

Adaptive Flocking Control for Crowded UUV Swarm with Time-Delay Constraint
-
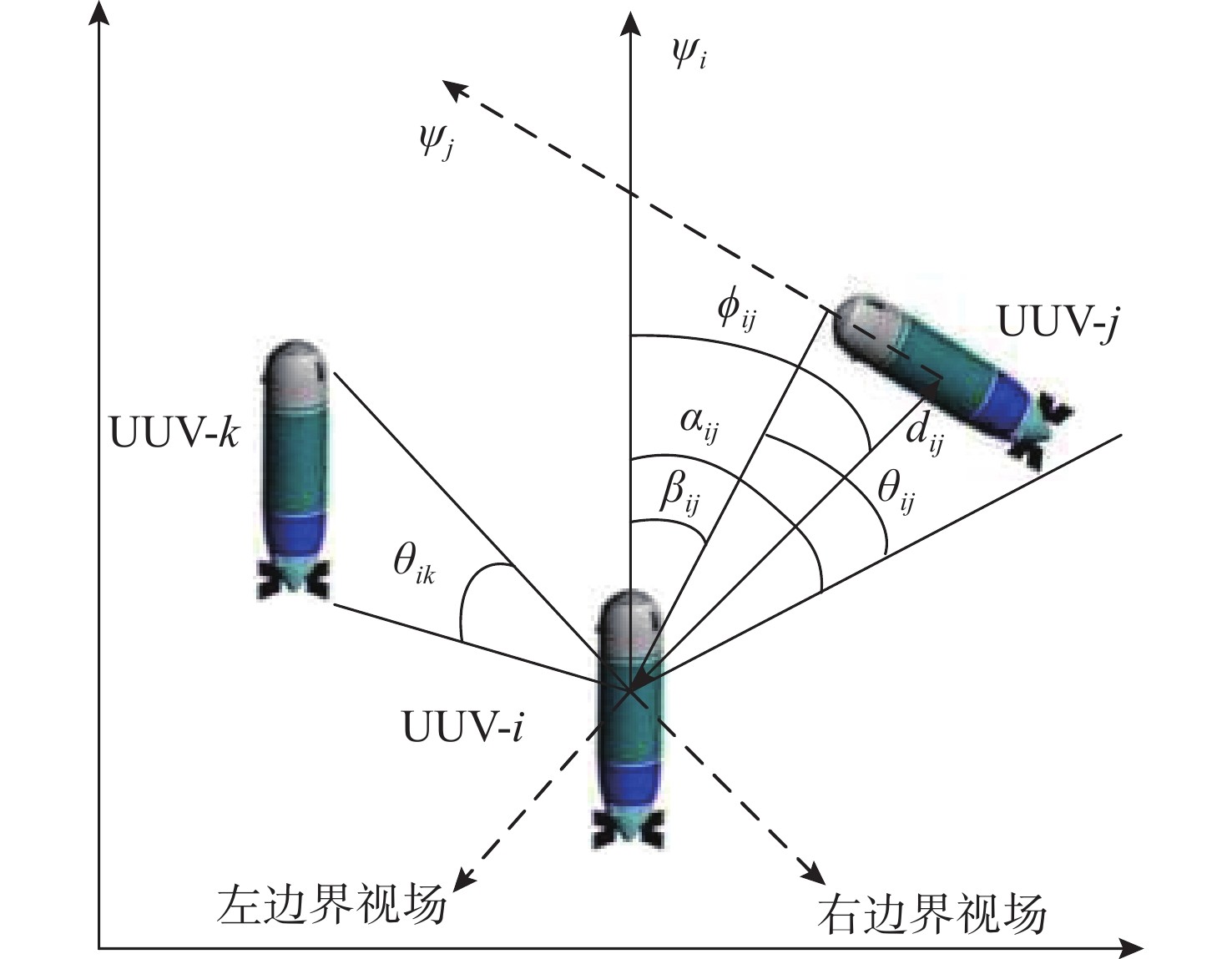
摘要: 针对时延条件下无人水下航行器(UUV)集群聚集控制问题, 受不同尺度生物仿生机理启发, 提出一种密集集群自适应聚集控制方法。首先, 设计考虑近邻数量和空间分布的仿生邻居筛选机制, 以此建立单近邻跟随与多近邻跟随耦合的自适应集群结队交互模型, 确保交互邻居在数量和空间上最优。其次, 结合结对交互模型与一致性协议、势场函数模型和扰动观测器, 设计时延约束的UUV密集集群自适应聚集控制方法, 避免集群发生碰撞和分裂。最后, 通过Lyapunov定理证明时延条件下UUV密集集群状态一致性以及避碰和连通性保持。仿真结果验证了所设计控制方法的有效性和优越性。Abstract: To address the flocking control problem of a crowded unmanned undersea vehicle (UUV) swarm under time-delay constraints, an adaptive flocking control approach was investigated using a multiscale bio-inspired mechanism. First, an adaptive flocking interaction model with a bio-inspired optimal neighbor selection strategy was established to robustly switch between single neighbor following and multiple neighbors following, which ensures the minimum quantity and optimal distribution. Second, considering time-delay constraints, a flocking controller was developed by incorporating a consensus protocol, potential field function model, and disturbance observer into the proposed interaction model, thereby guaranteeing collision avoidance and connectivity maintenance. Finally, by virtue of the Lyapunov theorem, state consensus under the time-delay condition is proved. Simulation results verify the effectiveness and superiority of the proposed control method.
-
表 1 平均航向与尺度参数
Table 1. Mean heading and scale parameter
时间/s 固定距离 固定数量 文中方法 $ {\vartheta _1}(t) $ $ {\vartheta _2}(t) $ $ {\vartheta _1}(t) $ $ {\vartheta _2}(t) $ $ {\vartheta _1}(t) $ $ {\vartheta _2}(t) $ t=0 48.5 0.85 50.5 0.88 40.2 0.82 t=10 42.5 0.73 48.5 0.80 35.5 0.56 t=20 39.7 0.67 44.7 0.75 39.8 0.33 t=30 40.2 0.58 43.2 0.62 36.8 0.32 t=40 39.4 0.52 42.4 0.53 36.8 0.32 t=50 38.8 0.51 38.8 0.45 36.8 0.32 t=60 36.9 0.51 37.1 0.45 36.8 0.32  下载: 导出CSV
下载: 导出CSV
-
[1] Fischell E M, Kroo A R, Neill B W. Single-hydrophone low-cost underwater vehicle swarming[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 354-361. doi: 10.1109/LRA.2019.2958774 [2] Liang H T, Fu Y F, Kang F J, et al. A behavior-driven coordination control framework for target hunting by UUV intelligent swarm[J]. IEEE Access, 2020, 8(1): 4838-59. [3] Liang H T, Cao H, Fu Y F. Decentralized adaptive flocking control algorithm with avoiding collision and preserving connectivity for crowded UUV swarm with uncertainties and input saturation[J]. Ocean Engineering, 2021, 237: 109545. doi: 10.1016/j.oceaneng.2021.109545 [4] Liang H T, Fu Y F, Gao J, et al. Finite-time velocity-observed based adaptive output-feedback trajectory tracking formation control for underactuated unmanned underwater vehicles with prescribed transient performance[J]. Ocean Engineering, 2021, 233: 109071. doi: 10.1016/j.oceaneng.2021.109071 [5] Peng Z H, Wang J, Wang D, et al. An overview of recent advances in coordinated control of multiple autonomous surface vehicles[J]. IEEE Transactions on Industrial Informatics, 2021, 17(2): 732-745. doi: 10.1109/TII.2020.3004343 [6] Oh H, Ramezan S, Ataollah S, et al. Bio-inspired self-organising multi-robot pattern formation: A review[J]. Robotics & Autonomous Systems, 2017, 91: 83-100. [7] Petersen K H, Napp N, Stuart-Smith R, et al. A review of collective robotic construction[J]. Science Robotics, 2019, 28(4): 8479. [8] Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile autonomous agents using nearest neighbour rules[J]. IEEE Transactions on Automatic Control, 2003, 48(6): 988-1001. doi: 10.1109/TAC.2003.812781 [9] Morteza M, Nader M, Farzaneh A. Robust consensus of autonomous underactuated surface vessels[J]. IET Control Theory & Applications, 2017, 11(4): 486-494. [10] Ling H J, Guillam E M, Kasper V V, et al. Local interactions and their group-level consequences in flocking jackdaws[J]. Proceedings of Royal Society B, 2019, 286: 20190865. doi: 10.1098/rspb.2019.0865 [11] Ariana S P, Colin, R T, Nikolai W F, et al. Visual sensory networks and effective information transfer in animal groups[J]. Current Biology, 2013, 23(17): 709-711. doi: 10.1016/j.cub.2013.07.059 [12] 张令, 段海滨, 雍婷, 等. 基于寒鸦配对交互行为的无人机集群编队控制[J]. 北京航空航天大学学报, 2021, 47(2): 391-397.Zhang Ling, Duan Haibin, Yong Ting, et al. Unmanned aerial vehicle swarm formation control based on paired interaction mechanism in jackdaws[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 391-397. [13] 雷小康, 刘明雍, 杨盼盼. 基于邻域跟随的群集系统分群控制算法[J]. 