

Multi-UUV Collaborative Bearing-only Target Tracking Based on Boundary Constrained Particle Filter
-
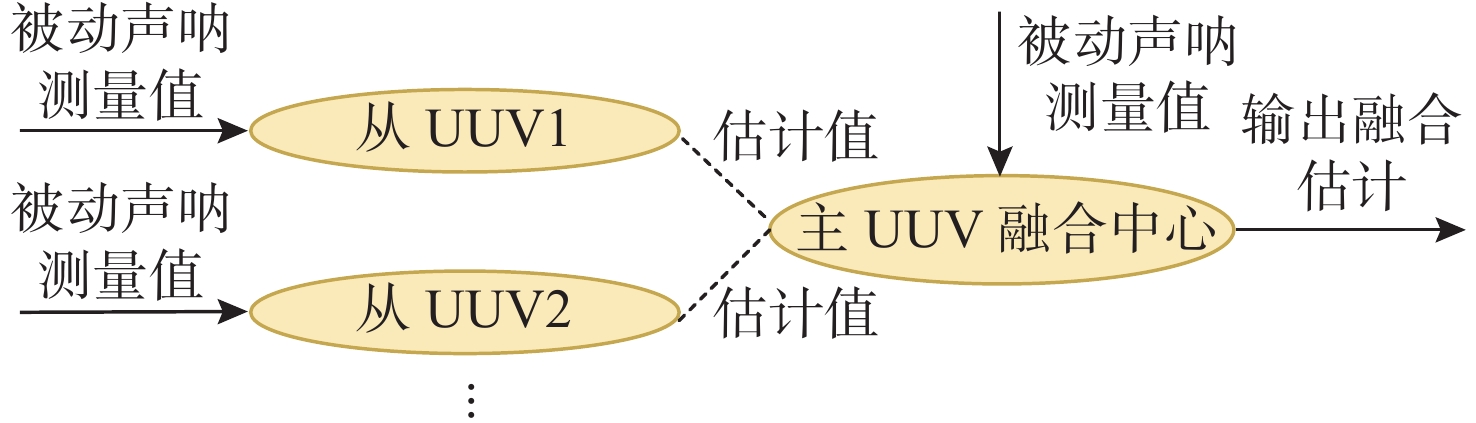
摘要: 面向海上跨域协同中多无人水下航行器(UUV)协同探测水面目标需求, 针对现有纯方位目标跟踪算法所面临的滤波器初始化困难和水声数据传输丢包问题, 提出了一种基于边界约束粒子滤波的多UUV协同纯方位目标跟踪算法。首先提出了主从式协同探测模型, 利用跟随者向领航者上报状态估计结果进行数据融合。其次, 基于UUV传感器和目标的先验信息设计了初始阶段可靠粒子生成方法和更新阶段的指标函数粒子权重优化方法。最后提出了基于灰色预测的分布式融合算法, 得到目标预测结果。仿真实验将所提算法和其他常见算法进行对比, 在通信丢包以及噪声干扰情况下验证了算法的有效性和可行性。Abstract: Aiming at the demand for multi unmanned undersea vehicles(UUV) collaborative detection of water surface targets in cross domain collaboration at sea, a multi UUV collaborative bearing only target tracking algorithm based on boundary constrained particle filtering is proposed to address the difficulties of filter initialization and packet loss in underwater acoustic data transmission faced by existing bearing only target tracking algorithms. Firstly, a master-slave collaborative detection model was proposed, which utilizes the follower to report the state estimation results to the navigator for data fusion. Secondly, based on the prior information of UUV sensors and targets, a reliable particle generation method for the initial stage and a particle weight optimization method for the indicator function in the update stage were designed. Finally, a distributed fusion algorithm based on gray prediction was proposed to obtain the target prediction results. The simulation experiment compared this algorithm with other common algorithms and verified the effectiveness and feasibility of the algorithm under communication packet loss and noise interference.
-

图 9 多UUV协同估计目标速度分量
Figure 9. Target velocity components for multi-UUVs collaborative estimation

图 10 多UUV协同估计的x分量位置RMSE
Figure 10. RMSE of x-component position for multi-UUVs collaborative estimation

图 11 多UUV协同估计的y分量位置RMSE
Figure 11. RMSE of y-component position for multi-UUVs collaborative estimation

图 12 多UUV协同估计的x分量速度RMSE
Figure 12. RMSE of x-component speed for multi UUV collaborative estimation

图 13 多UUV协同估计的y分量速度RMSE
Figure 13. RMSE of y-component speed for multi UUV collaborative estimation

图 14 不同丢包率下x分量位置RMSE
Figure 14. RMSE of target position at different packet loss rates on x component

图 15 不同丢包率下y分量位置RMSE
Figure 15. RMSE of target position at different packet loss rates on y component

图 16 不同丢包率下x分量速度RMSE
Figure 16. RMSE of target speed at different packet loss rates on x component

图 17 不同丢包率下y分量速度RMSE
Figure 17. RMSE of target speed at different packet loss rates on y component

图 19 主从UUV滤波算法运行时间
Figure 19. Calculation time of the filtering algorithm for master-slave UUV

图 20 基于灰色预测的数据融合算法单次计算时间
Figure 20. Single calculation time based on grey prediction data fusion algorithm

