

Lightweight Modeling of Underwater Gliders and Nonlinear MPC Controller Design with Actuator Constraint
-
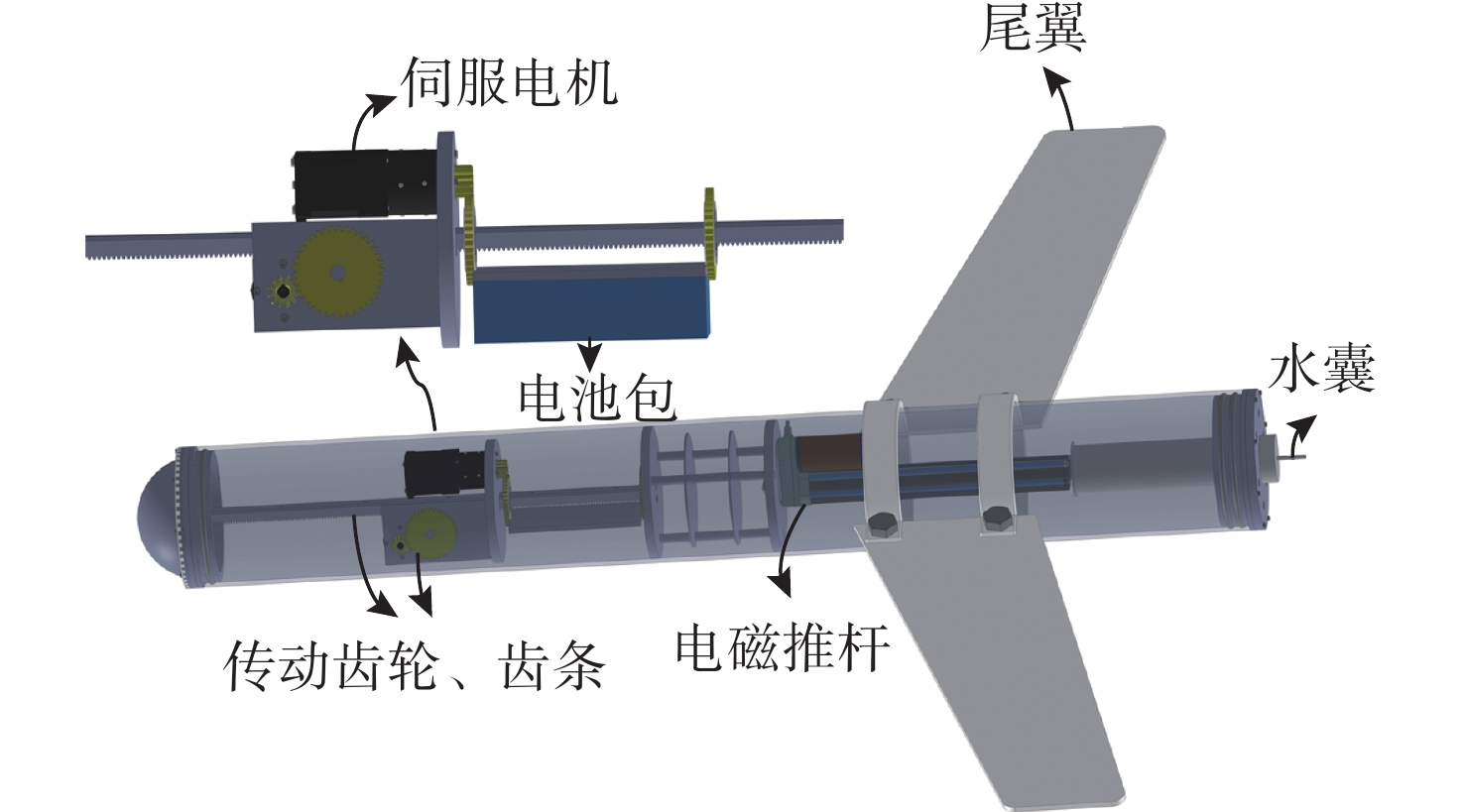
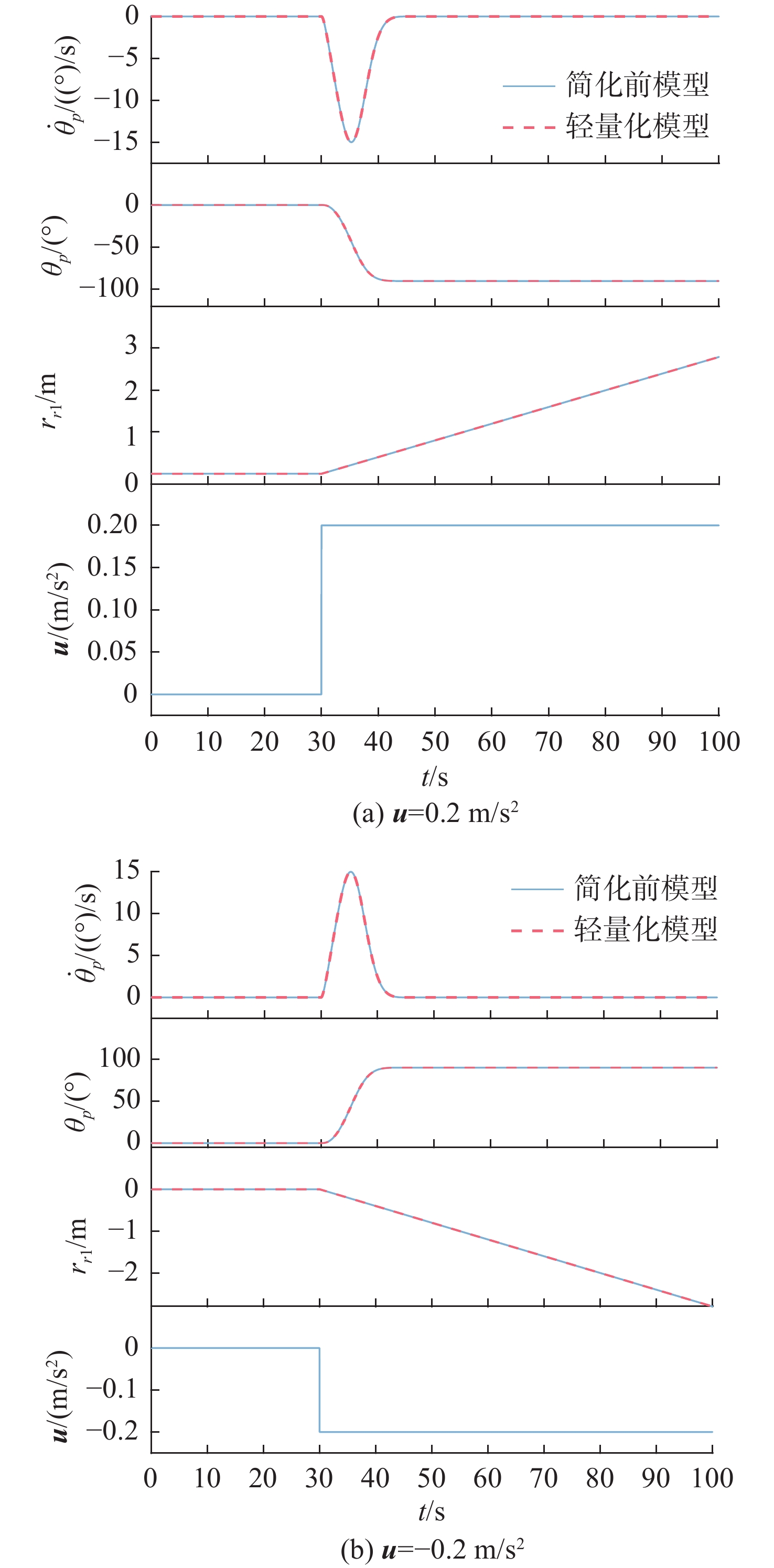
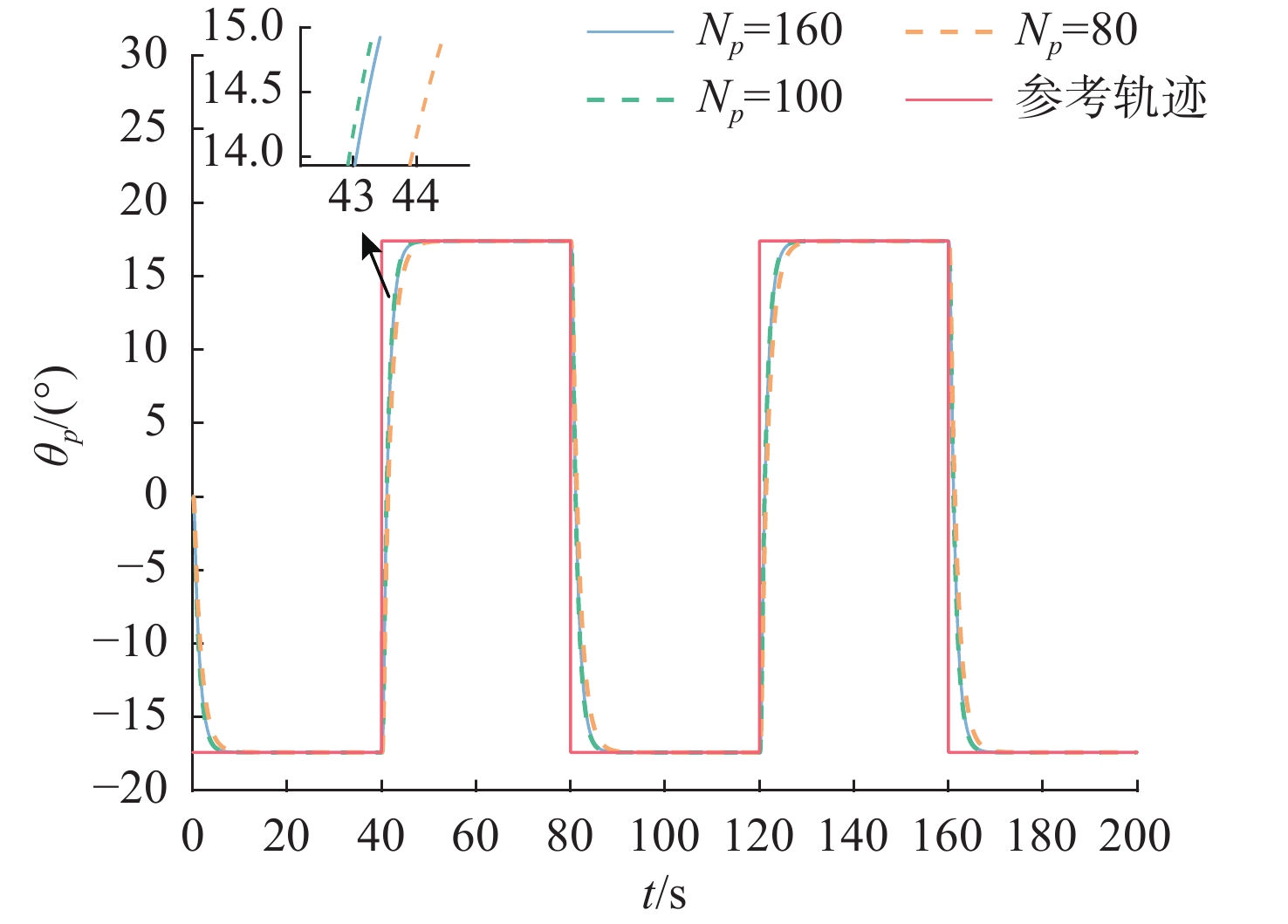
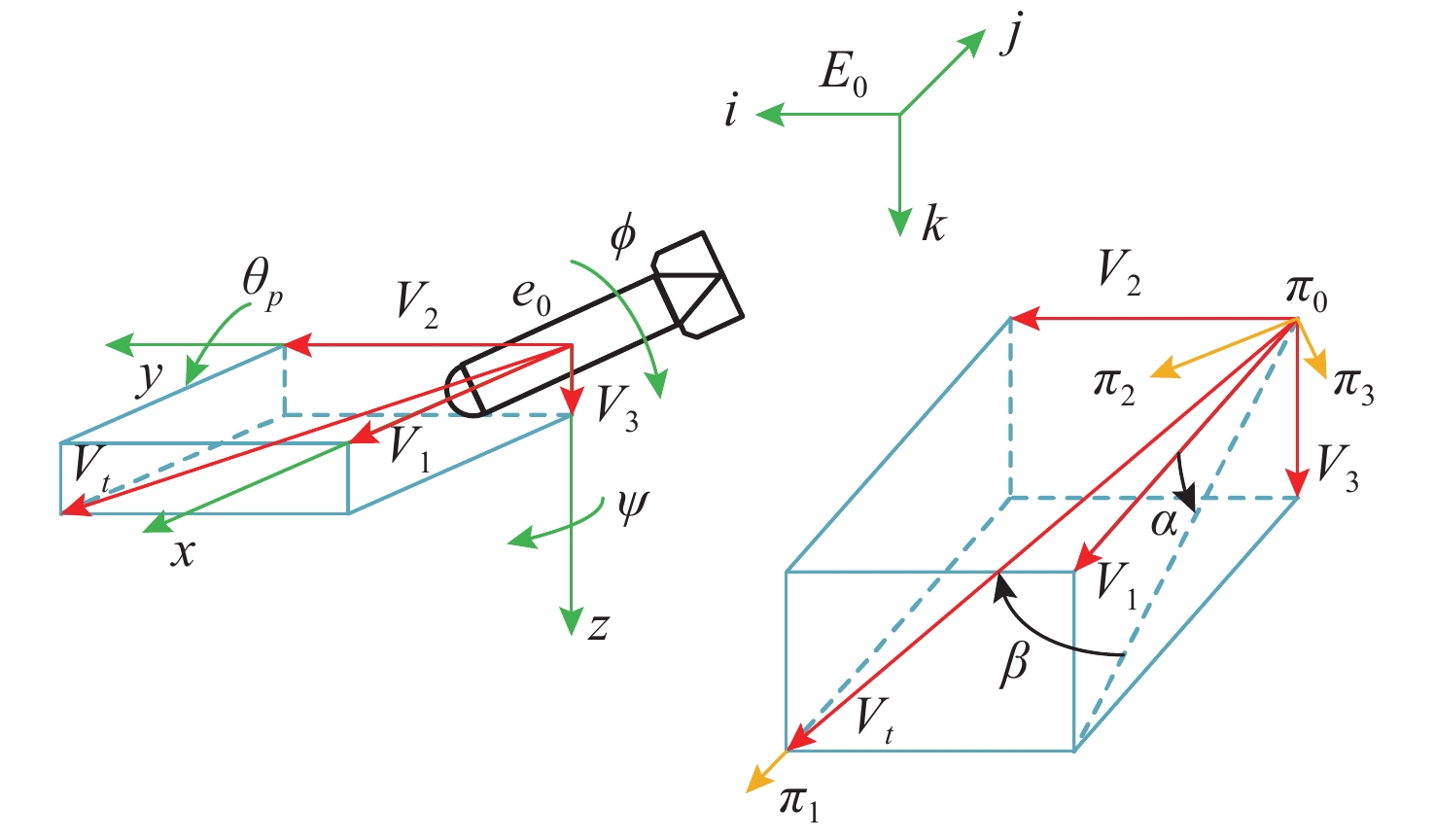
摘要: 针对现有水下滑翔机模型非线性程度和维度过高以及难以设计有效的工程化控制器的问题, 首先根据水下滑翔机的运动机构组成及工作原理, 忽略建模过程中的次要影响因素, 对水下滑翔机进行轻量化建模以降低模型非线性度及复杂度, 并通过对比验证证明了轻量化模型的有效性。随后, 针对纵垂面运动进一步精简动力学方程, 发挥该模型维度低、计算量小的优点, 引入状态和控制量的实际约束, 设计了贴合实际的实时线性化模型预测姿态控制算法。数值仿真结果证明, 在±17.4°和±22.5°等水下滑翔机常见工况下, 所提出的基于轻量化模型的控制算法可有效快速追踪期望姿态, 且上升时间和稳态调节时间均比传统控制器提高70%以上。Abstract: In response to the problems of high nonlinearity and dimensionality of existing underwater glider models, as well as difficulty in designing effective engineering controllers, the composition and working principle of the motion mechanism of underwater gliders were first studied. By neglecting secondary influencing factors in the modeling process, lightweight modeling of underwater gliders was conducted to reduce model nonlinearity and complexity. The effectiveness of the lightweight model was demonstrated through comparative verification. Subsequently, according to the motion in the vertical plane, the dynamic equation was further simplified, and the advantages of low dimension and small calculation amount of the model were brought into play. The actual constraints of state and control variables were introduced, and a realistic predictive attitude control algorithm for a real-time linearized model was designed. The numerical simulation results show that under the two common working conditions of ±17.4° and ±22.5° for underwater gliders, the control algorithm based on the lightweight model proposed in this paper can quickly track the desired attitude, and the rise time and steady-state settling time are improved by more than 70% compared with traditional controllers.
-
Key words:
- underwater glider /
- lightweight modeling /
- predictive control of model
-
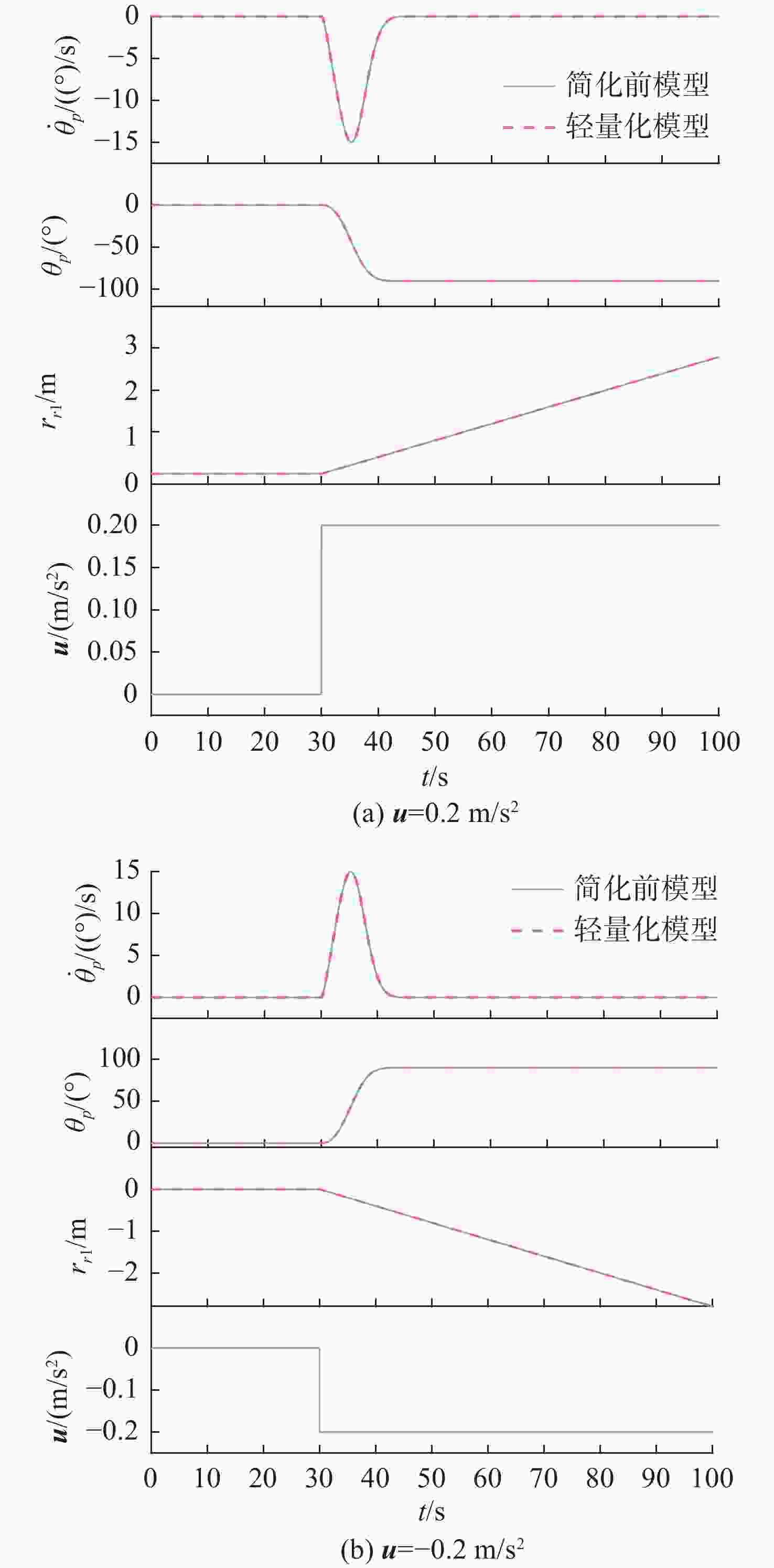
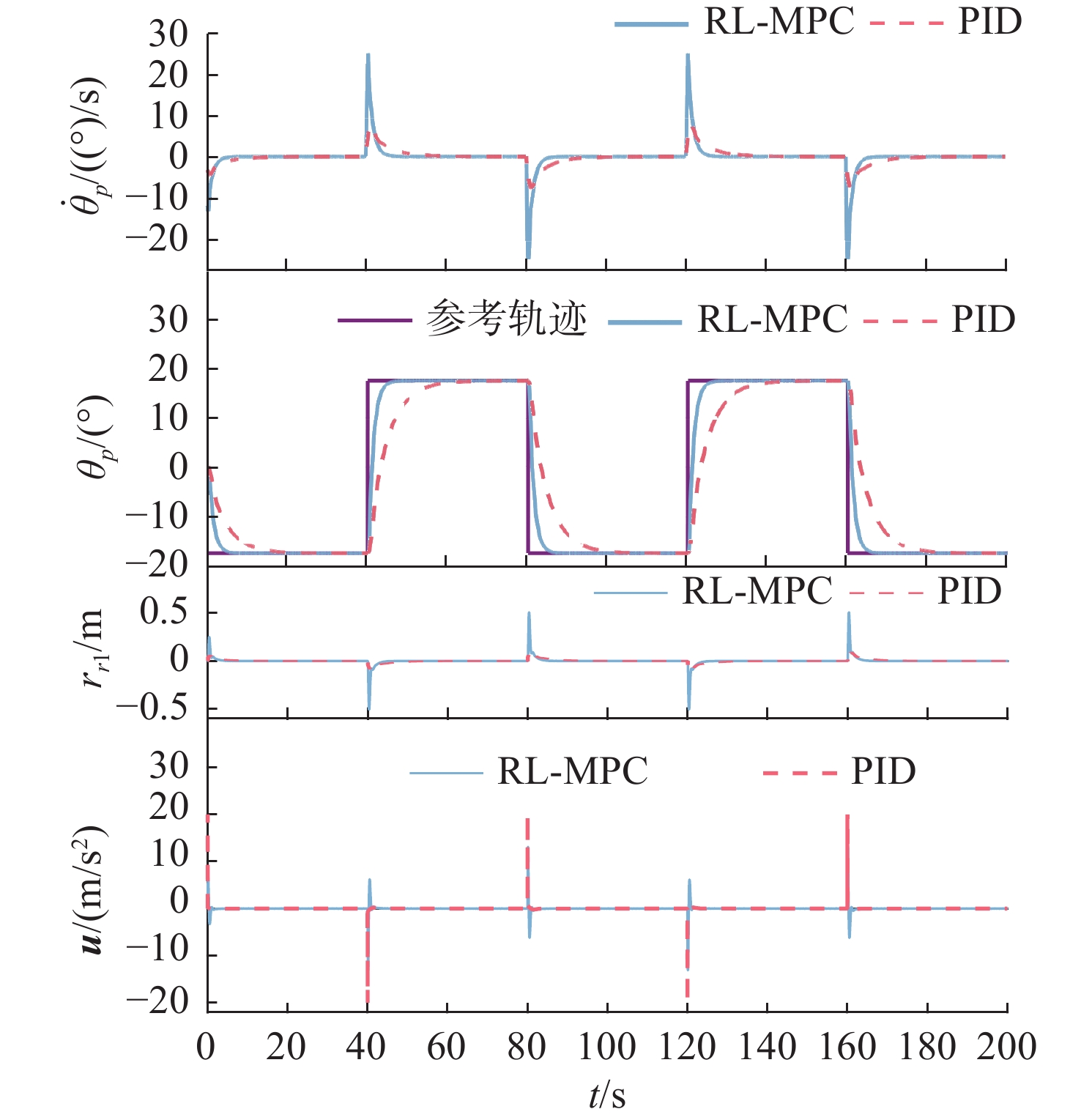
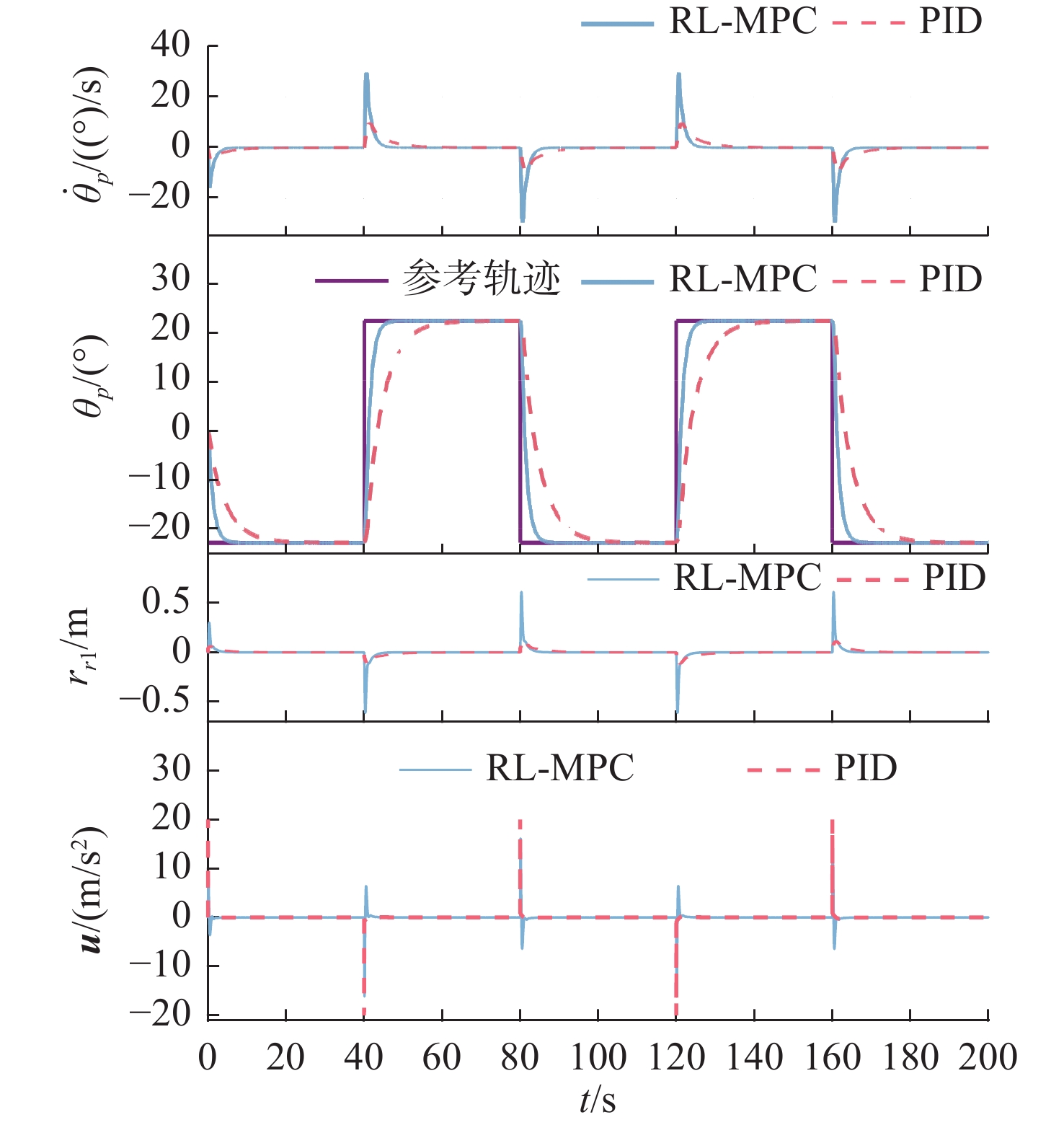
图 3 不同输入阶跃信号下俯仰角变化曲线
Figure 3. Change curves of pitch angle under different input step signals
表 1 实验参数列表
Table 1. List of experimental parameters
参数 数值 参数 数值 D/$ ( {{\text{m/}}{{\text{s}}^2}} ) $ 2.431 ${K_{M_0} }$/kg 0.28 $ {J_2} $/$( {{\text{kg}} \cdot {{\text{m}}^2}} )$ 25.430 $ {K_M} $/$( {{\text{kg/rad}}} )$ −65.84 $ {m_r} $/kg 11.000 $ {K_q} $/$( {{\text{kg}} \cdot {\text{s/ra}}{{\text{d}}^{\text{2}}}} )$ −205.64 g/$( {{\text{m/}}{{\text{s}}^{\text{2}}}} )$ 9.800 $ {m_s} $/kg 54.28 $ \tau $/s 0.200 $ {m_b} $/kg −0.5~0.5 $ {I_{s2}} $/$( {{\text{kg}} \cdot {{\text{m}}^{\text{2}}}} )$ 15.270 $ {I_{r2}} $/$( {{\text{kg}} \cdot {{\text{m}}^{\text{2}}}} )$ 10.16 $ {I_{A2}} $/$( {{\text{kg}} \cdot {{\text{m}}^{\text{2}}}} )$ 7.880 $\alpha $/(°) −7~7  下载: 导出CSV
下载: 导出CSV
表 2 RL-MPC与PID控制器性能指标对比
Table 2. Performance Index of RL-MPC and PID Controller
工作状态为$ \pm 17.4^\circ $ 时间/s 上升时间/s 调节时间/s PID RL-MPC PID RL-MPC 0~40 9.27 2.41 13.06 3.60 40~80 9.47 2.50 13.42 3.75 工作状态为$ \pm 22.5^\circ $ 时间/s 上升时间/s 调节时间/s PID RL-MPC PID RL-MPC 0~40 9.40 2.60 13.23 3.88 40~80 9.48 2.65 13.51 3.92
下载: 导出CSV
-
