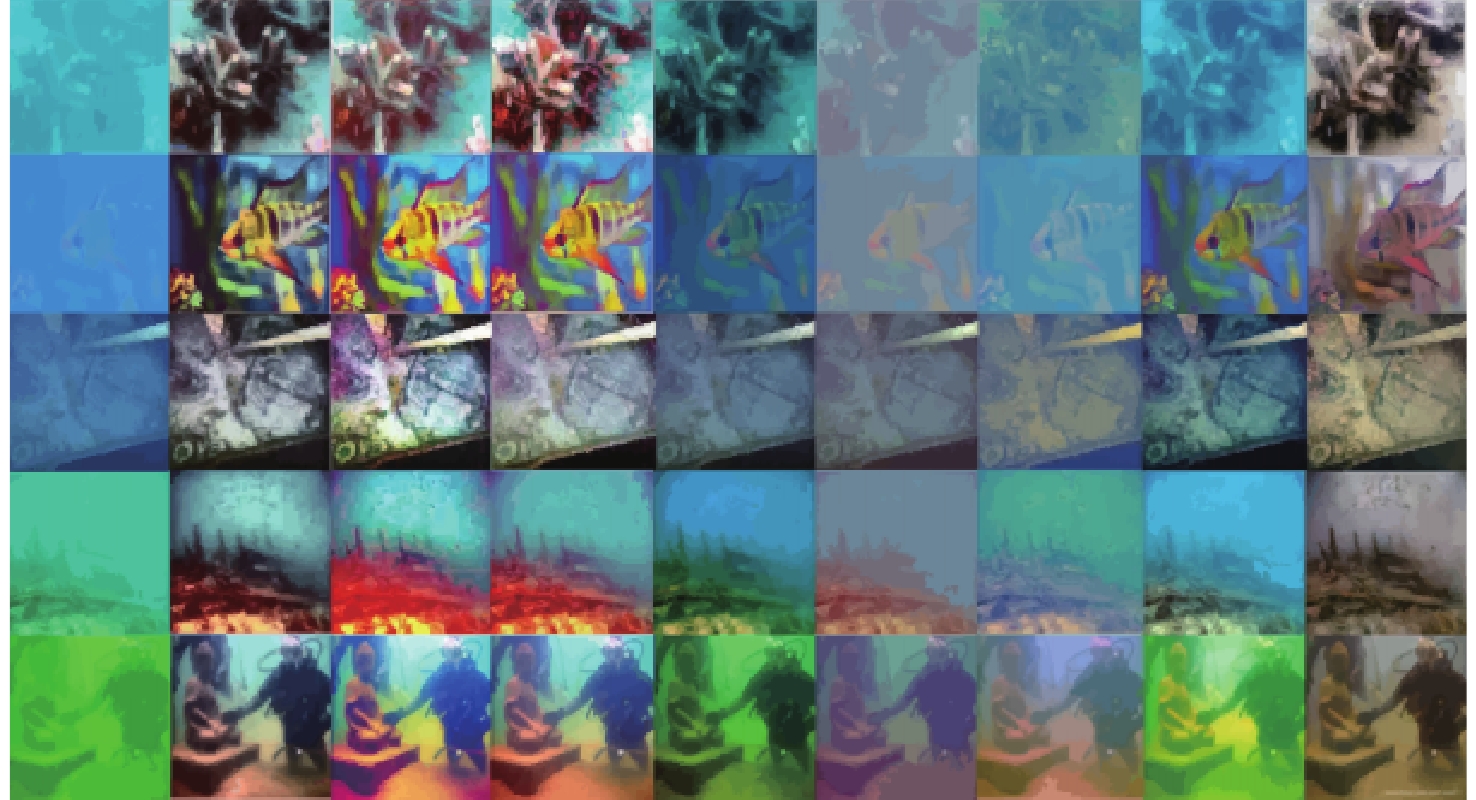
Li C Y, Guo C L, Ren W Q, et al. An underwater image enhancement benchmark dataset and beyond[J]. IEEE Transactions on Image Processing, 2020, 29: 4376-4389. doi: 10.1109/TIP.2019.2955241
|
| [12] |
Moghimi M K, Mohanna F. Real-time underwater image enhancement: A systematic review[J]. Journal of Real-Time Image Processing, 2021: 1-17.
|
| [13] |
刘皓轩, 林珊玲, 林志贤, 等. 基于GAN的轻量级水下图像增强网络[J]. 液晶与显示, 2023, 38(3): 378-386. doi: 10.37188/CJLCD.2022-0212
Liu Haoxuan, Lin Shanling, Lin Zhixian, et al. Lightweight underwater image enhancement network based on GAN[J]. Chinese Journal of Liquid Crystals and Displays, 2023, 38(3): 378-386. doi: 10.37188/CJLCD.2022-0212
|
| [14] |
石丹, 李庆武, 范新南, 等. 基于Contourlet变换和多尺度Rentinex的水下图像增强算法[J]. 激光与光电子学进展, 2010, 47(4): 41-45.
