

Cooperative Hunting Method for Multiple-Agents Using Differential Games Based on Escape Angle
-
摘要: 针对单个对抗性目标主动逃逸问题, 利用微分博弈理论建立了多智能体协同围捕问题博弈模型, 在含有距离项支付函数中引入由逃逸角构成的合围项, 从而降低目标中途逃逸的概率; 然后将围捕问题转换为求解可实现策略的优化问题, 利用粒子群优化算法求解满足纳什均衡的最优策略, 仿真和湖上试验结果均证明了基于粒子群的微分博弈围捕算法的有效性。Abstract: Aiming at the problem that the adversarial single-target actively escapes, a game model of multi-agent cooperative encirclement problem is established using differential game (DG) theory. Introducing The escape angle correlation term is introduced into the traditional payment function which includes the distance cost such that the escape probability of the target is reduced; At the same time, the encirclement problem is converted into multiple groups of pursuit and escape countermeasures, and Particle Swarm Optimization (PSO) algorithm is used to solve the optimal strategy that satisfies the Nash equilibrium. The simulation results show the effectiveness of the algorithm based on DG-PSO fusion. Then experiments based on multiple autonomous surface vehicles shows that the designed hunting algorithm is effective.
-
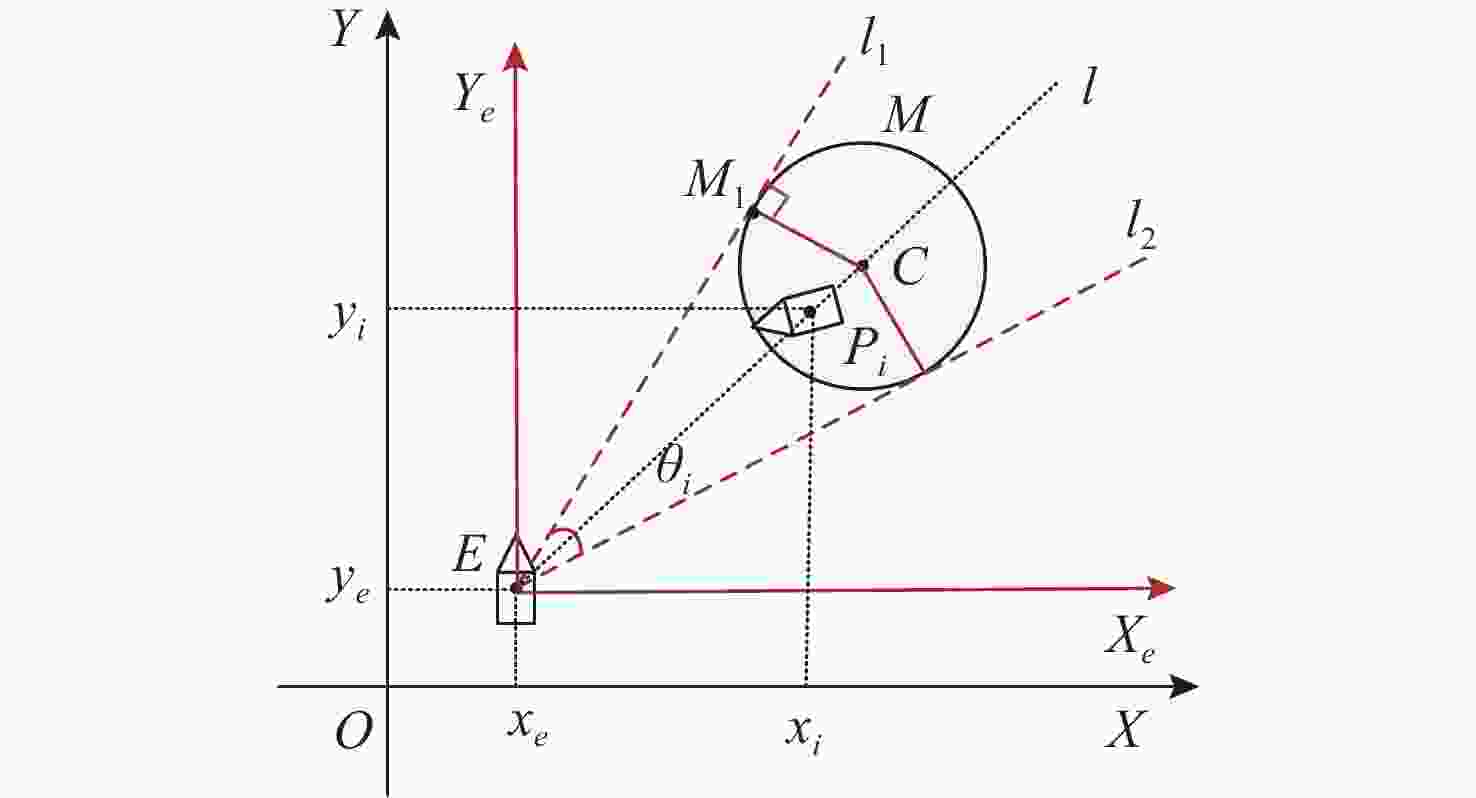
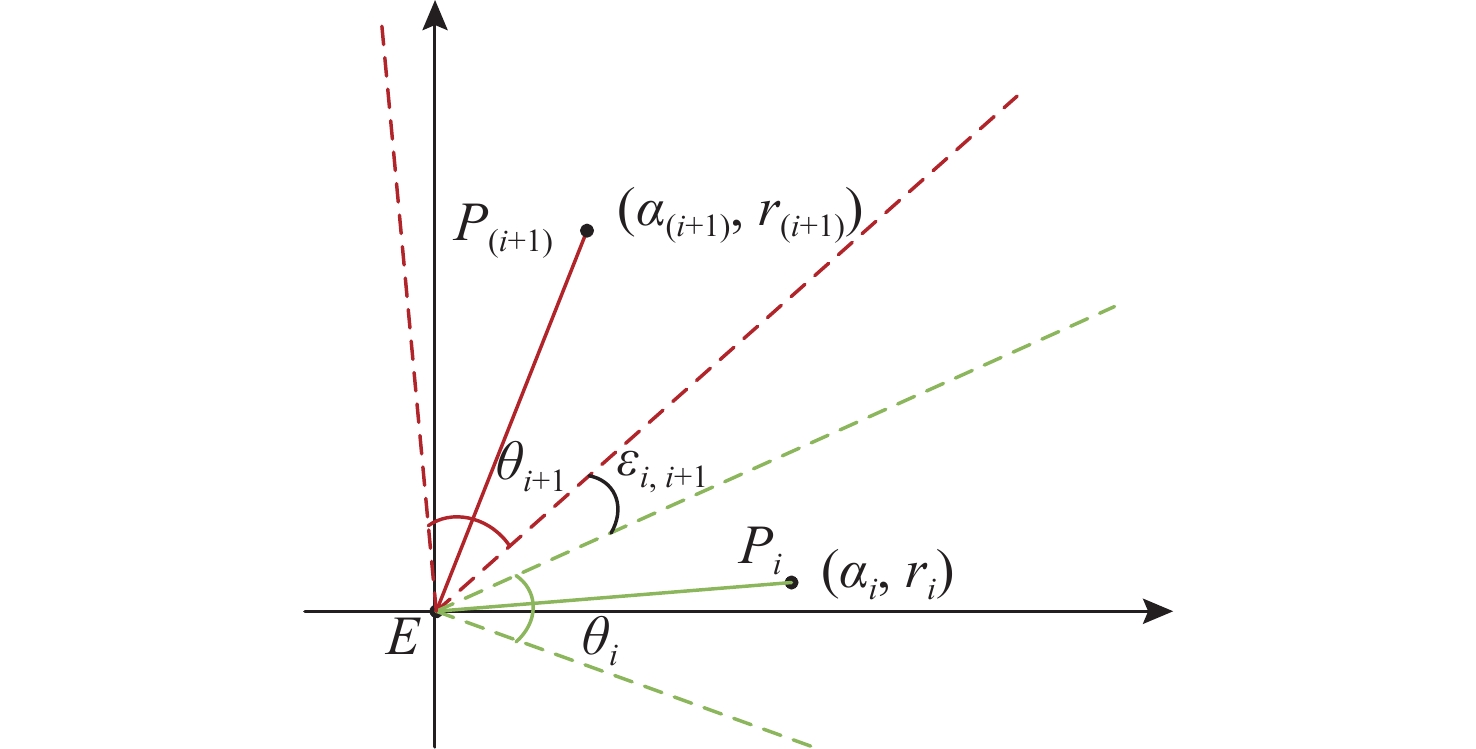
图 1 二维直角坐标系追逃几何模型
Figure 1. Two-dimensional Cartesian coordinate system pursuit-and-escape geometry
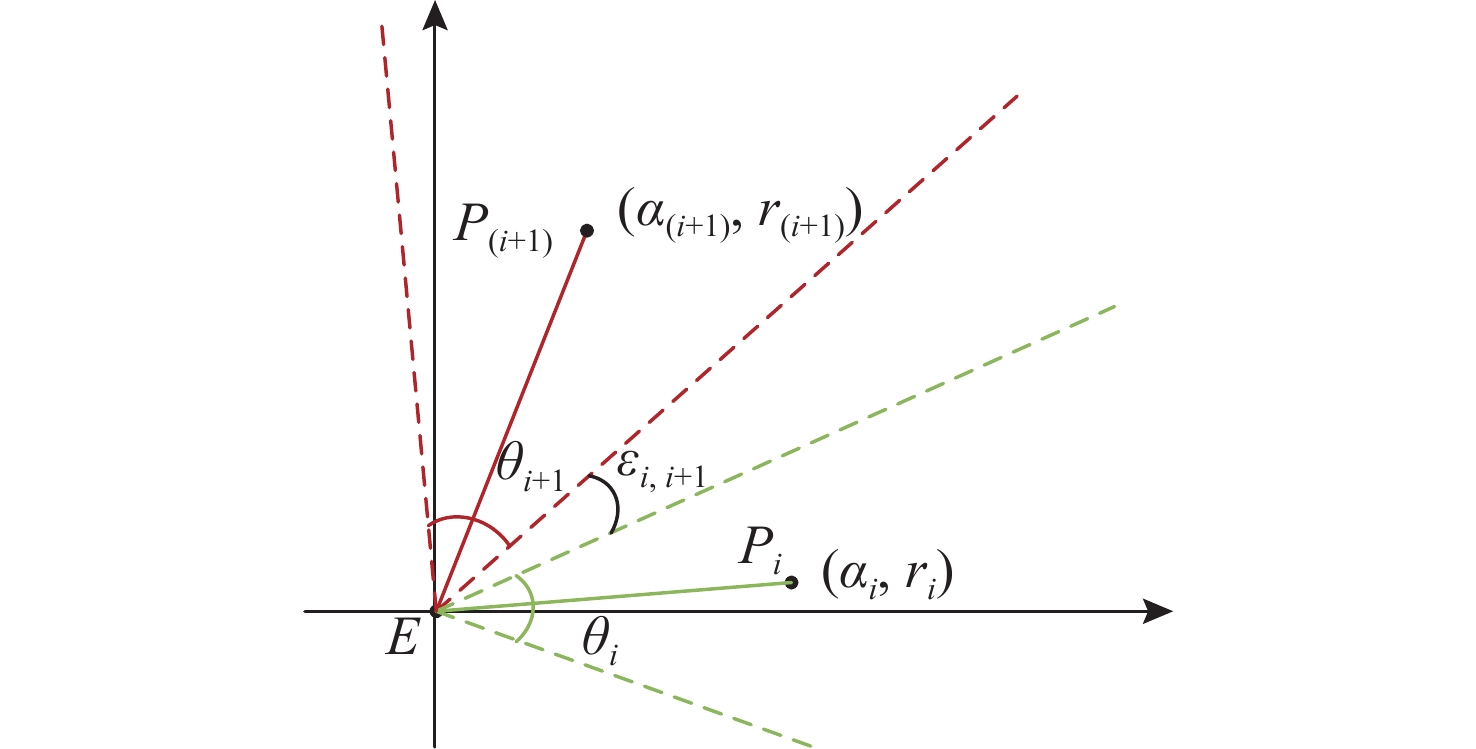
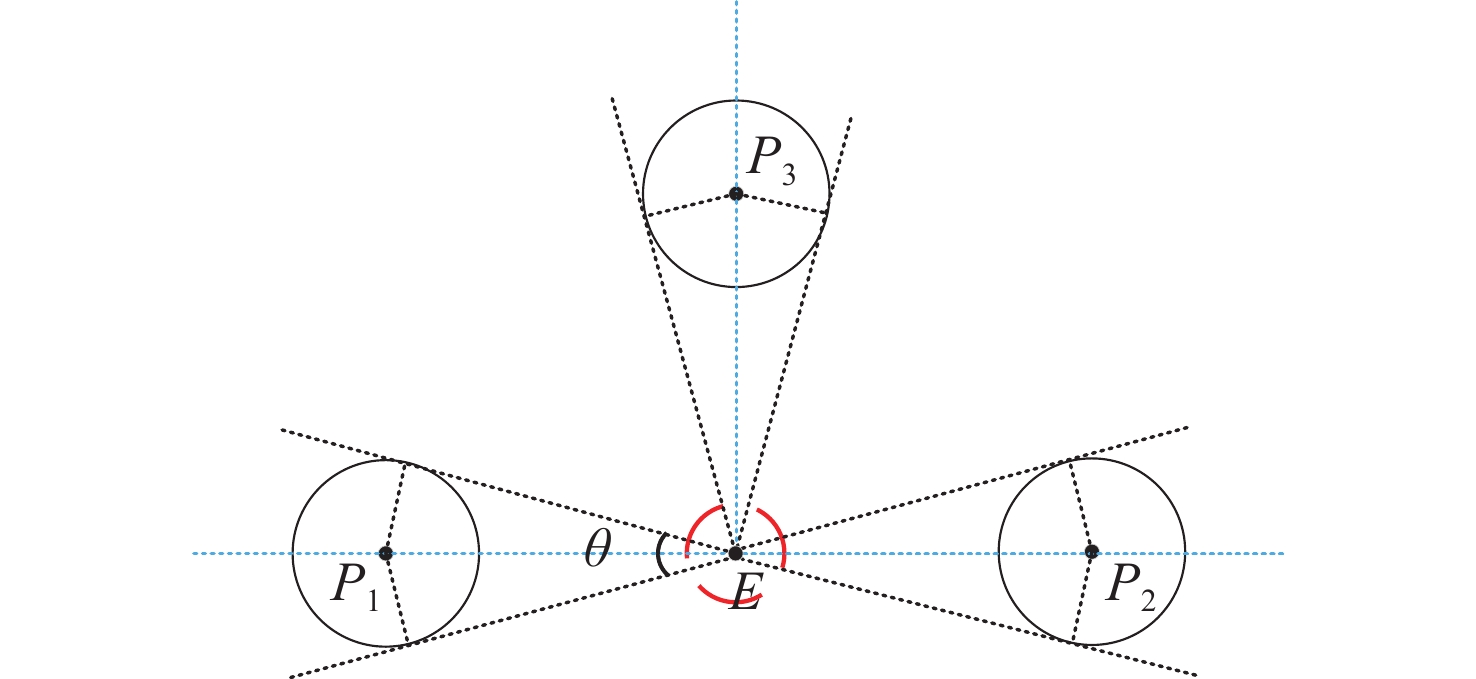
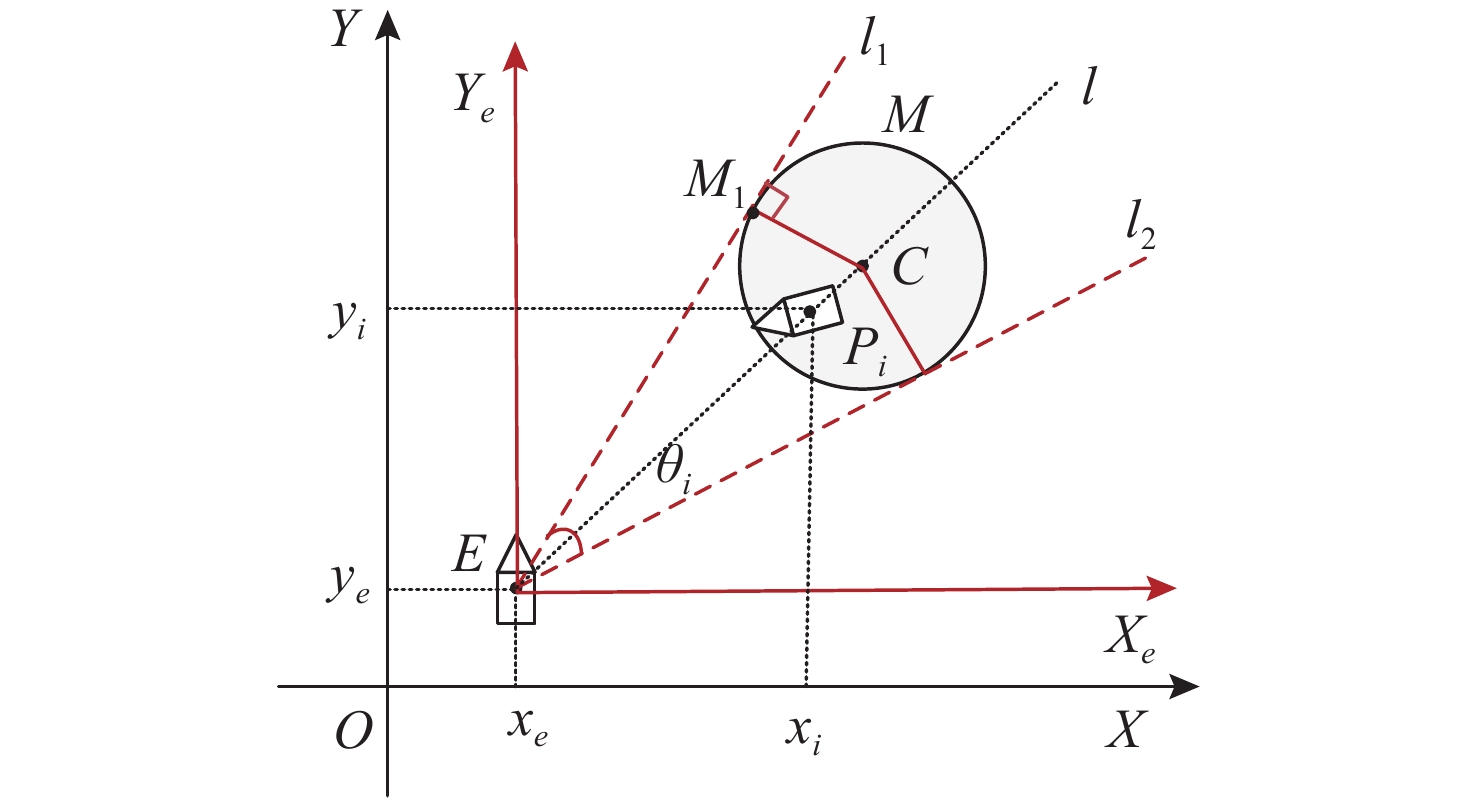
图 3 极坐标系下逃逸角示意图
Figure 3. Schematic diagram of the escape angle in a polar coordinate system
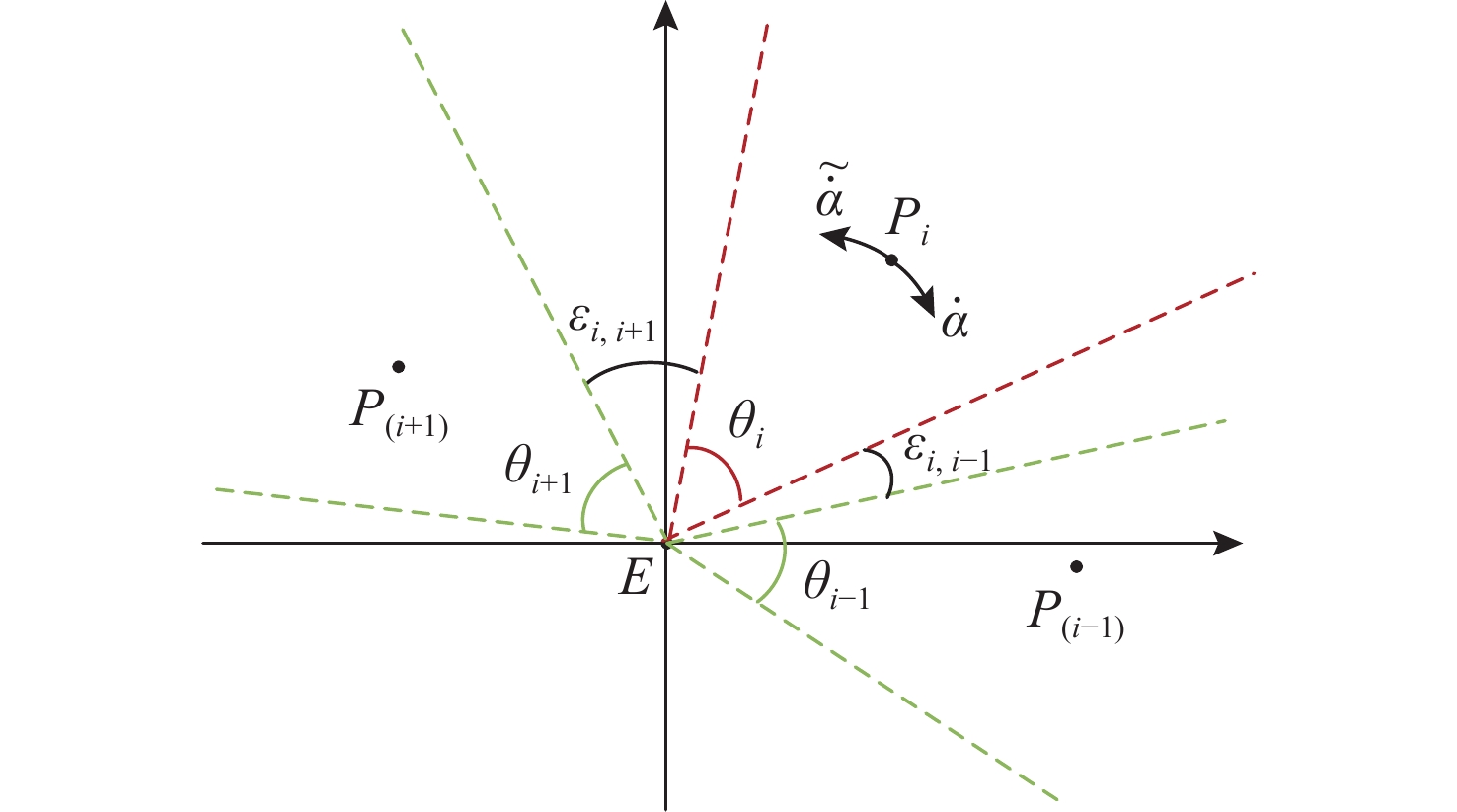