[1] 吴尚尚, 李阁阁, 兰世泉, 等. 水下滑翔机导航技术发展现状与展望[J]. 水下无人系统学报, 2019, 27(5): 529-540.Wu Shangshang, Li Gege, Lan Shiquan, et al. Present situation and prospect of navigation technologies for underwater glider[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 529-540. [2] 刁宏伟, 李宗吉, 王世哲, 等. 水下滑翔机研究现状及发展趋势[J]. 舰船科学技术, 2001, 44(6): 8-12.Diao Hongwei, Li Zongji, Wang Shizhe, et al. The research status and development trend of underwater glider[J]. Ship Science and Technology, 2001, 44(6): 8-12. [3] Leonard N E. Control synthesis and adaptation for an underactuated autonomous underwater vehicle[J]. IEEE Journal of Oceanic Engineering, 1995, 20(3): 211-220. doi: 10.1109/48.393076 [4] Leonard N E, Graver J G. Model-based feedback control of autonomous underwater gliders[J]. IEEE Journal of oceanic engineering, 2001, 26(4): 633-645. doi: 10.1109/48.972106 [5] Graver J G. Underwater gliders: Dynamics, control and design[D]. Princeton, USA: Princeton University, 2005. [6] 侯巍, 王树新, 张海根. 小型水下自航行器动力学建模与控制[J]. 天津大学学报: 自然科学与工程技术版, 2004, 37(9): 769-773.Hou Wei, Wang Shuxin, Zhang Haigen. Dynamic modeling and control for miniature autonomous underwater vehicle[J]. Journal of Tianjin University: Science and Technology, 2004, 37(9): 769-773. [7] Song Y, Ye H, Wang Y, et al. Energy consumption modeling for underwater gliders considering ocean currents and seawater density variation[J]. Journal of Marine Science and Engineering, 2021, 9(11): 1164. doi: 10.3390/jmse9111164 [8] 范双双. 