Shi Dan, Li Qingwu, Fan Xinnan, et al. Underwater image enhancement algorithm based on contourlet transform and nulti-scale Retinex[J]. Laser & Optoelectronics Progress, 2010, 47(4): 41-45.
|
| [15] |
许丽, 陆桂明, 邱贞光. 结合细节信息的自适应Retinex算法水下图像增强[J]. 计算机工程与应用, 2022, 58(11): 224-233.
Xu Li, Lu Guiming, Qiu Zhenguang. Adaptive Retinex algorithm based on detail selection used in underwater image enhancement[J]. Computer Engineering and Applications, 2022, 58(11): 224-233.
|
| [16] |
张彩珍, 康斌龙, 李颖, 等. 基于差异通道增益及改进Retinex的水下图像增强[J]. 激光与光电子学进展, 2021, 58(14): 156-163.
Zhang Caizhen, Kang Binlong, Li Ying, et al. Underwater image enhancement based on differential channel gainand improved Retinex[J]. Laser & Optoelectronics Progress, 2021, 58(14): 156-163.
|
| [17] |
金维维, 华臻, 冯巍巍, 等. 基于改进多尺度Retinex的水下图像增强研究[J]. 计算机应用与软件, 2021, 38(9): 239-243, 255.
Jin Weiwei, Hua Zhen, Feng Weiwei, et al. Research on underwater image enhancement based on improved multi-scale Retinex[J]. Computer Applications and Software, 2021, 38(9): 239-243, 255.
|
| [18] |
田宁, 程莉, 元海文, 等. 基于Retinex模型的水下图像增强方法[J]. 中国科技论文, 2022, 17(11): 1281-1288.
Tian Ning, Cheng Li, Yuan Haiwen, et al. Underwater image enhancement method based on Retinex model[J]. China Sciencepaper, 2022, 17(11): 1281-1288.
|
| [19] |
杨福豪, 史启超, 蓝方鸣, 等. 基于色彩衰减补偿和Retinex的水下图像增强[J]. 宁波大学学报(理工版), 2020, 33(1): 58-64.
|
| [20] |
Cai X W, Jiang N F, Chen W L, et al. CURE-Net: A cascaded deep network for underwater image enhancement[J]. IEEE Journal of Oceanic Engineering, 2024, 49(1): 226-236.
|
| [21] |
李耀, 于腾, 杨国为. 基于BcGAN的水下图像增强方法[J]. 计算机工程与设计, 2022, 43(11): 3195-3201.
Li Yao, Yu Teng, Yang Guowei. Underwater image enhancement method based on BcGAN[J]. Computer Engineering and Design, 2022, 43(11): 3195-3201.
|
| [22] |
李钰, 杨道勇, 刘玲亚, 等. 利用生成对抗网络实现水下图像增强[J]. 上海交通大学学报, 2022, 56(2): 134-142.
Li Yu, Yang Daoyong, Liu Lingya, et al. Underwater image enhancement based on generative adversarial networks[J]. Journal of Shanghai Jiaotong University, 2022, 56(2): 134-142.
|
| [23] |
李庆忠, 白文秀, 牛炯. 基于改进CycleGAN的水下图像颜色校正与增强[J]. 自动化学报, 2023, 49(4): 820-829.
Li Qingzhong, Bai Wenxiu, Niu Jiong. Underwater image color correction and enhancement based on improved Cycle-consistent Generative Adversarial Networks[J]. Acta Automatica Sinica, 2023, 49(4): 820-829.
|
| [24] |
林森, 刘旭. 门控融合对抗网络的水下图像增强[J]. 图学学报, 2021, 42(6): 948-956.
Lin Sen, Liu Xu. Underwater image enhancement algorithm using gated fusion generative adversarial network[J]. Journal of Graphics, 2021, 42(6): 948-956.
|
| [25] |
李耀, 于腾, 祁少华, 等. 基于CGAN的自适应密集特征融合水下图像增强算法[J]. 微电子学与计算机, 2021, 38(12): 31-38.
Li Yao, Yu Teng, Qi Shaohua, et al. Adaptived dense feature fusion underwater image enhancement algorithm based on CGAN[J]. Microelectronics & Computer, 2021, 38(12): 31-38.
|
| [26] |
晋玮佩, 郭继昌, 祁清. 基于条件生成对抗网络的水下图像增强[J]. 激光与光电子学进展, 2020, 57(14): 33-44.
Jin Weipei, Guo Jichang, Qi Qing. Underwater image enhancement based on conditional generative adversarial network[J]. Laser & Optoelectronics Progress, 2020, 57(14): 33-44.
|
| [27] |
林森, 刘世本, 唐延东. 多输入融合对抗网络的水下图像增强[J]. 红外与激光工程, 2020, 49(5): 217-225.
Lin Sen, Liu Shiben, Tang Yandong. Multi-input fusion adversarial network for underwater image enhancement[J]. Infrared and Laser Engineering, 2020, 49(5): 217-225.
|
| [28] |
方明, 刘小晗, 付飞蚺. 基于注意力的多尺度水下图像增强网络[J]. 电子与信息学报, 2021, 43(12): 3513-3521.
Fang Ming, Liu Xiaohan, Fu Feiran. Multi-scale underwater image enhancement network based on attention mechanism[J]. Journal of Electronics & Information Technology, 2021, 43(12): 3513-3521.
|
| [29] |
肖鹏, 王红茹. 一种用于局部低照度水下图像的自适应增强方法[J]. 激光杂志, 2022, 43(4): 114-119.
Xiao Peng, Wang Hongru. An adaptive enhancement method for underwater images with local low illumination[J]. Laser Journal, 2022, 43(4): 114-119.
|
| [30] |
Shi Y L, Gao Z R, Li S. Real-time detection algorithm of marine organisms based on improved YOLOv4-Tiny[J]. IEEE Access, 2022, 10: 131361-131373. doi: 10.1109/ACCESS.2022.3226886
|
| [31] |
Moghimi M K, Mohanna F. Reliable object recognition using deep transfer learning for marine transportation systems with underwater surveillance[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 2515-2524.
|
| [32] |
Sobolev A S, Chernyi S G, Krivoguz D O, et al. Convolution neural network for identification of underwater objects[C]//2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus). Saint Petersburg, Russian: IEEE, 2022: 455-458.
|
| [33] |
Tian M J, Li X L, Kong S H, et al. A modified YOLOv4 detection method for a vision-based underwater garbage cleaning robot[J]. Frontiers of Information Technology & Electronic Engineering, 2022, 23(8): 1217-1228.
|
| [34] |
Zhang J, Peng X H, Zhang G Y. Using improved YOLOX for underwater object recognition[C]//2022 5th International Conference on Pattern Recognition and Artificial Intelligence(PRAI). Chengdu, China: IEEE, 2022: 388-393.
|
| [35] |
Jian M W, Liu X Y, Luo H J, et al. Underwater image processing and analysis: A review[J]. Signal Processing: Image Communication, 2021, 91: 116088. doi: 10.1016/j.image.2020.116088
|
| [36] |
Zhou J Y, Xu T, Guo W T, et al. Underwater occlusion object recognition with fusion of significant environmental features[J]. Journal of Electronic Imaging, 2022, 31(2): 023016.
|
| [37] |
Rusli M A, Sari S, Taujuddin N S A M, et al. Contrast enhanced object recognition (CLAHE_YOLOv3) technique for clear and medium level turbidity lake underwater images[J]. Evolution in Electrical and Electronic Engineering, 2022, 3(2): 8-14.
|
| [38] |
陆地, 陈伟, 魏庆宇. 基于多深度对抗网络的ROV水下目标检测[J]. 计算机时代, 2023(4): 5-10.
Lu Di, Chen Wei, Wei Qingyu. Underwater image enhancement based on multi-scale adversarial network[J]. Computer Era, 2023(4): 5-10.
|
| [39] |
Ma Z W, Li H J, Wang Z H, et al. An underwater image semantic segmentation method focusing on boundaries and a real underwater scene semantic segmentation dataset[J/OL]. ArXivPreprint(2021-08-26)[2023-6-20]. https://arxiv.org/abs/2108.11727.
|
| [40] |
王非, 王欣宇, 周景春, 等. 一种基于YOLOv3的水下声呐图像目标检测方法[J]. 电子与信息学报, 2022, 44(10): 3419-3426.
Wang Fei, Wang Xinyu, Zhou Jingchun, et al. An underwater object detection method for sonar image based on YOLOv3 model[J]. Journal of Electronics & Information Technology, 2022, 44(10): 3419-3426.
|
| [41] |
Ghosh S, Ray R, Vadali S R K, et al. Reliable pose estimation of underwater dock using single camera: a scene invariant approach[J]. Machine Vision and Applications, 2016, 27: 221-236. doi: 10.1007/s00138-015-0736-4
|
| [42] |
Lwin K N, Mukada N, Myint M, et al. Visual docking against bubble noise with 3-D perception using dual-eye cameras[J]. IEEE Journal of Oceanic Engineering, 2018, 45(1): 247-270.
|
| [43] |
Li Y L, Liu W D, Li L, et al. Vision-based target detection and positioning approach for underwater robots[J]. IEEE Photonics Journal, 2022, 15(1): 1-12.
|
| [44] |
Sapienza D, Govi E, Aldhaheri S, et al. Model-based underwater 6D pose estimation from RGB[J/OL]. ArXiv Preprint(2023-09-15)[2023-09-20]. https://arxiv.org/abs/2302.06821.
|
| [45] |
张淏酥, 王涛, 苗建明, 等. 水下无人航行器的研究现状与展望[J]. 计算机测量与控制, 2023, 31(2): 1-7, 40.
Zhang Haosu, Wang Tao, Miao Jianming, et al. Research status and prospect of underwater unmanned vehicles[J]. Computer Measurement & Control, 2023, 31(2): 1-7, 40.
|
| [46] |
Ghosh S, Ray R, Vadali S R K, et al. Reliable pose estimation of underwater dock using single camera: A scene invariant approach[J]. Machine Vision & Applications, 2016, 27(2): 221-236.
|
| [47] |
蔡迎波, 李德彪. 基于单目视觉的AUV水下定位方法[J]. 中国惯性技术学报, 2015, 23(4): 489-492.
Cai Yingbo, Li Debiao. AUV underwater positioning method based on monocular-vision[J]. Journal of Chinese Inertial Technology, 2015, 23(4): 489-492.
|
| [48] |
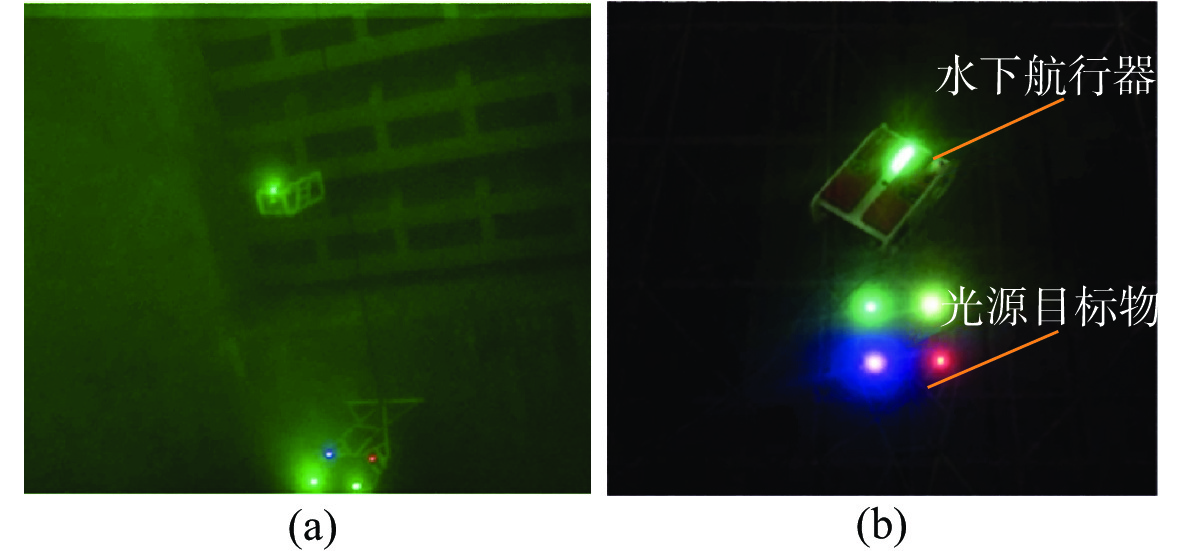
朱志鹏, 朱志宇. 一种基于双目视觉的水下导引光源检测和测距方法[J]. 水下无人系统学报, 2021, 29(1): 65-73.