图 21 不同观测噪声强度下位置估计RMSE
Figure 21. Position estimation RMSE under different observation noise intensities
-
[1] 邱志明, 孟祥尧, 马焱, 等. 海上无人系统发展及关键技术研究[J]. 中国工程科学, 2023, 25(3): 74-83. [2] 刘兆才, 刘杰, 徐学伟. 基于扩展卡尔曼滤波的水下目标运动轨迹分析算法[J]. 舰船电子工程, 2019, 39(5): 24-25,40.Liu Zhaocai, Liu Jie, Xu Xuewei. Algorithm of undersea target movement based on extended Kalman filtering[J]. Ship Electronic Engineering, 2019, 39(5): 24-25,40. [3] 张俊根. 分布式伪线性卡尔曼滤波纯方位跟踪[J]. 控制工程, 2023, 30(4): 739-745.Zhang Jungen. Distributed Pseudolinear Kalman Filter for Bearing-only Tracking[J]. Control Engineering of China, 2023, 30(4): 739-745. [4] 朱斌, 刘正彬, 张媛, 等. 修正极坐标系下异类被动传感器多目标关联算法[J]. 信息记录材料, 2019, 20(9): 115-117. [5] Zhang H, Li X, Meng Y. Performance study of two bearings-only target tracking algorithms[J]. Journal of Physics: Conference Series. 2023, 2419: 012086. [6] 曲毅, 刘忠. 基于 UKF 的水下目标纯方位跟踪算法[J]. 舰船科学技术, 2009, 31(7): 133-136.Qu Yi, Liu Zhong. Research of underwater bearings-only target tracking algorithm based on UKF[J]. Ship Science and Technology, 2009, 31(7): 133-136. [7] 薛锋, 刘忠, 张晓锐. 高斯和粒子滤波器及其在被动跟踪中的应用[J]. 系统仿真学报, 2006(S2): 900-902. Xue Feng, Liu Zhong, Zhang Xiaorui. Gaussian sum particle filter for passive tracking[J]. Journal of System Simulation, 系统仿真学报, 2006(S2): 900-902. [8] 金巧园, 张国超, 代中华. 基于改进遗传粒子滤波的纯方位机动目标跟踪[J]. 应用科技, 2021, 48(5): 29-34.Jin Qiaoyuan, Zhang Guochao, Dai Zhonghua. Bearing-only maneuvering based on improved genetic particle filter algorithm[J]. Applied Science and Technology, 2021, 48(5): 29-34. [9] 田德艳, 张小川, 邹司宸, 等. L2正则化粒子滤波在水下无人平台纯方位角跟踪的应用[J]. 舰船科学技术, 2020, 42(23): 111-116.Tian Deyan, Zhang Xiaochuan, Zou Sichen, et al. Application of L2 regularized particle filter in pure azimuth tracking of underwater unmanned platform[J]. Ship Science and Technology, 2020, 42(23): 111-116. [10] 王燕, 李想, 齐滨, 等. 无源声呐场景中使用辅助粒子滤波的邻近目标检测前跟踪方法[J]. 声学学报, 2023, 48(2): 277-290.Wang Yan, Li Xiang, Qi Bin, et al. A track-before-detect method for neighboring targets based on auxiliary particle filter in passive sonar scenarios[J]. Acta Acustica, 2023, 48(2): 277-290. [11] 李敏, 陈志梅, 邵雪卷. 融合RTS平滑的迭代无迹卡尔曼粒子滤波方法[J]. 太原科技大学学报, 2016, 37(4): 266-269.Li Min, Chen Zhimei, Shao Xuejuan. Iterated unscented Kalman particle filter of fusion RTS smoothing[J]. Journal of Taiyuan University of Science and Technology, 2016, 37(4): 266-269. [12] 张程振, 丁元明, 杨阳. 水下目标跟踪粒子滤波算法性能分析[J]. 火力与指挥控制, 2022, 47(2): 18-24.Zhang Chengzhen, Ding Yuanming, Yang Yang. Research on tracking performance of particle filter for tracking underwater targets[J]. Fire Control & Command Control, 2022, 47(2): 18-24. [13] 杨健敏, 王佳惠, 乔钢, 等. 水声通信及网络技术综述[J]. 电子与信息学报, 2024, 46(1): 1-21.Yang Jianmin, Wang Jiahui, Qiao Gang, et al. Review of underwater acoustic communication and network technology[J]. Journal of Electronics & Information Technology, 2024, 46(1): 1-21. [14] Radtke S, Li K, Noack B, et al. Comparative study of track-to-track fusion methods for cooperative tracking with bearings-only measurements[C]//2019 IEEE International Conference on Industrial Cyber Physical Systems (ICPS). Taipei, China: IEEE, 2019: 236-241. [15] Hodson T O. Root mean square error(RMSE) or mean absolute error(MAE): When to use them or not[J]. Geoscientific Model Development, 2022, 15(14): 5481-5487. doi: 10.5194/gmd-15-5481-2022 -

 下载:
下载:





















 点击查看大图
点击查看大图
计量
- 文章访问数: 4
- HTML全文浏览量: 0
- PDF下载量: 1
- 被引次数: 0