洋流影响下的水下滑翔机动力学建模、运动分析与控制器设计研究[D]. 浙江: 浙江大学, 2013. [9] Mahmoudian N, Woolsey C. Analysis of feedforward/feedback control design for underwater gliders based on slowly varying systems theory[C]//AIAA Guidance, Navigation, and Control Conference. Chicago, U. S.: AIAA, 2009. [10] Tchilian R D S, Rafikova E, Gafurov S A. Optimal control of an underwater glider vehicle[J]. Procedia Engineering, 2017, 176: 732-740. doi: 10.1016/j.proeng.2017.02.322 [11] Wang Z, Yu C, Li M, et al. Vertical profile diving and floating motion control of the underwater glider based on fuzzy adaptive LADRC algorithm[J]. Journal of Marine Science and Engineering, 2021, 9(7): 698. doi: 10.3390/jmse9070698 [12] 孙秀军. 混合驱动水下滑翔器动力学建模及运动控制研究[D]. 天津: 天津大学, 2011. [13] 严升, 张润锋, 杨绍琼, 等. 水下滑翔机纵垂面变浮力过程建模与控制优化[J]. 中国机械工程, 2022, 33(1): 109-117.Yan Sheng, Zhang Runfeng, Yang Shaoqiong, et al. Modelling and control optimization for underwater gliders of variable buoyancy processes in vertical plane[J]. China Mechanical Engineering, 2022, 33(1): 109-117. [14] 李志超, 乔岳坤. 飞翼式水下滑翔机的性能分析与控制策略优化[J]. 哈尔滨工程大学学报, 2022, 43(1): 151-158.Li Zhichao, Qiao Yuekun. Performance analysis and motion control for a flying wing underwater glider[J]. Journal of Harbin Engineering University, 2022, 43(1): 151-158. [15] 陈弈煿, 张润锋, 杨绍琼, 等. 基于参数自整定 PID 的水下滑翔机航向控制方法[J]. 