- 中国科技核心期刊
- Scopus收录期刊
- DOAJ收录期刊
- JST收录期刊
- Euro Pub收录期刊
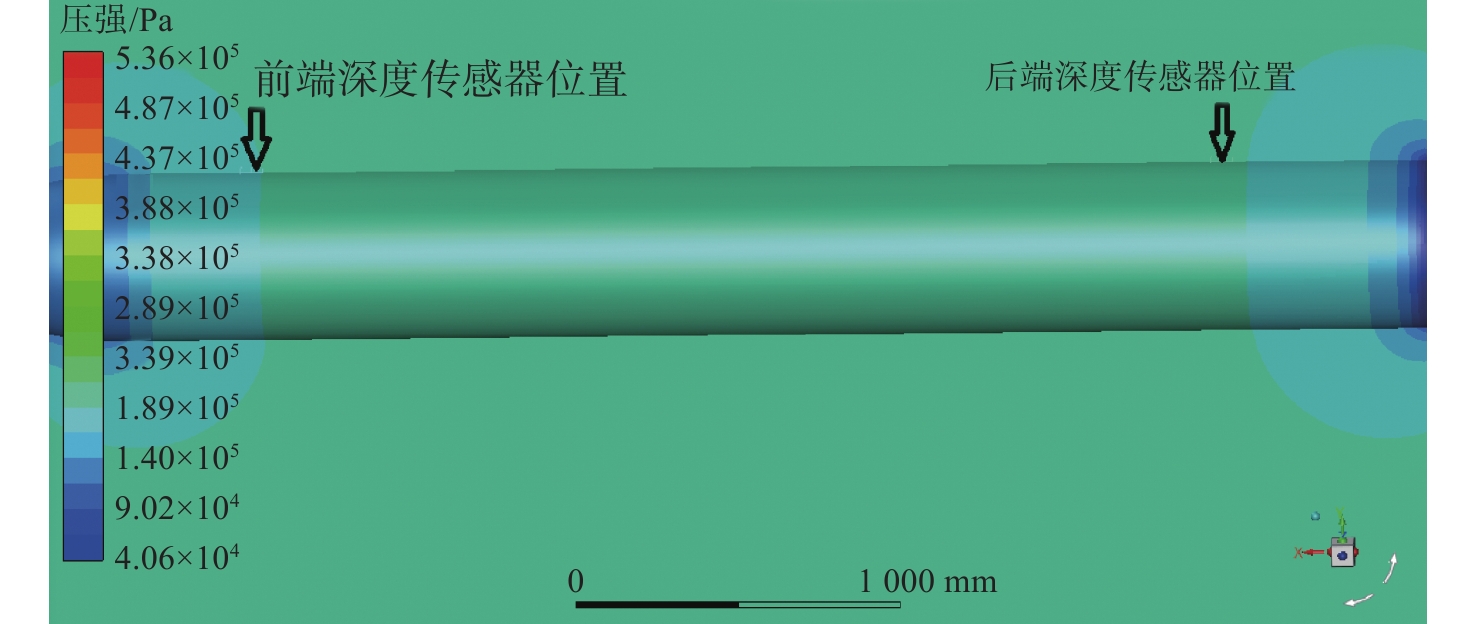
| Citation: | LI Hou-quan, FENG Xiao-tao, ZHANG Xiao-fang, ZHAO Zhi-bo. Research on Abnormal Ultra-shallow Shutdown of Undersea Vehicles[J]. Journal of Unmanned Undersea Systems, 2022, 30(4): 523-527. doi: 10.11993/j.issn.2096-3920.202112019