Zhu Zhipeng, Zhu zhiyu. Method for detecting and ranging an underwater guided light source based on binocular vision[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 65-73.
|
| [49] |
杨翊, 周星群, 胡志强, 等. 基于视觉定位的水下机器人无通信高精度编队技术研究[J]. 数字海洋与水下攻防, 2022, 5(1): 50-58.
Yang Yi, Zhou Xingqun, Hu Zhiqiang, et al. Research on high-precision unmanned underwater vehicles team formation without communication based on visual positioning technology[J]. Digital Ocean & Underwater Warfare, 2022, 5(1): 50-58.
|
| [50] |
Evgeny I V, Margarita V S. Visual image based dynamical positioning using control laws with multipurpose structure - ScienceDirect[J]. IFAC-Papers On Line, 2015, 48(16): 184-189. doi: 10.1016/j.ifacol.2015.10.278
|
| [51] |
Vianna M L C. Real-time vision-aided inertial odometry for an AUV[D]. Brest: École Nationale Supérieure de Techniques Avancées Bretagne, 2019.
|
| [52] |
Tesei A, Micheli M, Vermeij A, et al. Real-time underwater positioning and navigation of an AUV in deep waters[C]//2018 OCEANS-MTS/IEEE Kobe Techno-Ocean (OTO). Kobe: IEEE, 2018: 1-7.
|
| [53] |
Ferrera M, Moras J, Trouve-Peloux P, et al. Real-time monocular visual odometry for turbid and dynamic underwater environments[J]. Sensors, 2019, 19(3): 687. doi: 10.3390/s19030687
|
| [54] |
Nishida Y, Sonoda T, Yasukawa S, et al. Underwater platform for intelligent robotics and its application in two visual tracking systems[J]. Journal of Robotics and Mechatronics, 2018, 30(2): 238-247. doi: 10.20965/jrm.2018.p0238
|
| [55] |
Gao J, Proctor A, Bradley C. Adaptive neural network visual servoing control for dynamic positioning of underwater vehicles[J]. Neurocomputing, 2015, 167: 604-613. doi: 10.1016/j.neucom.2015.04.028
|
| [56] |
Gao J, Proctor A, Shi Y, et al. Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control[J]. IEEE Transactions on Cybernetics, 2015, 40(10): 2323-2334.
|
| [57] |
Gao J, Wu P, Yang B, et al. Adaptive neural network control for visual servoing of underwater vehicles with pose estimation[J]. Journal of Marine Science and Technology, 2017, 22(3): 470-478. doi: 10.1007/s00773-016-0426-6
|
| [58] |
Figueiredo A B, Ferreira B M, Matos A C. Vision-based localization and positioning of an AUV[C]//Oceans 2016. Shanghai, China: IEEE, 2016: 1-7.
|
| [59] |
杨家铭, 潘悦, 王强, 等. 水下弱目标跟踪的深度学习方法研究[J]. 兵工学报, 2024, 45(2): 385-394.
Yang Jiaming, Pan Yue, Wang Qiang, et al. Research on deep learning method of underwater weak target tracking[J]. Acta Armamentarii, 2024, 45(2): 385-394.
|
| [60] |
韩泽凯, 朱兴华, 韩晓军, 等. 基于卷积神经网络目标跟踪的AUV回收视觉导引算法[J]. 水下无人系统学报, 2022, 30(6): 801-808.
Han Zekai, Zhu Xinghua, Han Xiaojun, et al. Visual guidance algorithm for AUV recovery based on CNN object tracking[J]. Journal of Unmanned Undersea Systems, 2022, 30(6): 801-808.
|
| [61] |
Sun C Y, Wan Z L, Hai H, et al. Intelligent target visual tracking and control strategy for open frame underwater vehicles[J]. Robotica, 2021, 39(10): 1791-1805. doi: 10.1017/S0263574720001502
|
| [62] |
Gao J, Wu P, Li T, et al. Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle[J]. Nonlinear Dynamics, 2017, 87(4): 1-13.