控制与决策, 2013, 28(5): 741-745.Lei Xiaokang, Liu Mingyong, Yang Panpan. Fission control algorithm for swarm based on local following interaction[J]. Control and Decision, 2013, 28(5): 741-745. [14] Liang H T, Fu Y F, Gao J. Bio-inspired self-organized cooperative control consensus for crowded UUV swarm based on adaptive dynamic interaction topology[J]. Applied Intelligence, 2021, 51: 4664-4681. doi: 10.1007/s10489-020-02104-5 [15] Kubota T. Investigation of obstacle avoidance algorithm in paired-driving autonomous mobile robots revealed by mimicking ultrasonic sensing in bats[J]. The Journal of the Acoustical Society of America, 2019, 146: 2959. [16] 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41(2): 289-297. doi: 10.11990/jheu.201909039Zhang Wei, Wang Naixin, Wei Shilin, et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41(2): 289-297. doi: 10.11990/jheu.201909039 [17] 杨盼盼, 张瑾琪, 刘家毓. 水声通信时延下集群式AUV分群控制算法[J]. 兵器装备工程学报, 2018, 39(12): 113-117. doi: 10.11809/bqzbgcxb2018.12.023Yang Panpan, Zhang Jinqi, Liu Jiayu. Fission control algorithm for swarm underwater vehicles with acoustic communication delay[J]. Journal of Ordnance Equipment Engineering, 2018, 39(12): 113-117. doi: 10.11809/bqzbgcxb2018.12.023 [18] Yan Z P, Liu Y B, Zhou J J, et al. Consensus of multiple autonomous underwater vehicles with double independent markovian switching topologies and time varying delays[J]. Chinese Physics B, 2017, 26(4): 040203. doi: 10.1088/1674-1056/26/4/040203 [19] Yan Z P, Yang Z W, Yue L D, et al. Discrete-time coordinated control of leader-following multiple AUVs under switching topologies and communication delays[J]. Ocean Engineering, 2019, 172: 361-372. doi: 10.1016/j.oceaneng.2018.12.018 [20] 李沛, 段海滨. 一种基于注意力机制的群集运动模型[J]. 中国科学: 科学技术, 2019, 49(9): 1040-50. doi: 10.1360/N092018-00135Li Pei, Duan Haibin. A flocking model base on selective attention mechanism[J]. Scientia Sinica: Technologica, 2019, 49(9): 1040-50. doi: 10.1360/N092018-00135 [21] 刘磊, 孙卓文, 陈令仪, 等. 基于深度学习的仿生集群运动智能控制[J]. 控制与决策, 2021, 36(9): 2195-02.Liu Lei, Sun Zhuowen, Chen Lingyi, et al. Intelligent control of bionic collective motion based on deep learning[J]. Control and Decision, 2021, 36(9): 2195-02. [22] Sahu B, Subudhi B. Flocking control of multiple AUVs based on fuzzy potential functions[J]. IEEE Transactions on Fuzzy System, 2018, 26(5): 2539-51. doi: 10.1109/TFUZZ.2017.2786261 -


 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 86
- HTML全文浏览量: 15
- PDF下载量: 32
- 被引次数: 0




