

Ground Calibration Method of Magnetic Compensation Parameters forMagnetometer Towfish
-
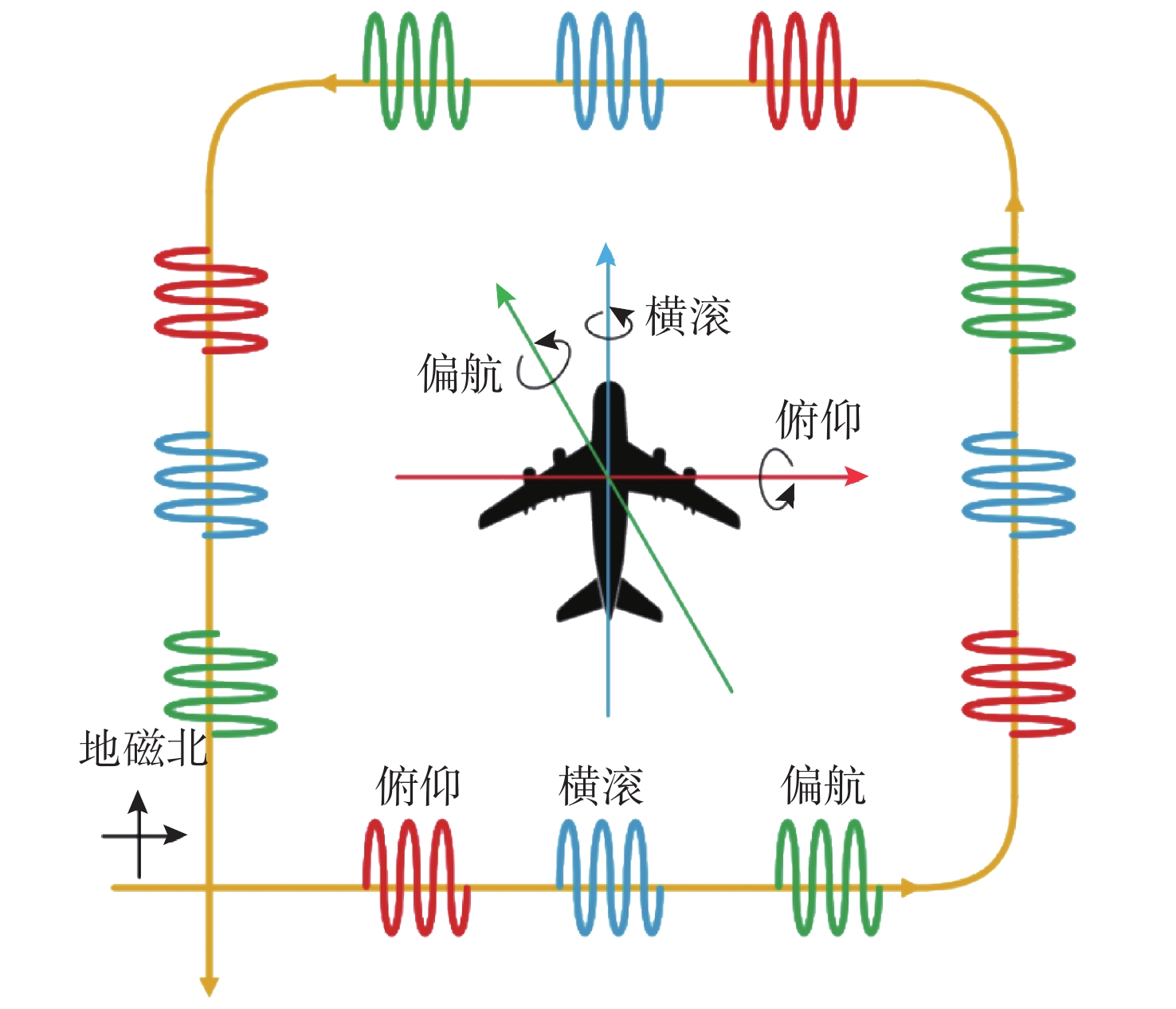
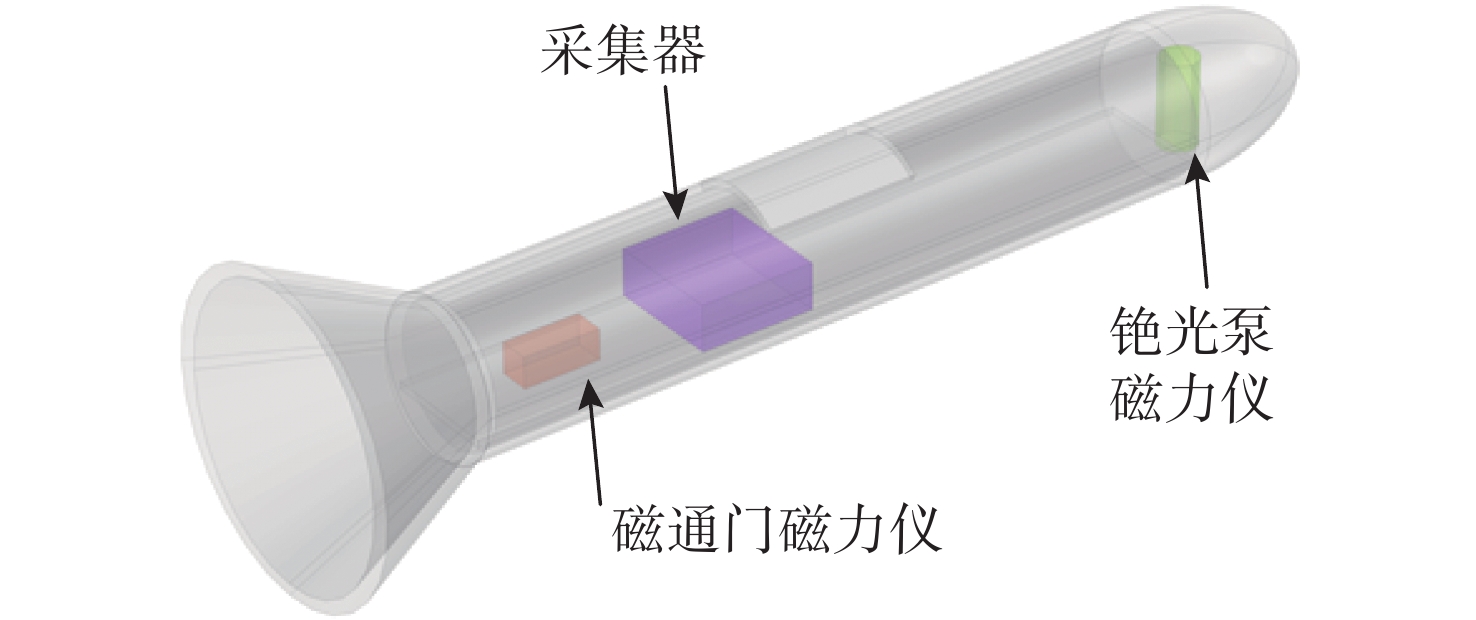
摘要: 磁探拖体可用于水中、空中拖曳式磁场测量, 尽管拖体中没有动力系统, 但是仍然有显著的磁场干扰存在, 因此也需要进行磁干扰补偿, 但拖体自身不具有机动能力, 无法通过类似航空平台的机动校准方法进行磁补偿参数的求解。文中针对这一问题提出了一种适用于磁探拖体的磁补偿参数地面校准方法, 设计了地面磁补偿校准装置, 对实施场地的磁场环境进行了一定约束, 在与航空磁补偿参数校准方案等效性分析的基础上, 设计了适用于磁探拖体的地面校准方法, 并开展了实际环境下的地面校准试验和动态噪声试验验证。试验结果表明, 该方法针对拖曳式磁测装置的磁补偿参数校准具有良好的效果, 磁补偿参数质量可以和航空平台磁补偿参数相当, 试验中磁补偿校准改善比大于16。Abstract: Magnetometer towfish can be utilized for underwater and aerial towed magnetic field measurements. Although they lack propulsion systems, significant magnetic interference persists, necessitating magnetic interference compensation. However, as towfish possess no maneuverability, they cannot employ calibration methods akin to those of airborne platforms for determining magnetic compensation parameters. This article proposed a ground calibration method of magnetic compensation parameters for magnetometer towfish and designed a ground magnetic interference calibration device to impose certain constraints on the magnetic field environment. Based on the equivalence analysis with the aeromagnetic compensation parameter calibration scheme, a ground calibration method tailored for magnetometer towfish was designed and subsequently subjected to ground calibration experiments and dynamic noise validation in actual environments. Experimental results reveal that the method possesses remarkable efficacy for calibrating magnetic compensation parameters of towfish by using towed magnetic field measurement devices, yielding a quality akin to that of aircraft platforms. The improvement ratio for magnetic compensation calibration exceeds 16.
-
表 1 试验基本情况
Table 1. Experimental situation
磁场梯度/(nT/m) 参数编号 补偿前标准差 试验情况 0.2 A1 4.725 3组机动 A2 4.756 3组机动 A3 4.712 5组机动 A4 4.817 5组机动 0.1 B1 4.799 3组机动 B2 4.782 5组机动 1.5 C1 5.108 5组机动 0.5 D1 4.992 5组机动  下载: 导出CSV
下载: 导出CSV
表 2 地面校准试验结果
Table 2. Experimental result of ground calibration
场地梯度/(nT/m) 参数编号 补偿后标准差 改善比 0.2 A1 0.187 25.160 A2 0.219 21.617 A3 0.241 19.481 A4 0.265 18.132 0.1 B1 0.176 27.175 B2 0.162 29.382 1.5 C1 1.275 3.696 0.5 D1 0.310 16.092
下载: 导出CSV
-
[1] Chen K, Zhao Q, Deng M, et al. Seawater motion-induced electromagnetic noise reduction in marine magneto telluric data using current meters[J]. Earth Planets and Space, 2020, 72(1): 1-11. doi: 10.1186/s40623-019-1127-2 [2] Liu W, Liu Z, Zhang Q, et al. Magnetic anomaly signal detection using parallel monostable stochastic resonance system[J]. IEEE Access, 2020, 99: 162230-37. [3] 徐震寰, 李予国, 罗鸣. 船舶轴频电磁场信号的海底测量及其特性分析[J]. 哈尔滨工程大学学报, 2018, 39(4): 652-657. doi: 10.11990/jheu.201612066Xu Zhenhuan, Li Yuguo, Luo Ming. Seabed survey and property analysis of ship’s shaft-rate electromagnetic signal[J]. Journal of Harbin Engineering University, 2018, 39(4): 652-657. doi: 10.11990/jheu.201612066 [4] Leliak, P. Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft[J]. IRE Transactions on Aerospace and Navigational Electronics, 1961, ANE-8(3): 95-105. doi: 10.1109/TANE3.1961.4201799 [5] Dou Z, Ren K, Qi H, et al. A novel real-time aeromagnetic compensation method based on RLSQ[C]//2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing. Kitakyushu, Japan: IEEE, 2014. [6] Cracchiolo T, Beaujean P P, Dhanak M, et al. Placement and denoising of total magnetic field sensors onboard an AUV in support of geophysical navigation[C]//Oceans 2022. Hampton Roads, USA: IEEE, 2022. [7] 于振涛, 吕俊伟, 毕波, 等. 四面体磁梯度张量系统的载体磁干扰补偿方法[J]. 物理学报, 2014, 63(11): 110702. doi: 10.7498/aps.63.110702Yu Zhentao, Lü Junwei, Bi Bo, et al. A vehicle magnetic noise compensation method for the tetrahedron magnetic gradiometer[J]. Acta Physica Sinica, 2014, 63(11): 110702. doi: 10.7498/aps.63.110702 [8] Dou Z, Han Q, Niu X, et al. An aeromagnetic compensation coefficient-estimating method robust to geomagnetic gradient[J]. IEEE Geoscience & Remote Sensing Letters, 2016, 13(5): 611-615. [9] Zheng Y, Li S, Xing K, et al. Unmanned aerial vehicles for magnetic surveys: A review on platform selection and interference suppression[J]. Drones, 2021, 5(3): 93. doi: 10.3390/drones5030093 [10] Li Y, Han Q. On the correction of the positional error caused by the coordinate origin in Tolley-Lawson model[J]. IEEE Geoscience & Remote Sensing Letters, 2022, 19: 1-5. [11] Thébault E, Finlay C C, Beggan C D, et al. International geomagnetic reference Field: the 12th generation[J]. Earth Planets and Space, 2015, 67(1): 1-19. doi: 10.1186/s40623-014-0143-5 -





 点击查看大图
点击查看大图
图(6) / 表(2)
计量
- 文章访问数: 105
- HTML全文浏览量: 16
- PDF下载量: 37
- 被引次数: 0