|
| [63] |
Gao J, An X M, Proctor A, et al. Sliding mode adaptive neural network control for hybrid visual servoing of underwater vehicles[J]. Ocean Engineering, 2017, 142: 666-675.
|
| [64] |
Liu J, Yan W, Gao J, et al. Hybrid vision/force control for underwater vehicles landing on unknown surfaces[J]. Ocean Engineering, 2022, 253(1): 111233.
|
| [65] |
Myint M, Yonemori K, Yanou A, et al. Visual servoing for underwater vehicle using dual-eyes evolutionary real-time pose tracking[J]. Journal of Robotics and Mechatronics, 2016, 28(4): 543-558. doi: 10.20965/jrm.2016.p0543
|
| [66] |
Kang H J, Cho G R, Kim M, et al. Mission management technique for multi-sensor-based AUV docking[J]. Journal of Ocean Engineering and Technology, 2022, 36(3): 181-193. doi: 10.26748/KSOE.2022.001
|
| [67] |
Yazdani A M, Sammut K, Yakimenko O, et al. A survey of underwater docking guidance systems[J]. Robotics and Autonomous systems, 2020, 124: 103382. doi: 10.1016/j.robot.2019.103382
|
| [68] |
Ye L, Jiang Y Q, Cao J, et al. AUV docking experiments based on vision positioning using two cameras[J]. Ocean Engineering, 2015, 110: 163-173. doi: 10.1016/j.oceaneng.2015.10.015
|
| [69] |
周船, 郝颖明, 吴清潇, 等. 基于约束运动水下机器人视觉悬停研究[J]. 仪器仪表学报, 2006(S3): 1840-1843.
Zhou Chuan, Hao Yingming, Wu Qingxiao, el al. Visual station keeping based on constrained motion for underwater robot[J]. Chinese Journal of Scientific Instrument, 2006(S3): 1840-1843.
|
| [70] |
Yahya M F , Arshad M R . Position-based visual servoing for underwater docking of an autonomous underwater vehicle[C]//2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS). Penang, Malaysia: IEEE, 2017.
|
| [71] |
Huang H, Bian X Y, Cai F C, et al. A review on visual servoing for underwater vehicle manipulation systems automatic control and case study[J]. Ocean Engineering, 2022, 260: 112065. doi: 10.1016/j.oceaneng.2022.112065
|
| [72] |
Liu S, Xu H, Lin Y, et al. Visual navigation for recovering an AUV by another AUV in shallow water[J]. Sensors, 2019, 19(8): 1889. doi: 10.3390/s19081889
|
| [73] |
Singh P, Gregson E, Ross J, et al. Vision-based AUV docking to an underway dock using convolutional neural net-works[C]//2020 IEEE/OES Autonomous Underwater Vehicles Symposium. St. Johns, Canada: IEEE, 2020:1-6.
|
| [74] |
Wang T L, Zhao Q C, Yang C J. Visual navigation and docking for a planar type AUV docking and charging system[J]. Ocean Engineering, 2021, 224: 108744. doi: 10.1016/j.oceaneng.2021.108744
|
| [75] |
Ren R Z, Zhang L C, Liu L, et al. Two AUVs guidance method for self-reconfiguration mission based on monocular vision[J]. IEEE Sensors Journal, 2021, 21(8): 10082-10090. doi: 10.1109/JSEN.2020.3042306
|
| [76] |
Robert S, Brett W, McBride L, et al. Docking Control System for a 54-cm-Diameter (21-in) AUV[J]. IEEE Journal of Oceanic Engineering, 2009, 33(4): 550-562.
|
| [77] |
Wirtz M, Hildebrandt M. IceShuttle Teredo: An ice-penetrating robotic system to transport an exploration AUV into the ocean of Jupiter’s moon Europa[C]//67th International Astronautical Congress. Guadalajara, Mexico: ICA, 2016: 26-30.