|

| [1] |
Dhanak M R, Xiros N I. Springer Handbook of Ocean Engineering[M]. New York: Springer International Publishing, 2016.
|
| [2] |
钟宏伟. 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(3): 215-225.
Zhong Hong-wei. Review and Prospect of Equipment and Techniques for Unmanned Undersea Vehicle in Foreign Countries[J]. 2017, 25(3): 215-225.
|
| [3] |
张安通, 徐令令, 王健, 等. 一种UUV智能应急安全控制自救系统设计[J]. 水下无人系统学报, 2019, 27(5): 548-554.
Zhang An-tong, Xu Ling-ling, Wang Jian, et al. Design of an Intelligent Emergency Safety Control Self-rescue System for UUV[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 548-554.
|
| [4] |
孙梦瑶, 刘玉红, 黄明龙, 等. 测量型深水AUV垂直面运动稳定性设计[J]. 机械科学与技术, 2016, 35(9): 1402-1407. doi: 10.13433/j.cnki.1003-8728.2016.0917
Sun Meng-yao, Liu Yu-hong, Huang Ming-long, et al. Design of Dynamic Stability in Vertical Plane of Autonomous Underwater Vehicle with Measurement Missions[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(9): 1402-1407. doi: 10.13433/j.cnki.1003-8728.2016.0917
|
| [5] |
高婷, 庞永杰, 王亚兴, 等. 水下航行器水动力系数计算方法[J]. 哈尔滨工程大学学报, 2019, 40(1): 174-180. doi: 10.11990/jheu.201709100
Gao Ting, Pang Yong-jie, Wang Ya-xing, et al. Calculation Method of Hydrodynamic Coefficients for Underwater Vehi- cles[J]. Journal of Harbin Engineering University, 2019, 40(1): 174-180. doi: 10.11990/jheu.201709100
|
| [6] |
袁常乐, 万德成. 不同雷诺数下圆柱流噪声分析[J]. 中国造船, 2020, 61(z2): 75-82. doi: 10.3969/j.issn.1000-4882.2020.z2.008
Yuan Chang-le, Wan De-cheng. Analysis of Underwater Radiation Noise of Cylinder at Different Reynolds Num- bers[J]. Shipbuilding of China, 2020, 61(z2): 75-82. doi: 10.3969/j.issn.1000-4882.2020.z2.008
|
| [7] |
严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005.
|
| [8] |
黄景泉, 张宇文. 航行器流体力学[M]. 西安: 西北工业大学出版社, 1989.
|
| [9] |
王在铎, 王威, 张孝石. 表面特性对水下航行器流体动力的影响研究[J]. 鱼雷技术, 2015, 23(5): 321-325.
Wang Zai-duo, Wang Wei, Zhang Xiao-shi. Influences of Surface Characteristcs of Underwater Vehicle on its Hydro- dynamic Properties[J]. Torpedo Technology, 2015, 23(5): 321-325.
|
| [10] |
章乐多. 水下航行器基础运动控制仿真研究[J]. 舰船电子工程, 2021, 41(3): 157-161. doi: 10.3969/j.issn.1672-9730.2021.03.038
Zhang Le-duo. Research of Simulation of UUV Basic Motion Control[J]. Ship Electronic Engineering, 2021, 41(3): 157-161. doi: 10.3969/j.issn.1672-9730.2021.03.038
|
| [11] |
吴乃龙, 吴超, 葛彤, 等. 基于鱼类体线感知机理的水下机器人水流场识别研究[J]. 机械工程学报, 2016, 52(13): 54-59. doi: 10.3901/JME.2016.13.054
Wu Nai-long, Wu Chao, Ge Tong, et al. Flow Recognition of Underwater Vehicle Based on the Perception Mechanism of Lateral Line[J]. Journal of Mechanical Engineering, 2016, 52(13): 54-59. doi: 10.3901/JME.2016.13.054
|
| [12] |
曹晓明, 魏勇, 衡辉, 等. 海流扰动下无人水下航行器的动态面反演轨迹跟踪控制[J]. 系统工程与电子技术, 2021, 43(6): 1664-1672.
Cao Xiao-ming, Wei Yong, Heng Hui, et al. Dynamic Surface Backstepping Trajectory Control of Unmanned Underwater Vellicles with Ocean Current Disturbances[J]. Systems Engineering and Electronics, 2021, 43(6): 1664-1672.
|

Figures(3) / Tables(5)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: