

Finite-Time Sliding Mode Control for Undersea Vehicles
-
摘要: 针对水下航行器系统不确定性和非线性, 为解决不完全包裹水下航行器的纵向控制问题, 提出一种基于径向基函数神经网络的有限时间滑模控制系统。其中, 水下航行器状态空间方程中的未知项由神经网络的估计值补偿, 神经网络的权重由相应的自适应律更新。通过李雅普诺夫稳定性理论证明了该系统的稳定性, 其中跟踪误差可以在有限时间内收敛到接近零的小邻域。仿真结果表明, 文中的控制系统可使水下航行器在有限时间内较好地跟踪期望轨迹。Abstract: A finite-time sliding mode control system based on a radial basis function (RBF) neural network was proposed to solve the longitudinal control problem of incomplete submerged vehicles because of the uncertainty and nonlinearity of undersea vehicle systems. The unknown term in the state space equation of undersea vehicles was compensated for by the estimated value of the neural network, and the weight of the neural network was updated by the corresponding adaptive law. The stability of the system was proved by Lyapunov stability theory, where the tracking error could converge to a small neighborhood near zero within a finite time. The simulation results show that the control system proposed in this paper can make the undersea vehicle track the desired trajectory within a finite time.
-
Key words:
- undersea vehicle /
- finite-time control /
- sliding mode control /
- radial basis function
-

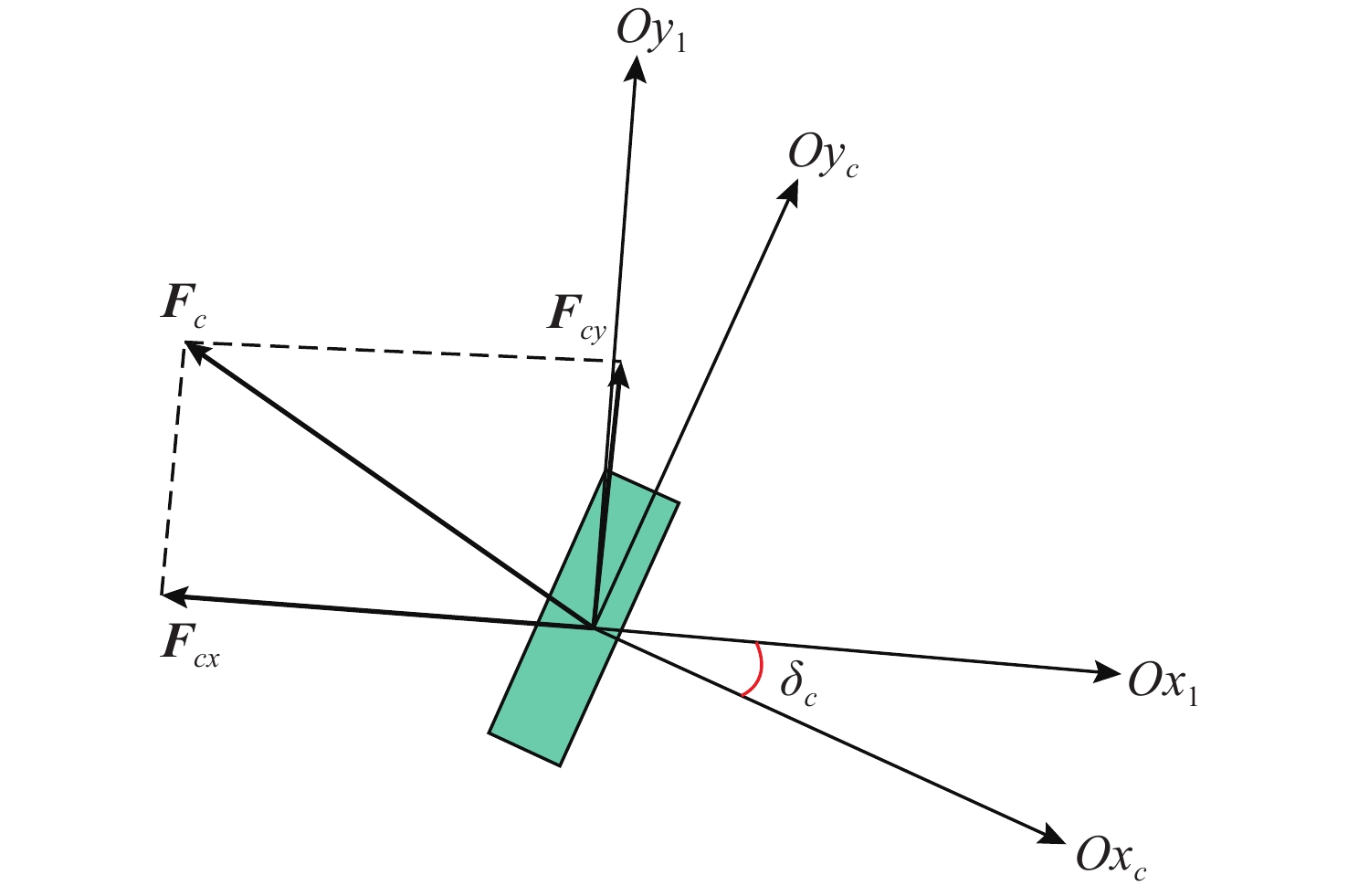
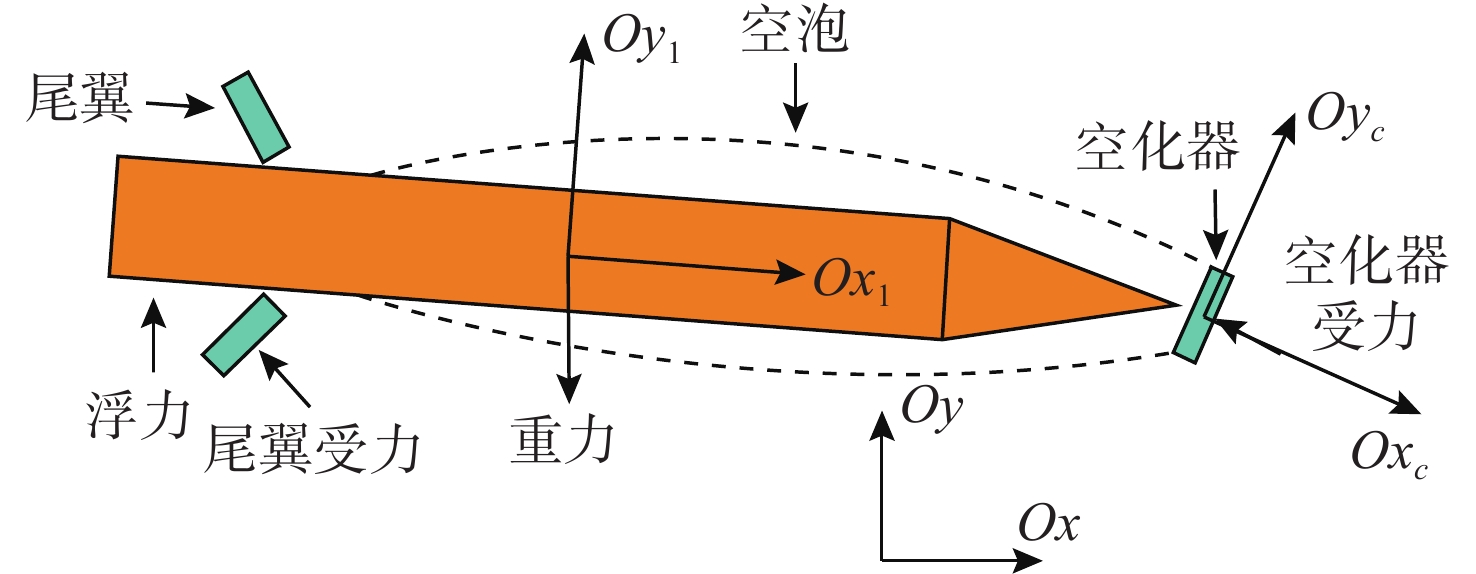
图 1 超空泡航行器受力及坐标系示意图
Figure 1. Forces acting on a supercavitating vehicle and coordinate system

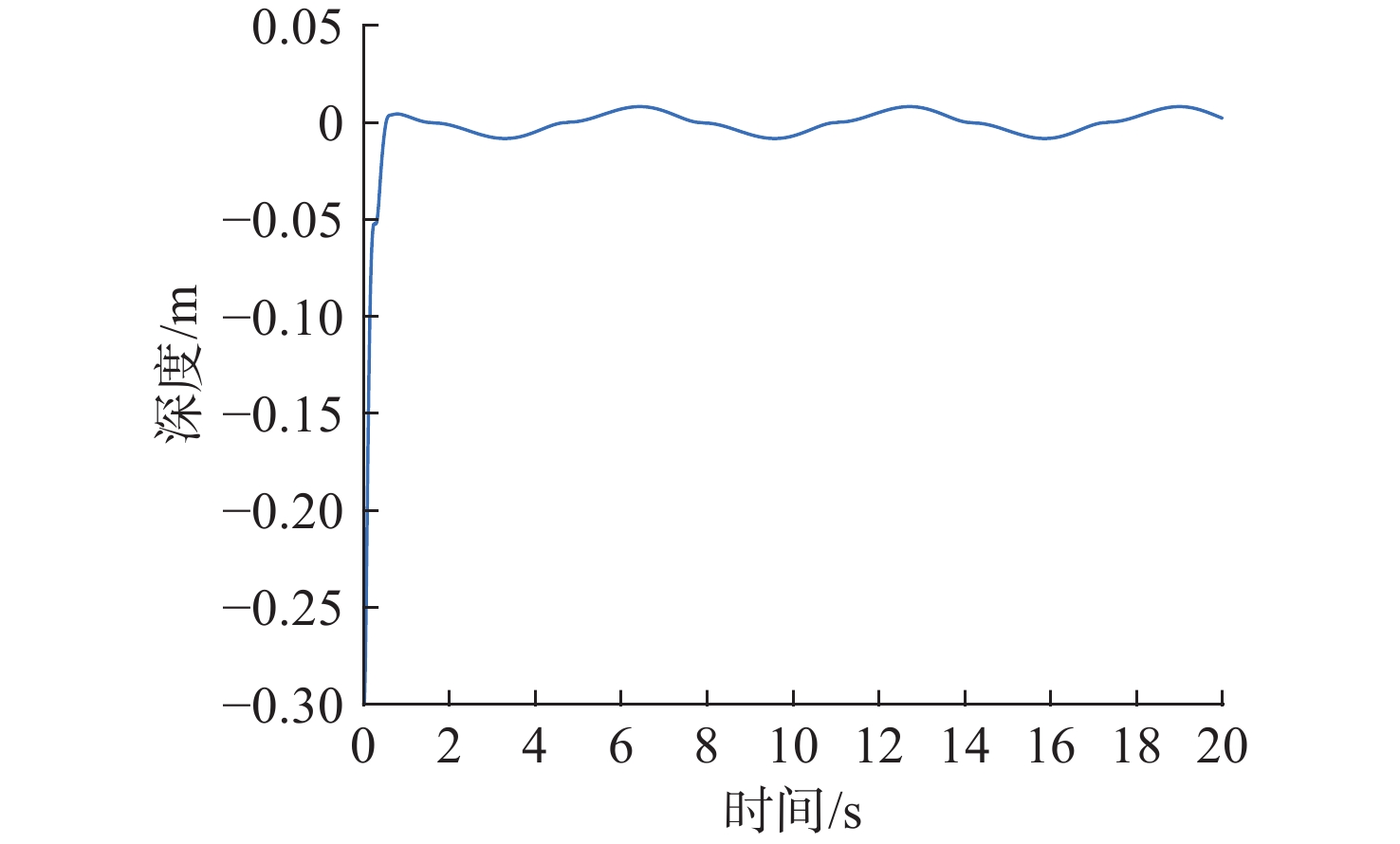
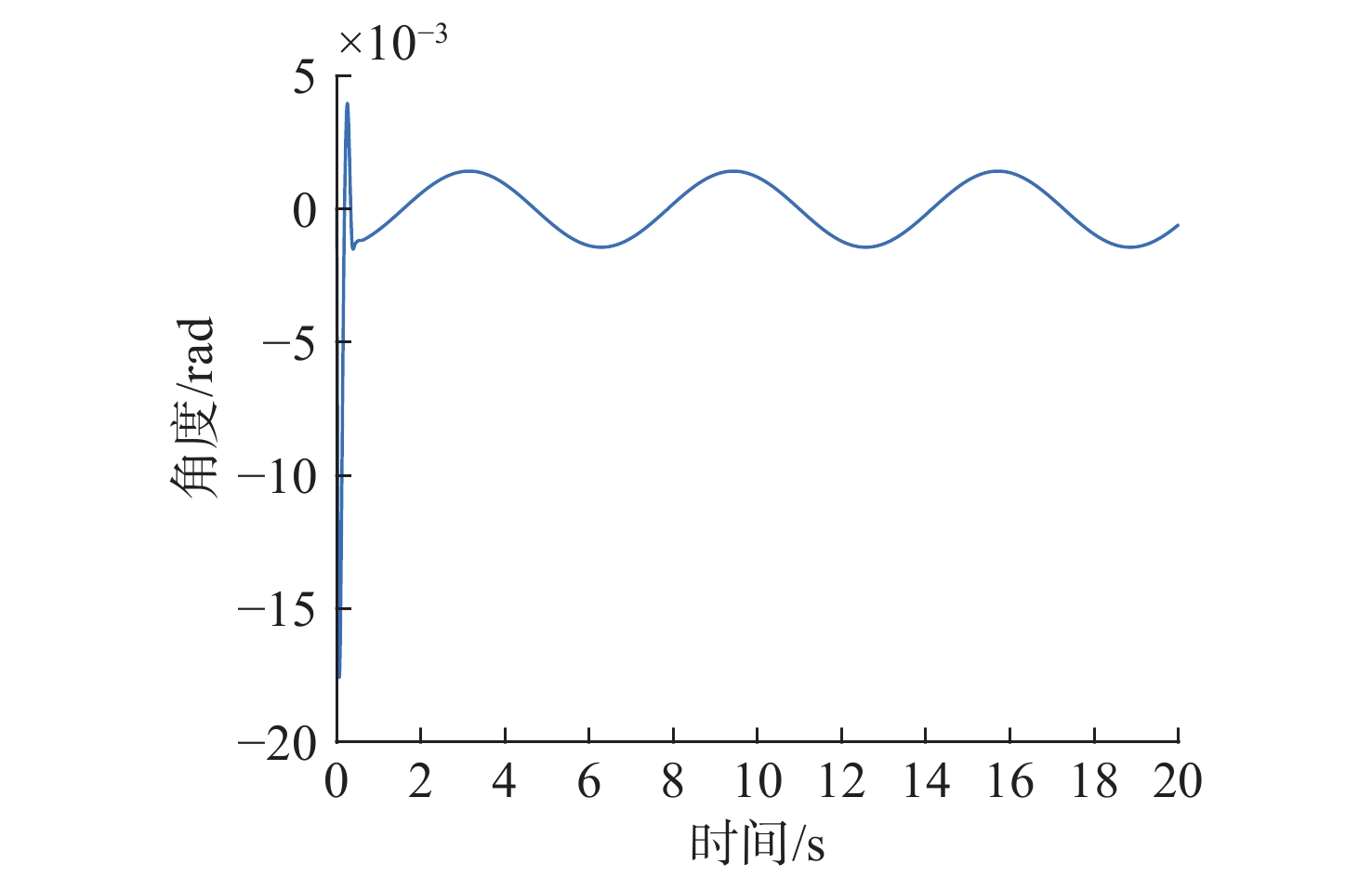
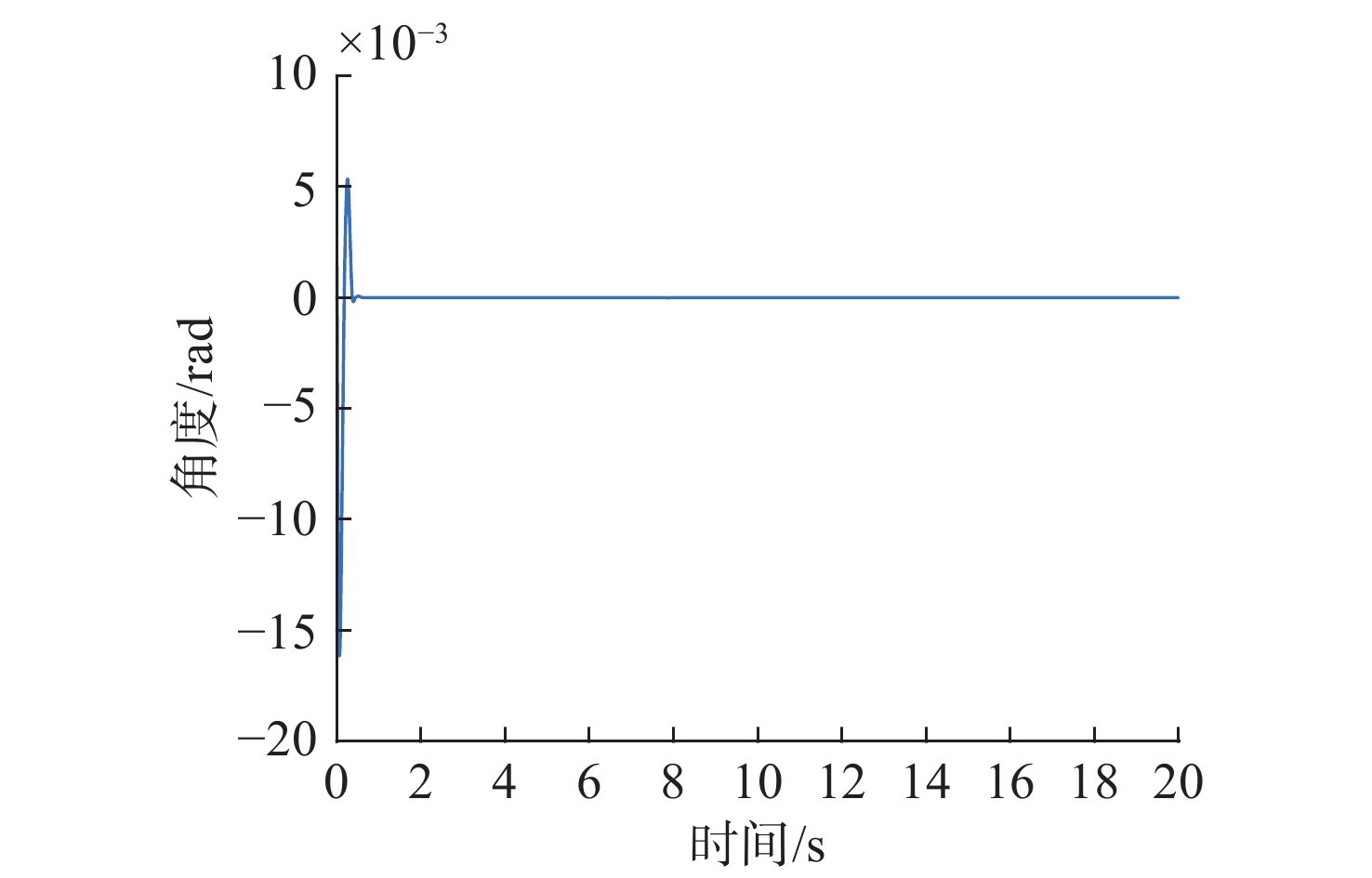
图 13 未知项估计误差随时间变化曲线
Figure 13. Curve of the estimation error of unknown term with time
表 1 水下航行器动力学参数
Table 1. Dynamic parameters of undersea vehicle
参数 值 质量/kg 30.200 航行器总长/m 1.446 空化器直径/m 0.026 转动惯量/(kg·m2) 3.234 航行器直径/m 0.118 巡航速度/(m/s) 70.000  下载: 导出CSV
下载: 导出CSV
-
[1] 张宇文, 袁绪龙, 邓飞. 超空泡航行体流体动力学[M]. 北京: 国防工业出版社, 2014. [2] Semenenko V N, Naumova Y I. Study of the supercavitating body dynamics[J]. Springer Berlin Heidelberg, 2012(9): 147-176. [3] Lin G, Balachandran B, Abed E H. Nonlinear dynamics and bifurcations of a supercavitating vehicle[J]. IEEE Journal of Oceanic Engineering, 2007, 32(4): 753-761. doi: 10.1109/JOE.2007.908960 [4] Kirschner I N, Kring D C, Stokes A W. Control strategies for underwater vehicles[J]. Journal of Vibration and Control, 2002, 8(2): 219-242. [5] Li D J, Luo K, Zhang Y W, et al. Studies on fixed-depth control of supercavitating vehicles[J]. Acta Automatica Sinica, 2010, 36(3): 421-426. [6] Liu S, Wang D, Poh E K, et al. Nonlinear output feedback controller design for tracking control of ODIN in wave disturbance condition[C]//IEEE Oceans 2005 MTS/IEEE. Washington, DC, USA: IEEE, 2005. [7] Fan H, Zhang Y, Wang X. Longitudinal dynamics modeling and MPC strategy for high-speed supercavitating vehicles[C]//IEEE 2011 International Conference on Electric Information and Control Engineering(ICEICE). Wuhan, China: IEEE, 2011: 5947-5950. [8] Li Y, Liu M, Zhang X, et al. Global approximation based adaptive RBF neural network control for underwater vehicles[J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 797-804. doi: 10.21629/JSEE.2018.04.14 [9] Man Z, Yu X H, Eshraghian K, et al. A robust adaptive sliding mode tracking control using an RBF neural network for robotic manipulators[C]//IEEE International Conference on Neural Networks. Perth, WA, Australia: IEEE, 1995. [10] 张学伟, 张亮, 王聪, 等. 基于Logvinovich独立膨胀原理的超空泡形态计算方法[J]. 兵工学报, 2009, 30(3): 361-365. doi: 10.3321/j.issn:1000-1093.2009.03.021Zhang Xuewei, Zhang Liang, Wang Cong, et al. A calculation method for supercavity shape based on the Logvinovich independence principle of the cavity section expansion[J]. Acta Armamentarii, 2009, 30(3): 361-365. doi: 10.3321/j.issn:1000-1093.2009.03.021 [11] Shen Y J, Huang Y H. Uniformly observable and globally lipschitzian nonlinear systems admit global finite-time observers[J]. IEEE Transactions on Automatic Control, 2009, 54(11): 2621-2625. doi: 10.1109/TAC.2009.2029298 [12] Shen Y J, Xia X H. Semi-global finite-time observers for nonlinear systems[J]. Automatica, 2008, 44(12): 3152-3156. doi: 10.1016/j.automatica.2008.05.015 -



 点击查看大图
点击查看大图
图(13) / 表(1)
计量
- 文章访问数: 92
- HTML全文浏览量: 31
- PDF下载量: 33
- 被引次数: 0