|
| [78] |
Li B, Page B, Hoffman J, et al. Rendezvous planning for multiple AUVs with mobile charging stations in dynamic currents[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1653-1660. doi: 10.1109/LRA.2019.2896899
|
| [79] |
Zhang Y X, Gao J, Chen Y M, et al. Adaptive neural network control for visual docking of an autonomous underwater vehicle using command filtered backstepping[J]. International Journal of Robust and Nonlinear Control, 2022, 32(8): 4716-4738. doi: 10.1002/rnc.6051
|
| [80] |
张涛, 李德骏, 彭时林, 等. 基于视觉导引与旋转接驳的自主水下航行器末端入坞研究[J]. 机械工程学报, 2018, 54(20): 81-88. doi: 10.3901/JME.2018.20.081
Zhang Tao, Li Dejun, Peng Shilin, et al. Research on terminal docking of autonomous underwater vehicle based on visual guidance and rotational docking station[J]. Journal of Mechanical Engineering, 2018, 54(20): 81-88. doi: 10.3901/JME.2018.20.081
|
| [81] |
青岛市民网. 海洋试点国家实验室: 水下光学导引成功实现AUV对接[EB/OL]. (2019-06-22)[2023-4-27]. https://www.dailyqd.com/epaper/html/2019-07/03/content_254093.htm.
|
| [82] |
谢争明, 曾庆军, 朱志宇, 等. AUV自主对接回收动力定位控制系统设计与实现[J]. 软件导刊, 2021, 20(10): 169-173.
Xie Zhengming, Zeng Qingjun, Zhu Zhiyu, et al. Design and implementation of AUV autonomous docking recovery dynamic positioning control system[J]. Software Guide, 2021, 20(10): 169-173.
|
| [83] |
Kim T W, Marani G, Yuh J. Underwater vehicle manipulators[M]. Maryland:Springer Handbook of Ocean Engineering, 2016: 407-422.
|
| [84] |
Zhang W X, Xu H C,Ding X L, et al. Design and dynamic analysis of an underwater manipulator[C]//Proceedings of the 2015 Chinese lntelligent Automation Conference. Fuzhou, China: CIAC, 2015: 339-409
|
| [85] |
Cheng W, Zhou H Y, Liu G Q. Summary of control algorithm for underwater robot[C]//2020 5th International Conference on Mechanical, Control and Computer Engineering. Harbin, China: ICMCCE , 2020: 759-762.
|
| [86] |
王尧尧. 自治水下运载器—机械手系统协调控制研究[D]. 杭州: 浙江大学, 2016.
|
| [87] |
肖治琥. 深水机械手动力学特性及自主作业研究[D]. 武汉: 华中科技大学, 2011.
|
| [88] |
常宗瑜, 张扬, 郑方圆, 等. 水下机器人-机械手系统研究进展: 结构、建模与控制[J]. 机械工程学报, 2020, 56(19): 53-69. doi: 10.3901/JME.2020.19.053
Chang Zongyu, Zhang Yang, Zheng Fangyuan, et al. Research progress of underwater vehicle-manipulator systems: Configuration, modeling and control[J]. Journal of Mechanical Engineering, 2020, 56(19): 53-69. doi: 10.3901/JME.2020.19.053
|
| [89] |
香港科技大学. 科大水底机械人大赛向多元背景的年青人推动「STEAM教育」 [EB/OL].(2017-05-08)[2024-3-18]. https://hkust.edu.hk/zh-hans/news/stem-education/hkust-underwater-robot-competition-promotes-steam-education-youngsters-wide.
|
| [90] |
Ribas D, Palomeras N, Ridao P, et al. Girona 500 AUV: From survey to intervention[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(1): 46-53. doi: 10.1109/TMECH.2011.2174065
|
| [91] |
Barbalata C, Dunnigan M W, Petillot Y. Position/force operational space control for underwater manipulation[J]. Robotics and Autonomous Systems, 2018, 100: 150-159. doi: 10.1016/j.robot.2017.11.004
|
| [92] |
大连海事新闻网. 我校在2020年全国水下机器人大赛中喜获佳绩[EB/OL]. (2020-09-24)[2023-4-27]. https://news.dlmu.edu.cn/info/1021/16998.htm.
|
| [93] |
上海交通大学水下工程研究所. 上海交通大学教授朱继懋揭秘“海龙”号海底机器人 [EB/OL]. (2011-10-25)[2023-4-27]. https://underwater.sjtu.edu.cn/info/4446/11778.htm.
|
| [94] |
纪辉, 兰宇, 武子为, 等. 面向水下作业的水液压机械手研究与展望[J]. 机械工程学报, 2023, 59(4): 283-294. doi: 10.3901/JME.2023.04.283
Ji Hui, Lan Yu, Wu Ziwei, et al. Research progress and prospect of water hydraulic manipulator for underwater operation[J]. Journal of Mechanical Engineering, 2023, 59(4): 283-294. doi: 10.3901/JME.2023.04.283
|
| [95] |
杨妍, 刘志杰, 韩江涛, 等. 软体机械臂的驱动方式、建模与控制研究进展[J]. 工程科学学报, 2022, 44(12): 2124-2137.