重庆大学学报, 2022, 45(8): 26-33.Chen Yibo, Zhang Runfeng, Yang Shaoqiong, et al. A steering control method of underwater glider based on parameter self-tuning PID[J]. Journal of Chongqing University, 2022, 45(8): 26-33. [16] Zhang S, Yu J, Zhang A, et al. Spiraling motion of underwater gliders: Modeling, analysis, and experimental results[J]. Ocean Engineering, 2013, 60: 1-13. doi: 10.1016/j.oceaneng.2012.12.023 [17] 朱芮, 吴迪, 陈继峰, 等. 电机系统模型预测控制研究综述[J]. 电机与控制应用, 2019, 46(8): 1-10.Zhu Rui, Wu Di, Chen Jifeng, et al. A review of research on motor system model predictive control[J]. Electric Machines & Control Application, 2019, 46(8): 1-10. [18] 周丽芹, 傅金辉, 宋大雷, 等. 基于高阶干扰观测器的水下滑翔机迭代学习控制[J]. 现代电子技术, 2022, 45(23): 97-104.Zhou Liqin, Fu Jinhui, Song Dalei, et al. High-order disturbance observer based iterative learning control of underwater glider[J]. Modern Electronics Technique, 2022, 45(23): 97-104. [19] Todd R E, Rudnick D L, Sherman J T, et al. Absolute velocity estimates from autonomous underwater gliders equipped with Doppler current profilers[J]. Journal of Atmospheric and Oceanic Technology, 2017, 34(2): 309-333. doi: 10.1175/JTECH-D-16-0156.1 [20] Mendiondo K C. Acoustic Doppler current observations of ocean current velocities from a seaexplorer glider[D]. Texas, USA: The University of Texas at San Antonio, 2020. -

 点击查看大图
点击查看大图
图(6) / 表(2)
计量
- 文章访问数: 921
- HTML全文浏览量: 41
- PDF下载量: 50
- 被引次数: 0