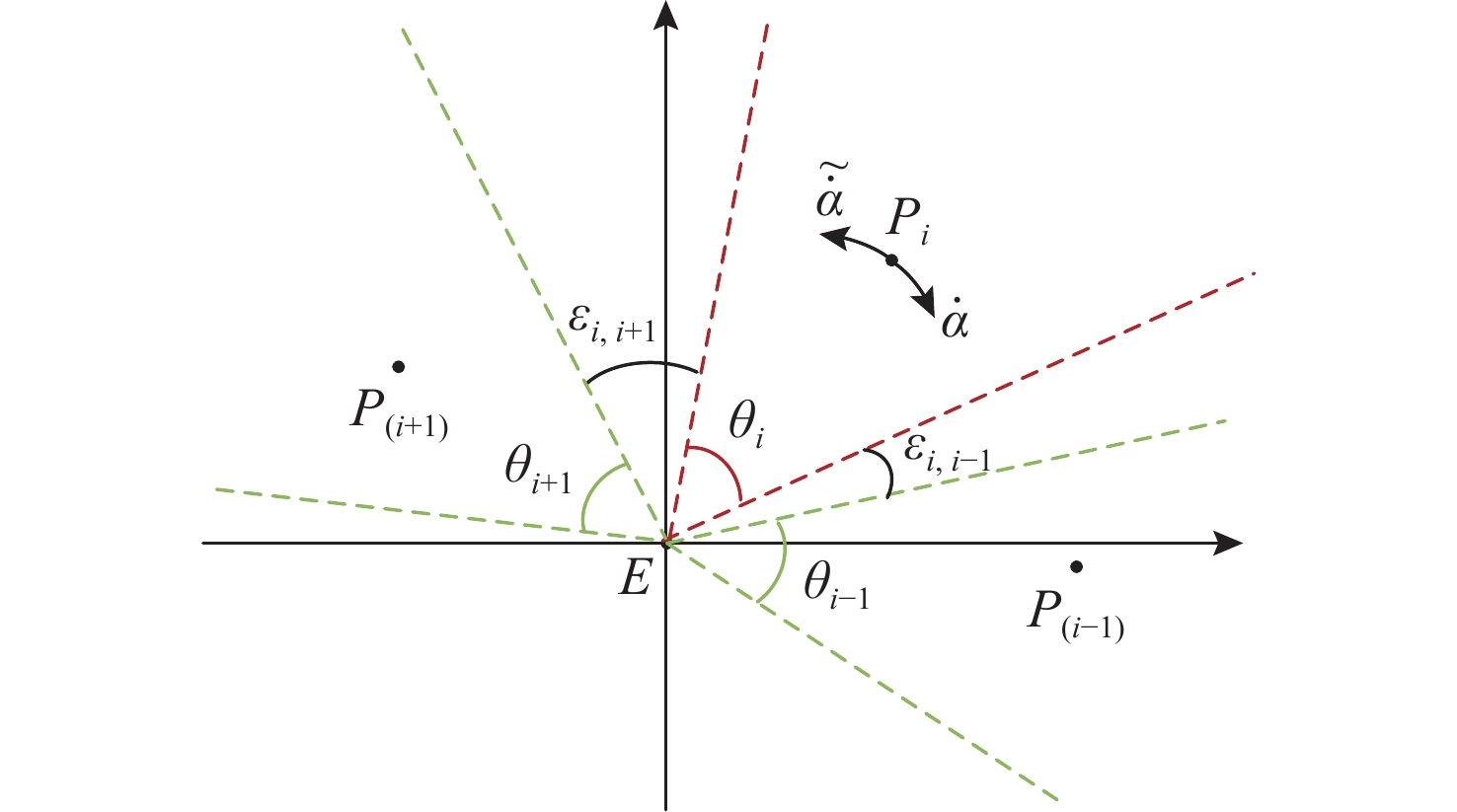
图 4 围捕者使邻居逃逸角“均匀化”示意图
Figure 4. Schematic diagram of the round-up "homogenizing" the escape angle of the neighbor
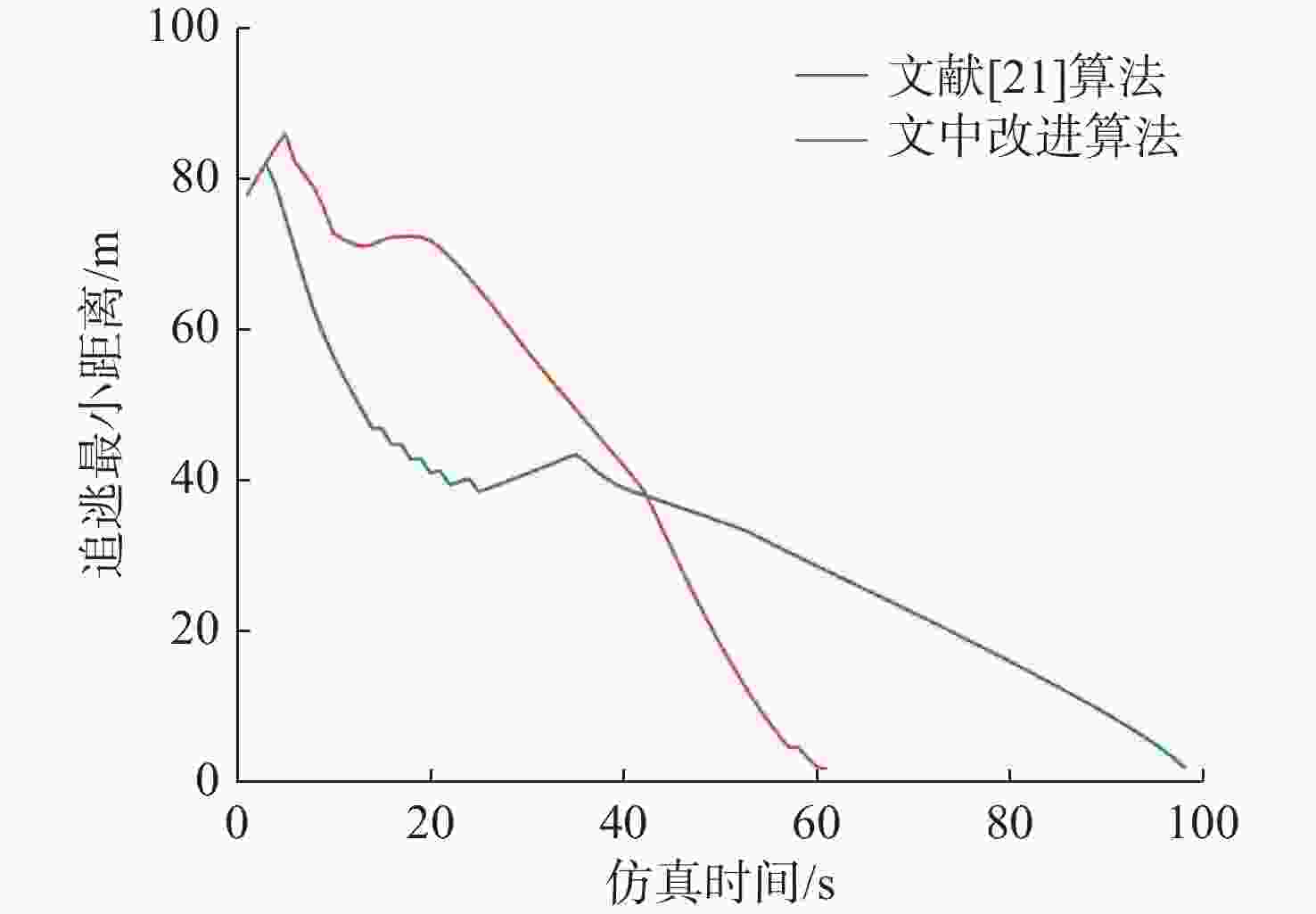
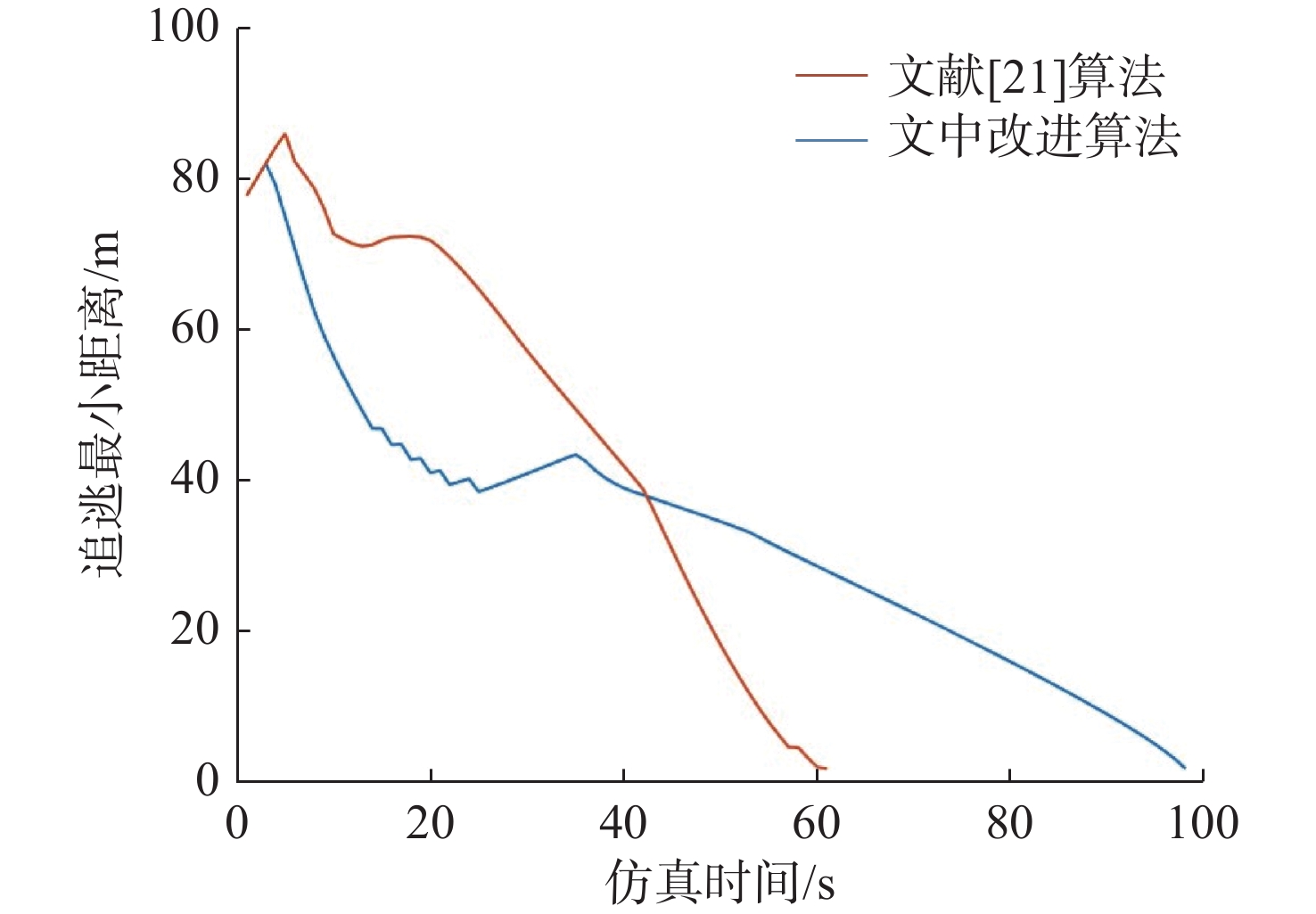
图 9 不同算法追逃最小距离对比图
Figure 9. Comparison chart of the minimum distance of pursuit and escape

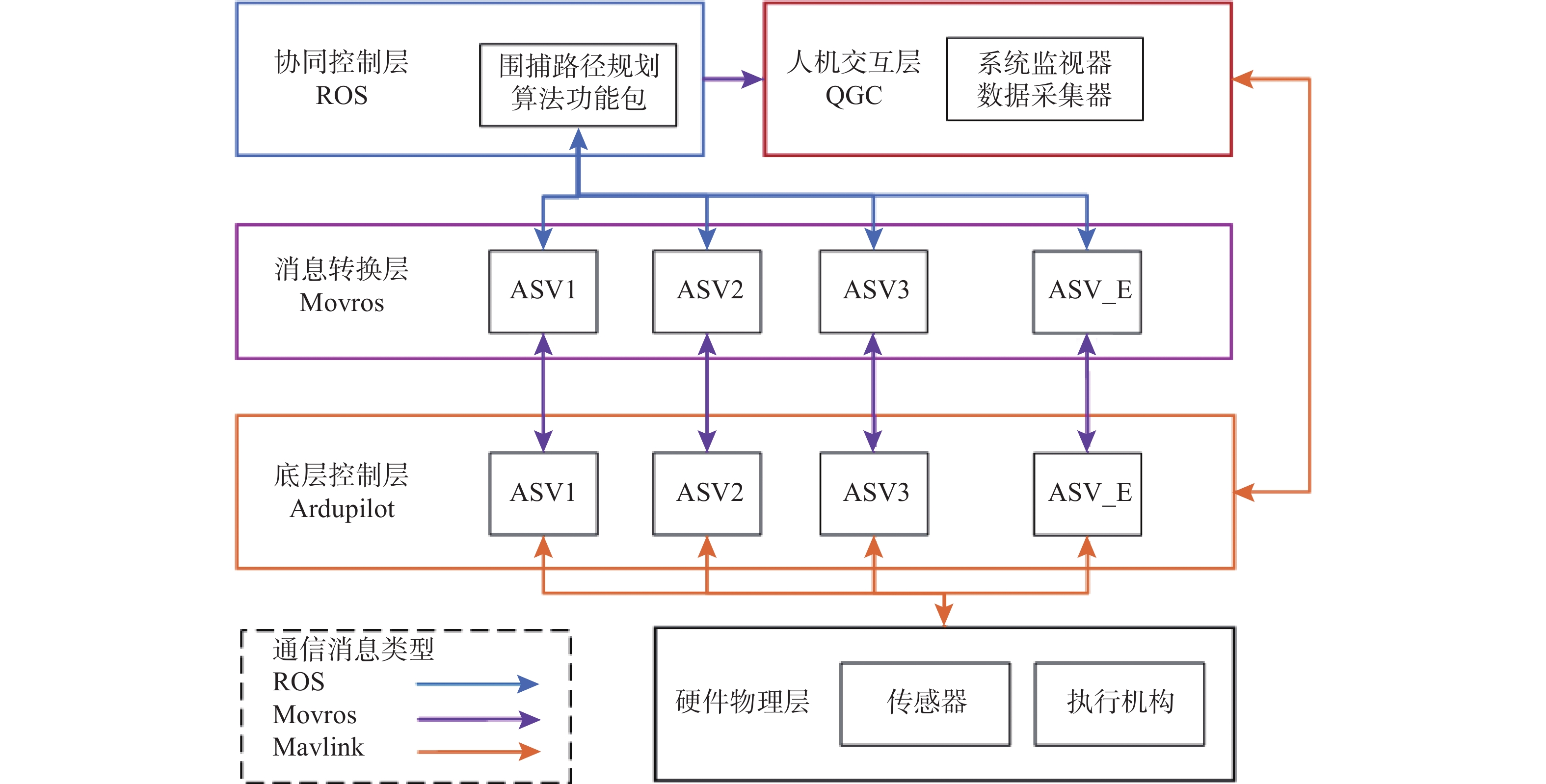
图 12 ASV航行器的Ardupilot底层控制代码架构
Figure 12. The underlying control code architecture of the Ardupilot of the ASV vehicle
表 1 航行器性能参数表
Table 1. Vehicle performance parameters
性能指标 数值 单位 外观尺寸 510×180×115 mm·mm·mm 最大速度 2.2 m/s 最大航时 50 min 电池容量 5 100 mA·h 最大续航里程 4.5 km 最大通讯距离 1.2 km  下载: 导出CSV
下载: 导出CSV
-
[1] Zhou J, Wu X, Lv Y, et al. Recent progress on the study of multi‐vehicle coordination in cooperative attack and defense: An overview[J]. Asian Journal of Control, 2022, 24(2): 794-809. doi: 10.1002/asjc.2685 [2] 胡艳艳, 张莉, 夏辉, 等. 不完全信息下基于微分对策的机动目标协同捕获[J]. 航空学报, 2022, 43(S1): 53-64.Hu Yanyan, Zhang Li, Xia Hui, et al. Cooperative capture of maneuvering targets with incomplete information based on differential game[J]. Journal of Aeronautics and Astronautics, 2022, 43(S1): 53-64. [3] Mu Z, Pan J, Zhou Z, et al. A survey of the pursuit–evasion problem in swarm intelligence[J]. Frontiers of Information Technology & Electronic Engineering, 2023, 24(8): 1093-1116. [4] Makkapati V R, Sun W, Tsiotras P. Optimal evading strategies for two-pursuer/one-evader problems[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(4): 851-862. doi: 10.2514/1.G003070 [5] Wei X, Yang J. Optimal strategies for multiple unmanned aerial vehicles in a pursuit/evasion differential game[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(8): 1799-1806. doi: 10.2514/1.G003480 [6] Isaacs R. Differential games[M]. New York, NY, USA: John Wiley and Sons, 1965. [7] Weintraub I E, Pachter M, Garcia E. An introduction to pursuit-evasion differential games[C]//2020 American Control Conference(ACC). Denver, USA: IEEE, 2020: 1049-1066. [8] Abrahamsen M, Holm J, Rotenberg E, et al. Escaping an infinitude of lions[J]. The American Mathematical Monthly, 2020, 127(10): 880-896. doi: 10.1080/00029890.2020.1820837 [9] Zhou S, Li H, Chen Z. Optimal containment strategies on high-speed evader using multiple pursuers with point-capture[C]//2023 42nd Chinese Control Conference (CCC). Tianjin, China: IEEE, 2023: 1-6. [10] Liang L, Deng F, Peng Z, et al. A differential game for cooperative target defense[J]. Automatica, 2019, 102: 58-71. doi: 10.1016/j.automatica.2018.12.034 [11] Jin S, Qu Z. Pursuit-evasion games with multi-pursuer vs. one fast evader[C]//2010 8th World Congress on Intelligent Control and Automation. Jinan, China: IEEE, 2010: 3184-3189. [12] Fang B, Peng Q, Huang B, et al. Research on high-speed evader vs. multi lower speed pursuers in multi pursuit-evasion games[J]. Information Technology Journal, 2012, 11(8): 989. doi: 10.3923/itj.2012.989.997 [13] Wang X, Cruz Jr J B, Chen G, et al. Formation control in multi-player pursuit evasion game with superior evaders[C]//Defense Transformation and Net-Centric Systems 2007. Orlando, Florida, USA: SPIE, 2007: 324-332. [14] Ramana M V, Kothari M. Pursuit-evasion games of high speed evader[J]. Journal of intelligent & robotic systems, 2017, 85: 293-306. [15] Wang H, Yue Q, Liu J. Research on pursuit-evasion games with multiple heterogeneous pursuers and a high speed evader[C]//The 27th Chinese control and decision conference(CCDC). Qingdao, China: IEEE, 2015: 4366-4370. [16] Vechalapu T R. A trapping pursuit strategy for capturing a high speed evader[C]//AIAA SciTech forum and exposition. Florida, U. S. : IEEE, 2020: 1-20. [17] Fang X, Wang C, Xie L, et al. Cooperative pursuit with multi-pursuer and one faster free-moving evader[J]. IEEE transactions on cybernetics, 2020, 52(3): 1405-1414. [18] Fang X, Cheng C, Xie L. 3-d multi-player pursuit-evasion game with a faster evader[C]//2020 39th Chinese Control Conference(CCC). Shenyang, China: IEEE, 2020: 118-123. [19] Yan F, Jiang J, Di K, et al. Multiagent pursuit-evasion problem with the pursuers moving at uncertain speeds[J]. Journal of Intelligent & Robotic Systems, 2019, 95: 119-135. [20] Han Y, Hong W, Yun Y D, et al. Research on multi-UUV pursuit-evasion games strategies under the condition of strongly manoeuvrable evader[C]//2021 40th Chinese Control Conference(CCC). Shanghai, China: IEEE, 2021: 5504-5511. [21] Wang C, Shi W, Liang L. Cooperative hunting strategy with a superior evader based on differential game[J]. Complexity, 2022, 2022: 1-9. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 11
- HTML全文浏览量: 4
- PDF下载量: 4
- 被引次数: 0