Yang Yan, Liu Zhijie, Han Jiangtao, et al. Overview of actuators, modeling, and control methods for soft manipulators[J]. Chinese Journal of Engineering, 2022, 44(12): 2124-2137.
|
| [96] |
Chen X Q, Zhang X, Huang Y Y, et al. A review of soft manipulator research, applications, and opportunities[J]. Journal of Field Robotics, 2021, 39(3): 281-311.
|
| [97] |
Jin K, Choi H S, Nguyen N D, et al. Simulation and experimental validation for dynamic stability of underwater vehicle-manipulator system[C]//Oceans 2017-Anchorage. Anchorage, USA: Oceans, 2017: 1-5.
|
| [98] |
羊波, 王琨, 马祥祥, 等. 多智能体强化学习的机械臂运动控制决策研究[J]. 计算机工程与应用, 2023, 59(6): 318-325.
Yang Bo, Wang Kun, Mang Xiangxiang, et al. Research on motion control method of manipulator based on reinforcement learning[J]. Computer Engineering and Applications, 2023, 59(6): 318-325.
|
| [99] |
Gao J, Liang X M, Chen Y M, et al. Hierarchical image-based visual serving of underwater vehicle manipulator systems based on model predictive control and active disturbance rejection control[J]. Ocean Engineering, 2021, 229: 108814. doi: 10.1016/j.oceaneng.2021.108814
|
| [100] |
张子扬. 基于深度强化学习的水下机械臂抓取研究[D]. 合肥: 中国科学技术大学, 2020.
|
| [101] |
李煊. 基于双目视觉的水下目标图像处理与定位技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2018.
|
| [102] |
Zhang Z Y, Cong W, Zhang Q F, et al. Research on autonomous grasping control of underwater manipulator based on visual servo[C]//2019 Chinese Automation Congress. Hangzhou, China: IEEE, 2020: 2904-2910.
|
| [103] |
Yu W, Wang S, Wei Q P, et al. Development of an underwater manipulator and its free-floating autonomous operation[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(2): 815-824. doi: 10.1109/TMECH.2015.2494068
|
| [104] |
Zheng Z H, Xie J R, Tao S, et al. A novel remote control method oriented to underwater maninulators[C]//2021 IEEE International Conference on Mechatronics and Automation(ICMA). Takamatsu, Japan: IEEE, 2021: 843-848.
|
| [105] |
Wen Y Q, Gao J, Song Y X, et al. Motion planning for image-based visual servoing of an underwater vehicle-manipulator system in task-priority frameworks[C]//2022 IEEE 9th International Conference on Underwater System Technology: Theory and Applications(USYS). Kuala Lumpur, Malaysia: IEEE, 2022: 1-5.
|
| [106] |
Dai Y, Yu S H. Design of an indirect adaptive controller for the trajectory tracking of UVMS[J]. Ocean Engineering, 2018, 151: 234-245. doi: 10.1016/j.oceaneng.2017.12.070
|
| [107] |
Ma R C, Wang Y, Wang S, et al. Sample-observed soft actor-critic learning for path following of a biomimetic underwater vehicle[J]. IEEE Transactions on Automation Science and Engineering, 2023: 1-10.
|
| [108] |
Yu W, Cai M X, Wang S, et al. Development and control of an underwater vehicle-manipulator system propelled by flexible flippers for grasping marine organisms[J]. IEEE Transactions on Industrial Electronics, 2021, 69(4): 3898-3908.
|
| [109] |
Li H F, Xu J, Yu J Z. Discrete event-triggered fault-tolerant control of underwater vehicles based on takagi–sugeno fuzzy model[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 53(3): 1841-1851.
|
| [110] |
Moon J, Bae S H, Cashmore M. Meta reinforcement learning based underwater manipulator control[C]//2021 21st International Conference on Control, Automation and Systems(ICCAS). Jeju, Korea: IEEE, 2021: 1473-1476.
|
| [111] |
Li Y F, Gao J, Wang X X, et al. Depth camera based remote three-dimensional reconstruction using incremental point cloud compression[J]. Computers and Electrical Engineering, 2022, 99: 107767. doi: 10.1016/j.compeleceng.2022.107767
|

Figures(13)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: