

Ship Collision Avoidance Path Planning Based on Dynamic Domain Potential Field
-
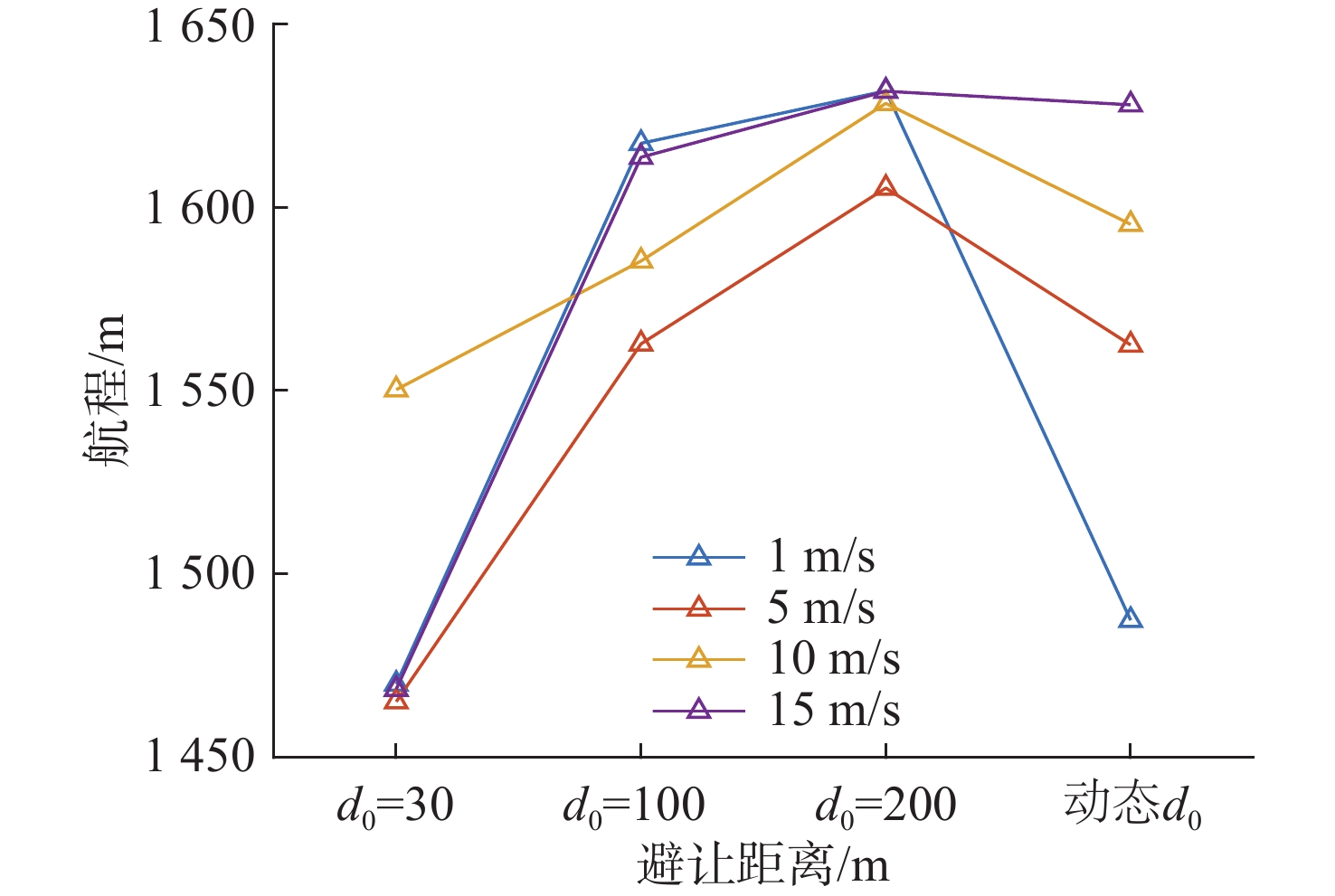
摘要: 针对传统人工势场避碰路径规划在避让距离和避碰时机方面的局限性, 提出一种基于改进人工势场法的动态船舶避碰路径规划方法。采用四元安全领域改进了人工势场中固定的障碍物斥力作用范围, 构建一种根据船速动态调整的避让领域范围来代替固定阈值的障碍物斥力势场范围, 实现避让距离由静转动;提出一种设定半径自适应的子目标设定方法, 并且加入可变调整角, 以调整子目标点与障碍物的距离, 从而解决避碰大型障碍物时出现的局部最小值和路径抖动问题。改进后算法可根据不同船速构建自适应的避让领域, 实现船舶避让距离的动态调整, 在保证安全的前提下减少因过于保守的避让距离带来的不必要的碰撞威胁和避碰行为, 在速度为1 m/s时, 动态领域势场法相对于障碍物斥力势场范围分别为100、200 m的传统人工势场法分别节省航程的8%和9%。通过真实海图仿真试验验证了所提避碰路径规划算法的可行性, 能够实现在有大型障碍物的复杂场景中船舶的安全避碰路径规划。Abstract: In view of the limitations of traditional artificial potential field collision avoidance path planning in terms of collision avoidance distance and collision avoidance opportunity, a dynamic ship collision avoidance path planning method based on an improved artificial potential field method was proposed. By using the quaternion safety domain, the repulsion force action range of the fixed obstacle in the artificial potential field was improved, and a collision avoidance domain range that was dynamically adjusted according to the ship speed was constructed to replace the potential field range of obstacle repulsion force with a fixed threshold, so as to realize the collision avoidance distance from static to dynamic. A variable adjustment angle was added to the sub-target setting method with an adaptive setting radius to change the distance between the sub-target point and the obstacle, so as to solve the problem of local minimum and path jitter when there are large obstacles. The improved algorithm could build adaptive collision avoidance domains according to different ship speeds and realize dynamic adjustment of ship collision avoidance distance. With the goal of ensuring safety, the improved algorithm could reduce unnecessary collision threats and collision avoidance behaviors caused by an excessively conservative collision avoidance distance. When the velocity is 1 m/s, the dynamic domain potential field method saves 8% and 9% of the voyage, respectively, compared with the traditional artificial potential field method with the potential field range of repulsion force of 100 and 200 m. Real chart simulation experiments confirmed the viability of the proposed collision avoidance path planning algorithm and realized the safe collision avoidance path planning of ships in complicated scenarios with large obstacles.
-

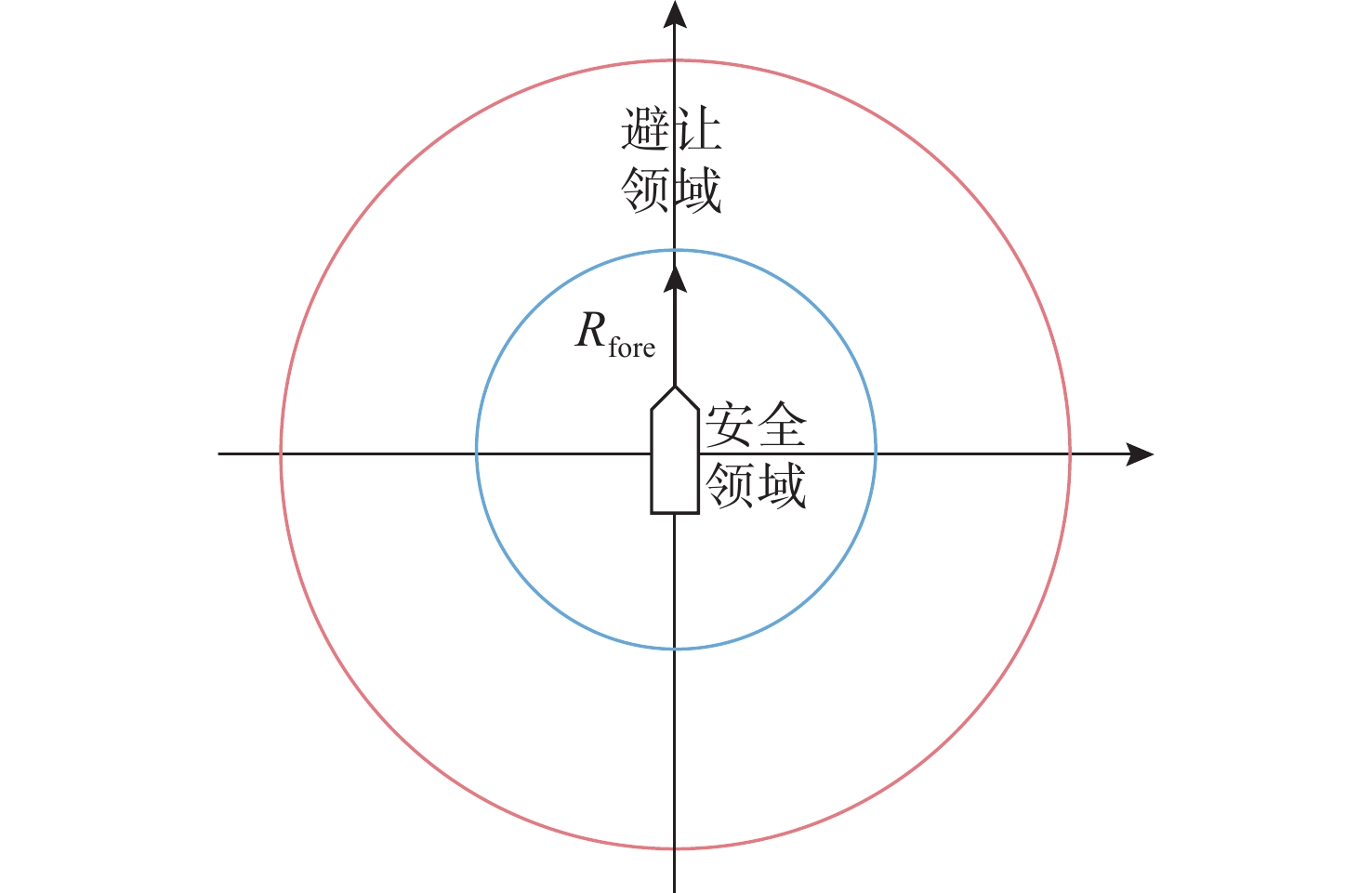
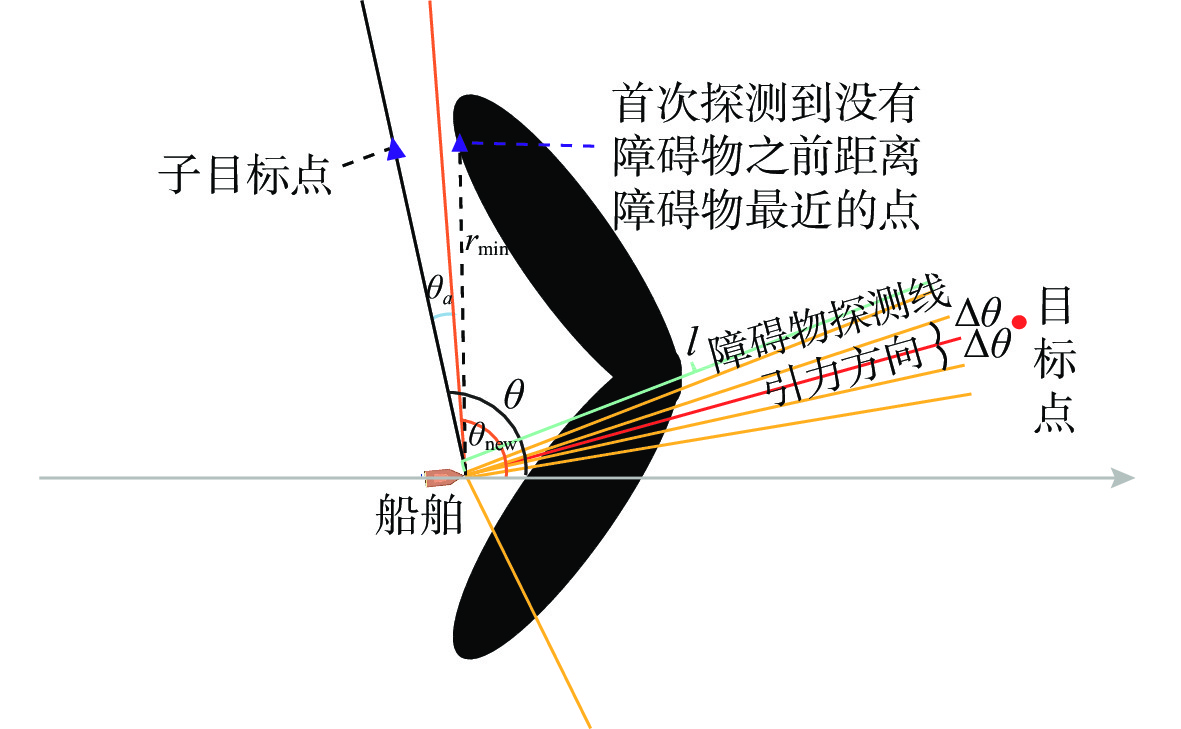
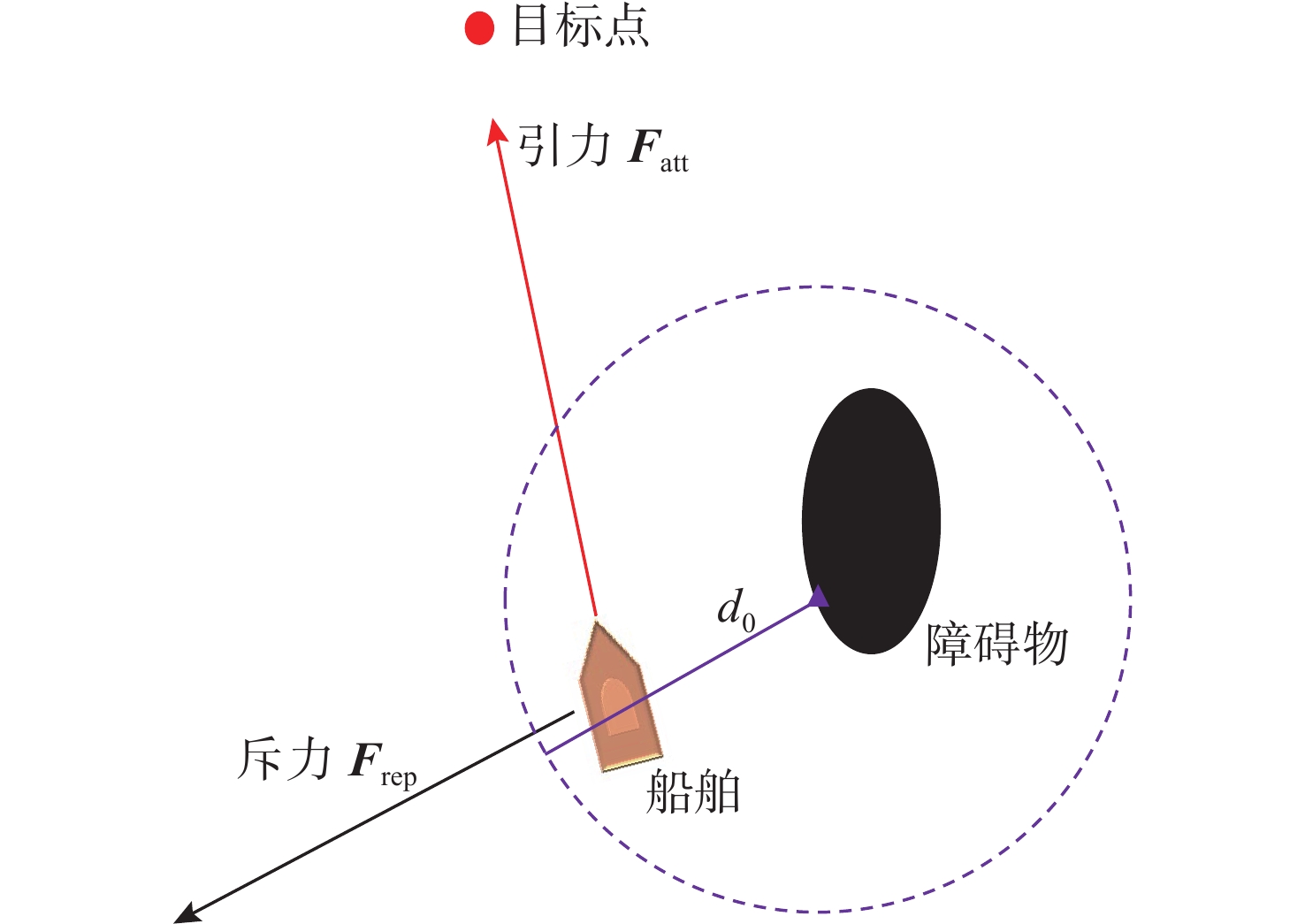
图 1 人工势场避碰路径规划示意图
Figure 1. Artificial potential field collision avoidance path planning

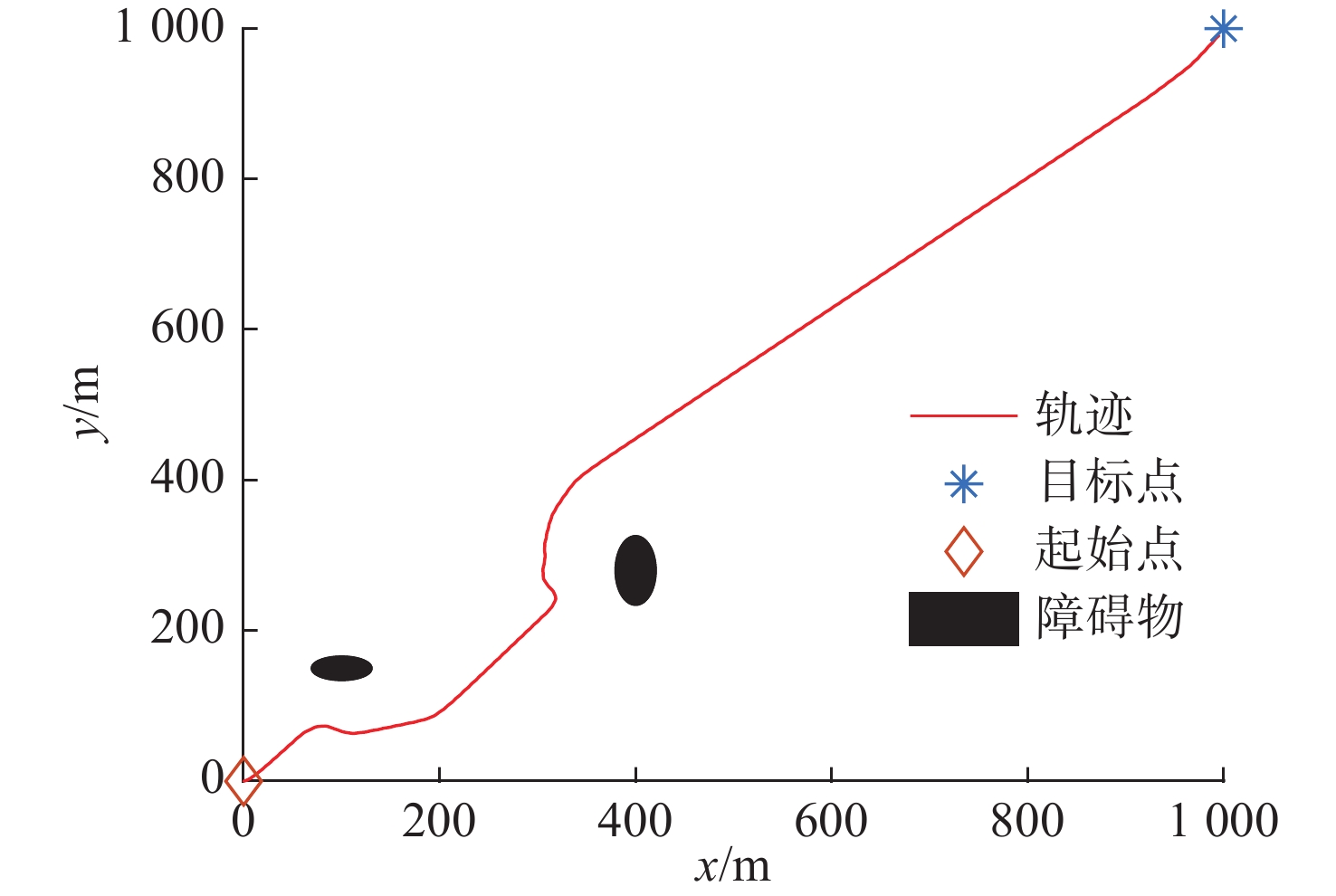
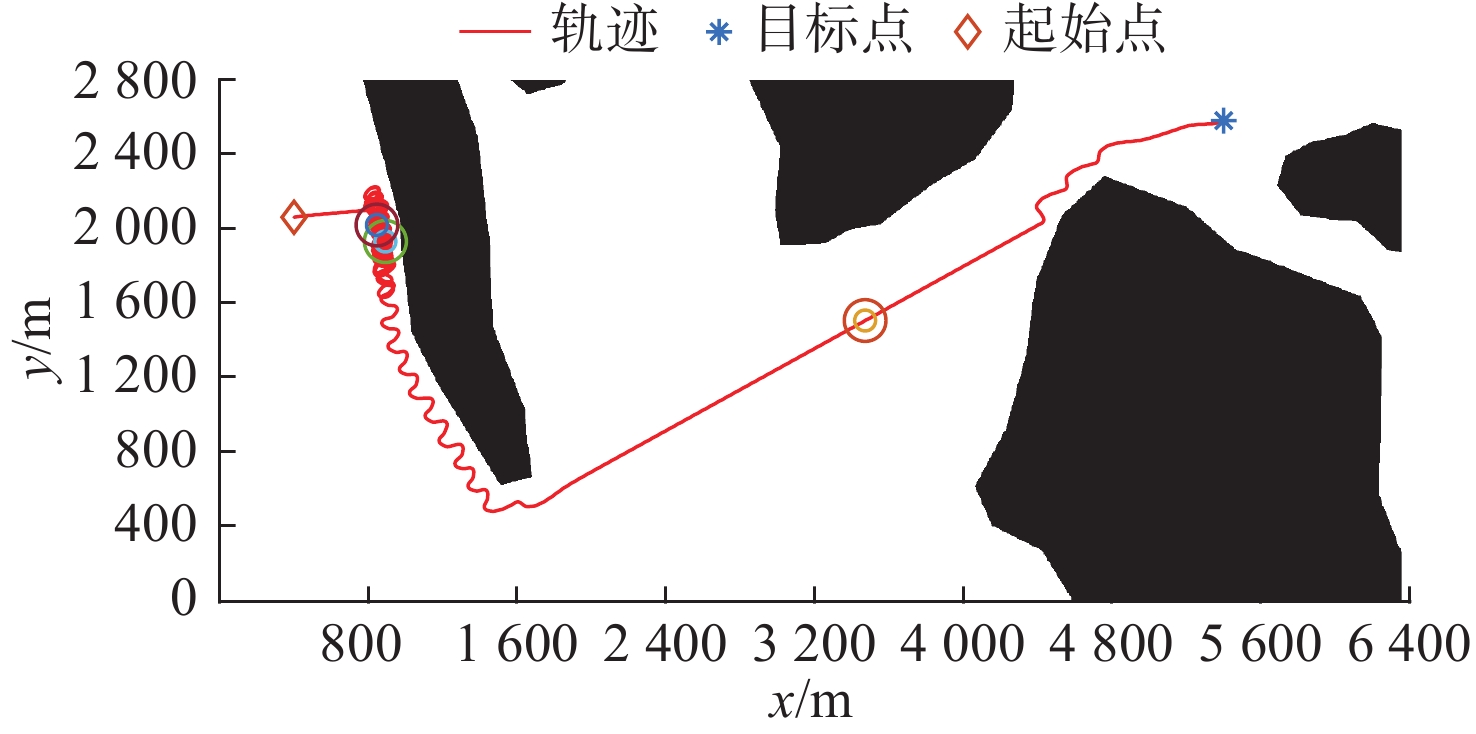
图 7 传统人工势场避碰路径仿真结果
Figure 7. Simulation results of collision avoidance path of traditional artificial potential field
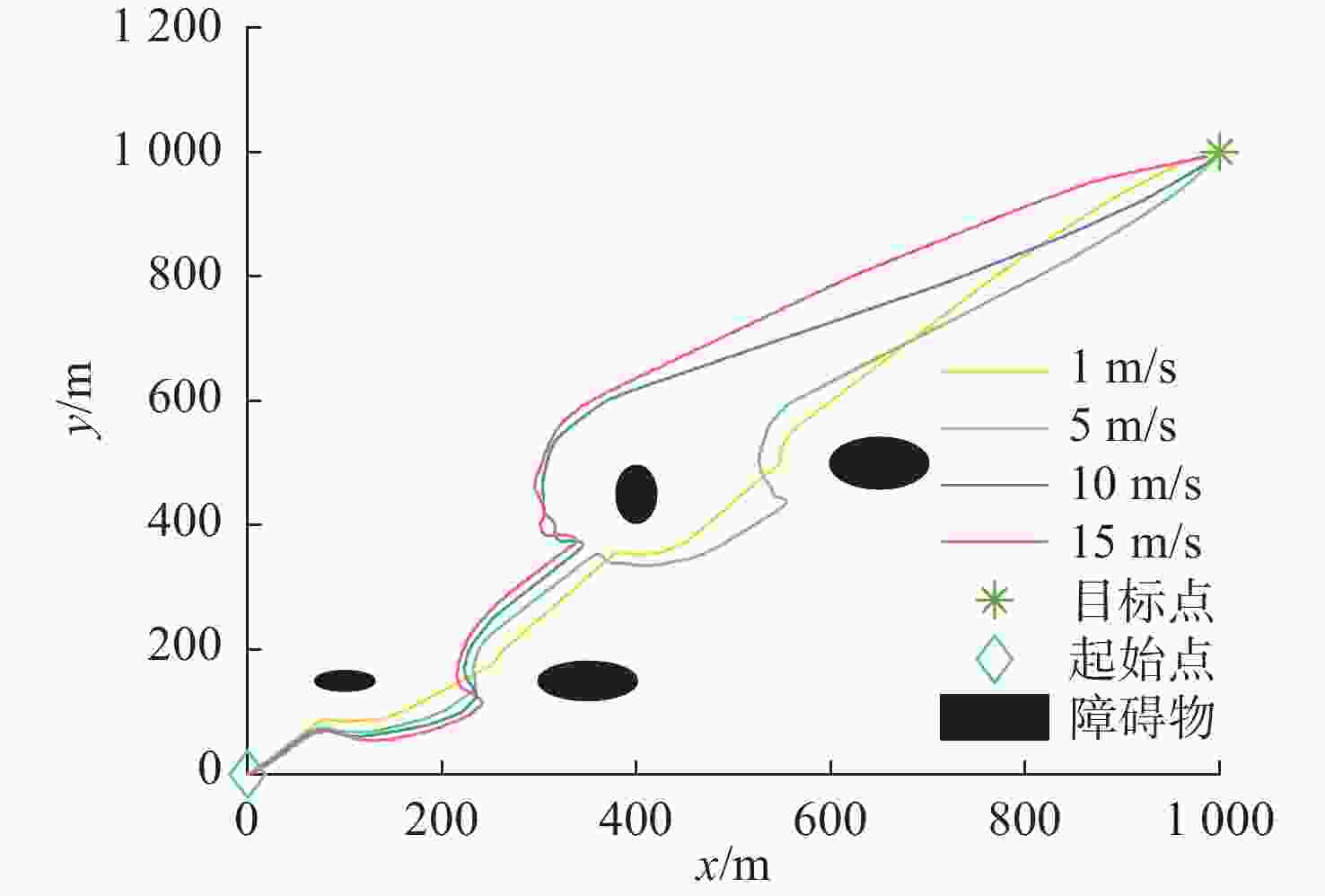
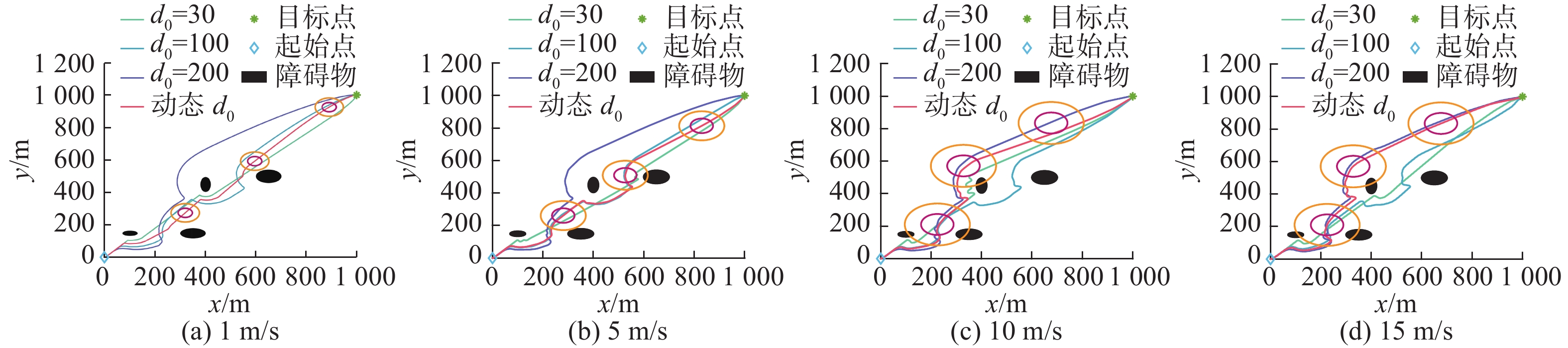
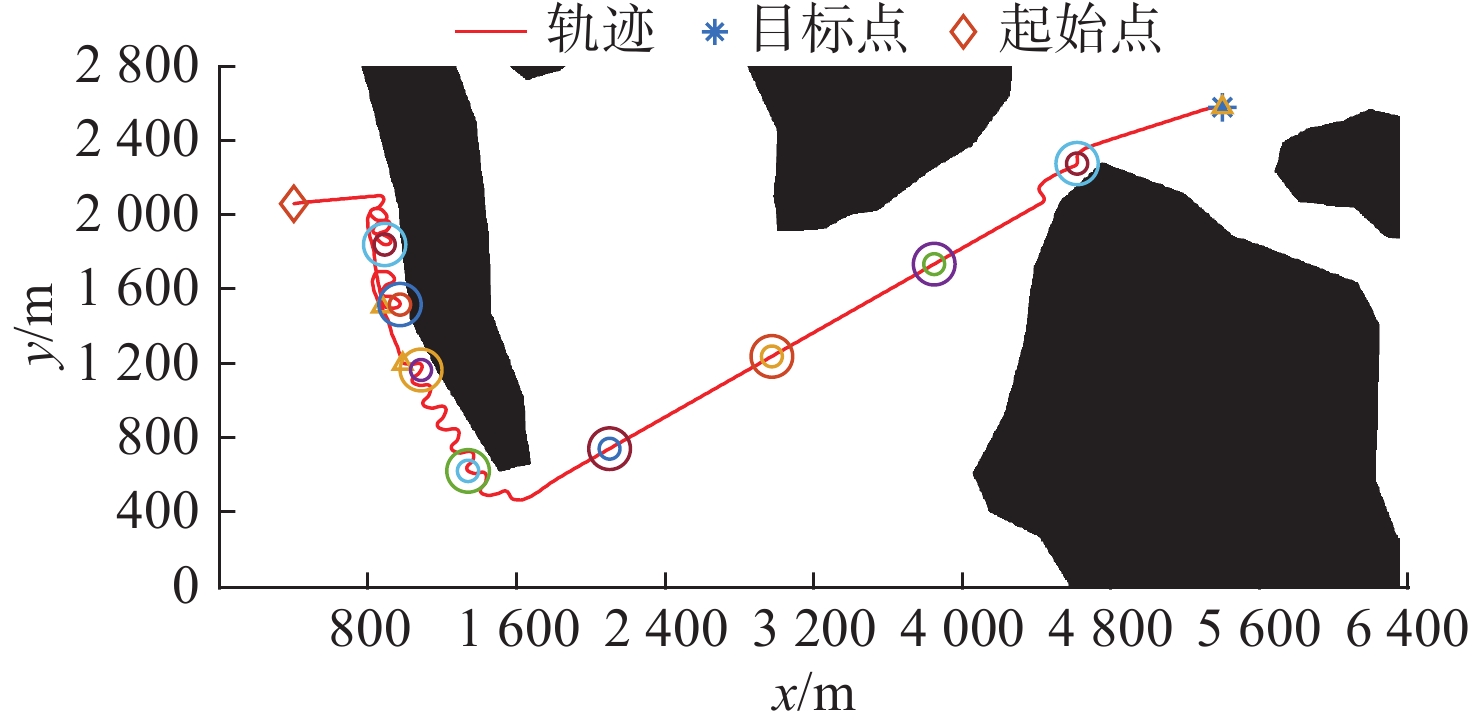
图 8 基于动态领域改进的人工势场法仿真结果
Figure 8. Simulation results of improved artificial potential field method based on dynamic domain

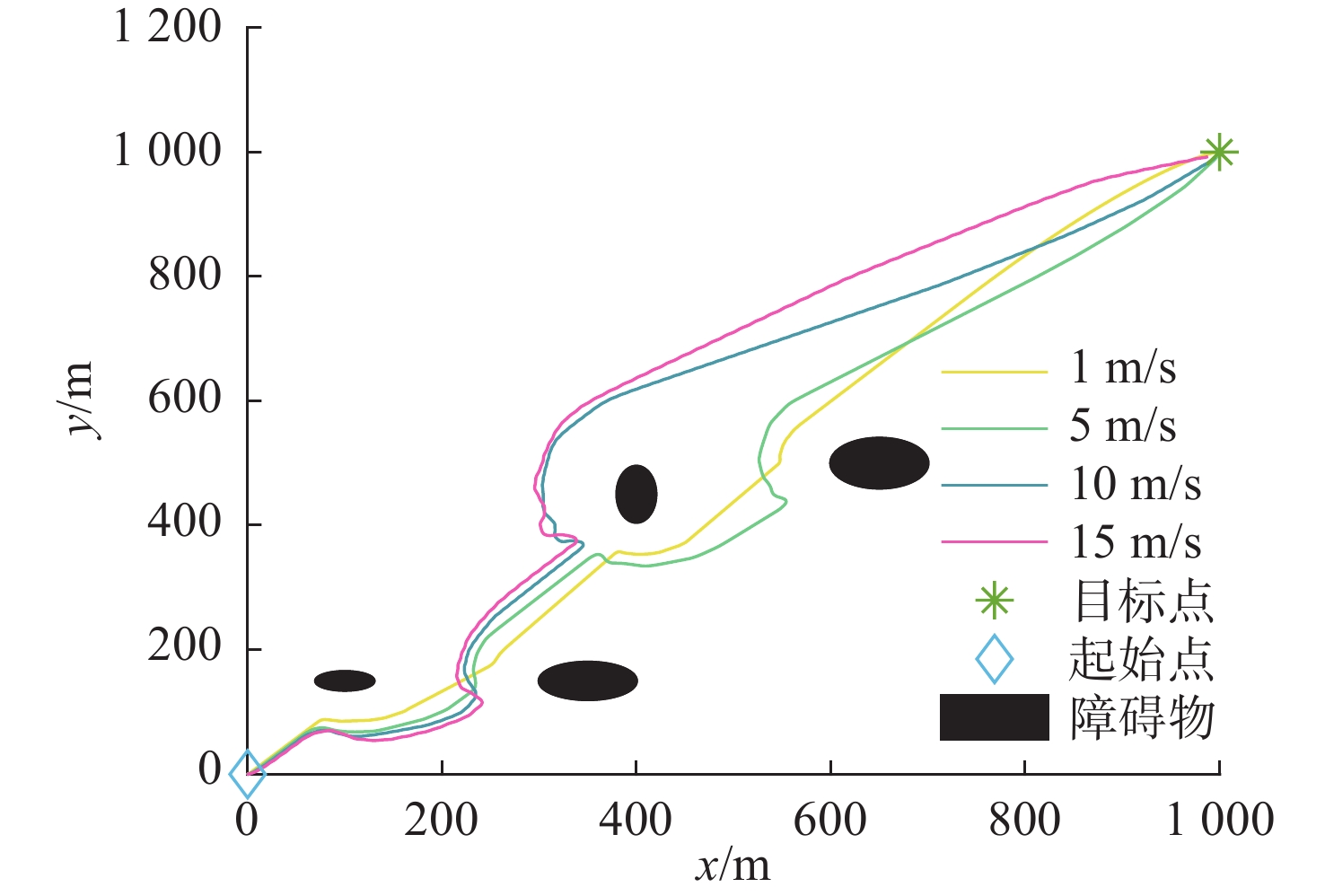
图 9 不同速度下避碰试验路径对比
Figure 9. Comparison of collision avoidance paths at different speeds
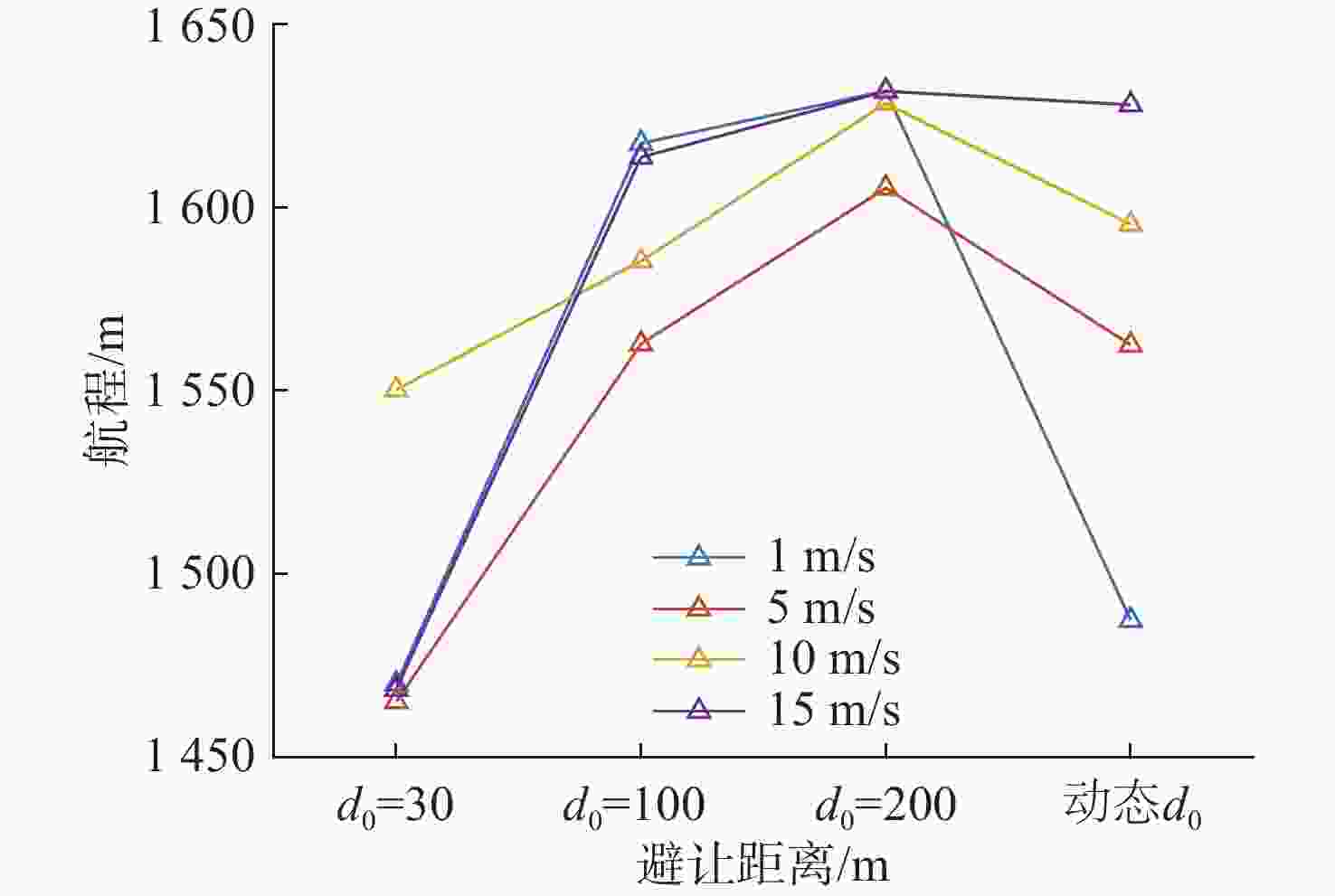
图 10 不同速度下避碰试验航程比较
Figure 10. Comparison of collision avoidance voyages at different speeds
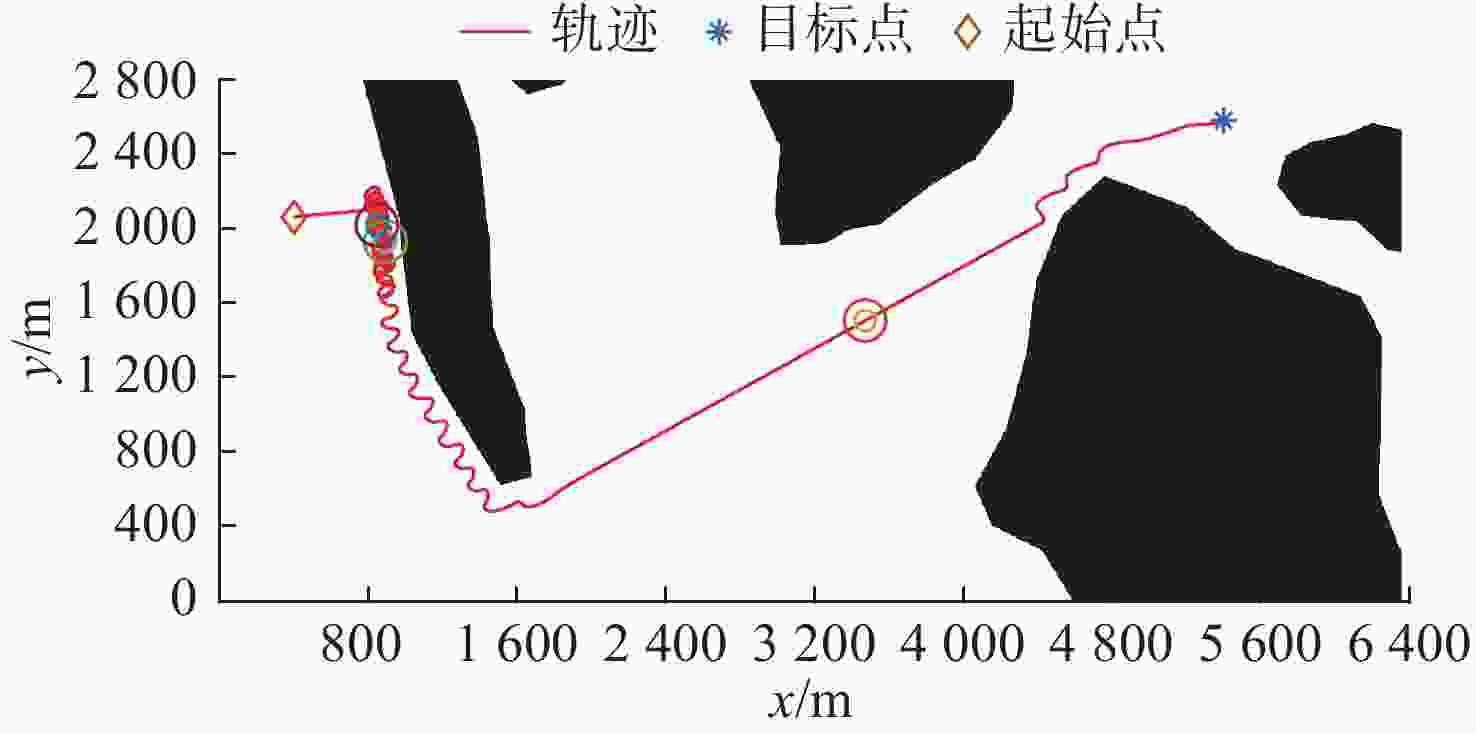
图 11 真实海图环境船舶避碰路径规划仿真结果
Figure 11. Simulation results of ship collision avoidance path planning in real chart environment
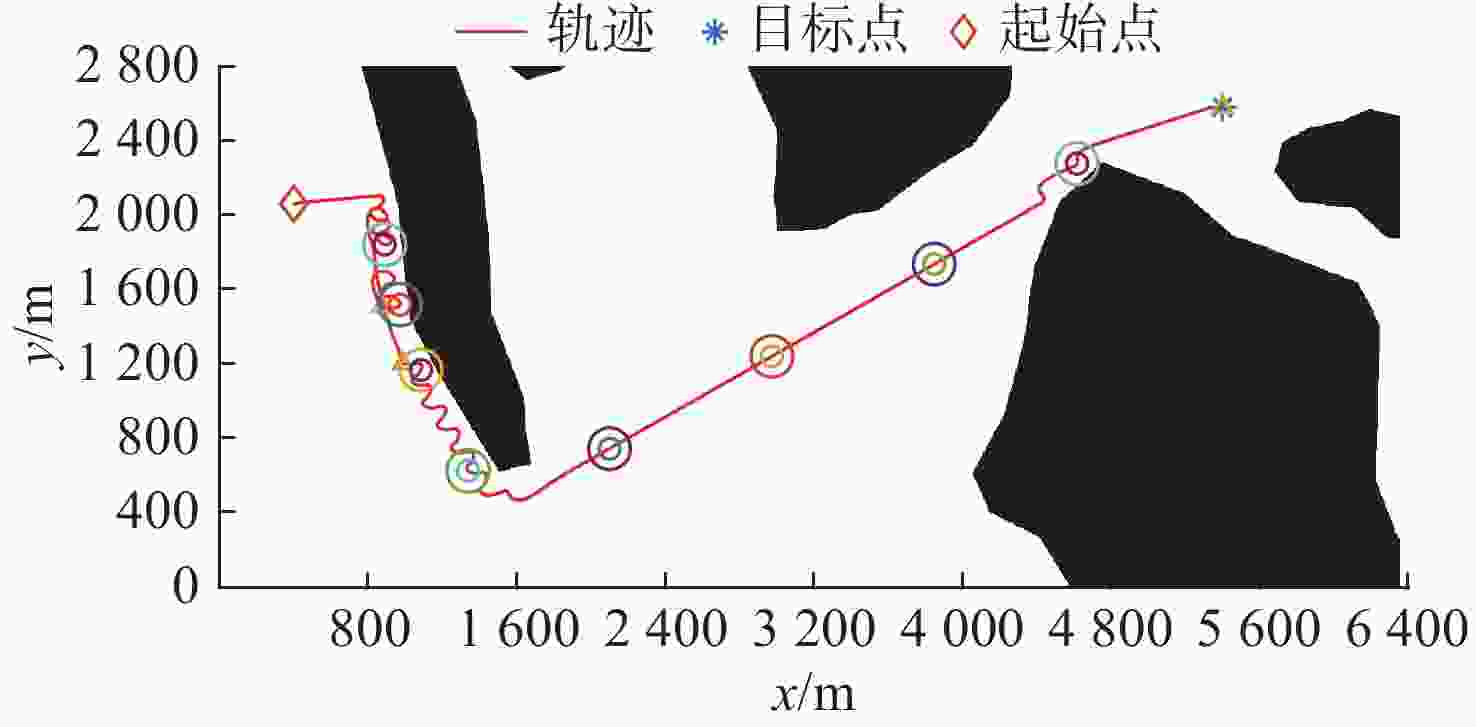
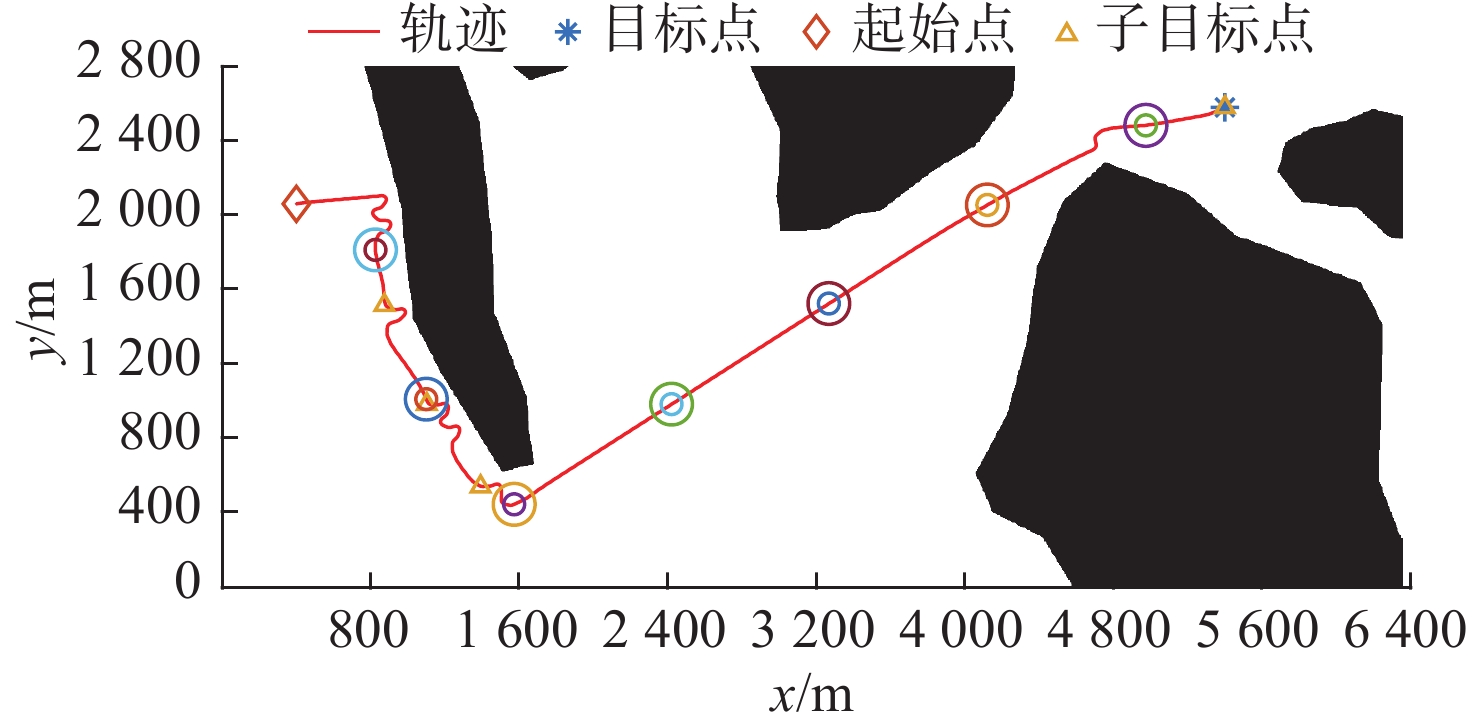
图 12 采取子目标点法的真实海图环境仿真结果
Figure 12. Simulation results of real chart environment with sub-target point method
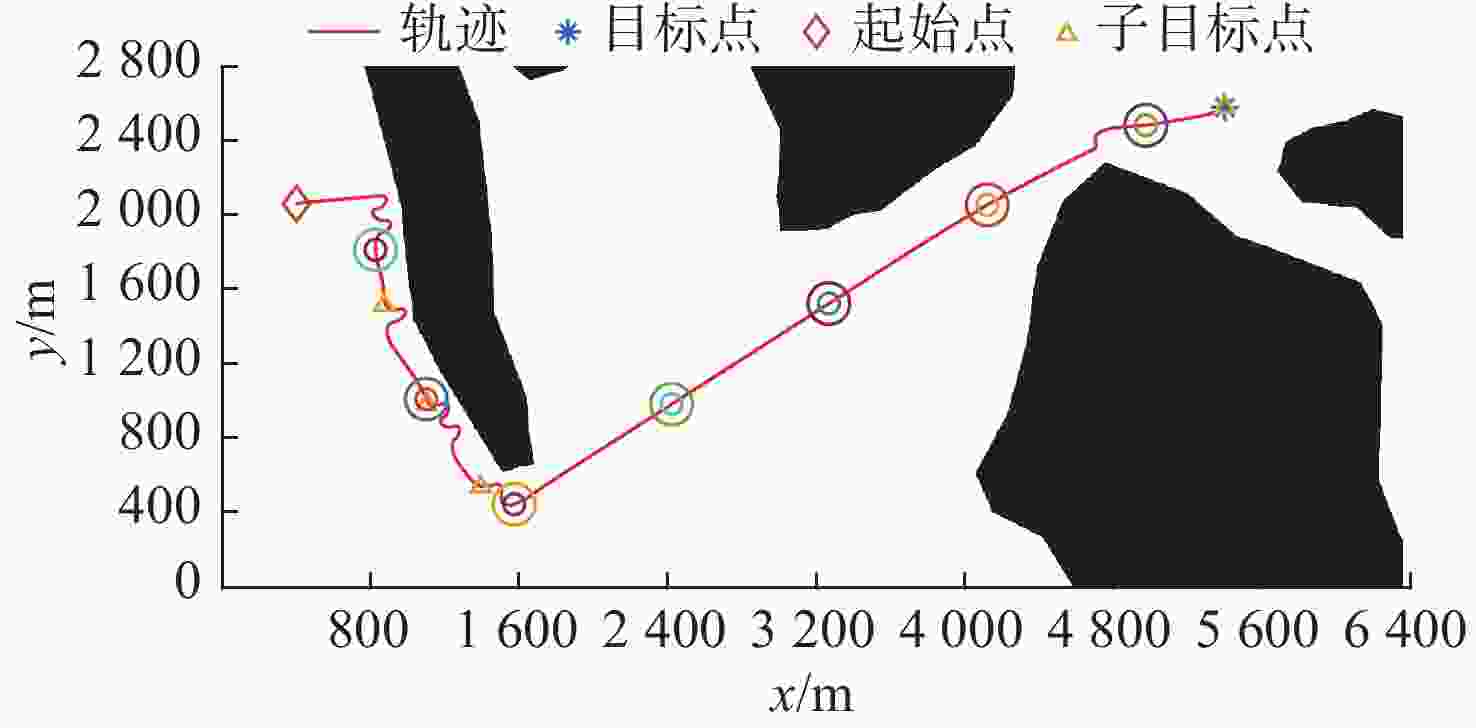
图 13 优化后的真实海图环境仿真结果
Figure 13. Real chart environment simulation results after optimization
-
[1] 杨少龙, 黄金, 向先波, 等. 基于置信椭圆的无人艇区域覆盖搜寻规划优化[J]. 系统工程与电子技术, 2022, 44(7): 2263-2269.Yang Shaolong, Huang Jin, Xiang Xianbo, et al. Optimization of USV area coverage path planning based on confidence ellipsoid[J]. Systems Engineering and Electronics, 2022, 44(7): 2263-2269. [2] 郭银景, 鲍建康, 刘琦, 等. AUV实时避障算法研究进展[J]. 水下无人系统学报, 2020, 28(4): 351-358,369.Guo Yinjing, Bao Jiankang, Liu Qi, et al. Research progress of real-time obstacle avoidance algorithms for unmanned undersea vehicle: A review[J]. Journal of Unmanned Undersea Systems, 2020, 28(4): 351-358,369. [3] 李文华, 张君彦, 林珊颖, 等. 水面自主船舶技术发展路径[J]. 船舶工程, 2019, 41(7): 64-73.Li Wenhua, Zhang Junyan, Lin Shanying, et al. The development path of maritime autonomous surface ships technology[J]. Ship Engineering, 2019, 41(7): 64-73. [4] 倪生科, 刘正江, 蔡垚, 等. 基于遗传算法的船舶避碰决策辅助[J]. 上海海事大学学报, 2017, 38(1): 12-15.Ni Shengke, Liu Zhengjiang, Cai Yao, et al. Ship collision avoidance decision aids based on genetic algorithm[J]. Journal of Shanghai Maritime University, 2017, 38(1): 12-15. [5] Guo H, Mao Z, Ding W, et al. Optimal search path planning for unmanned surface vehicle based on an improved genetic algorithm[J]. Computers & Electrical Engineering, 2019, 79: 106467. [6] 龚铭凡, 徐海祥, 冯辉, 等. 基于改进蚁群算法的智能船舶路径规划[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(6): 1072-1076.Gong Mingfan, Xu Haixiang, Feng Hui, et al. Intelligent ship path planning based on improved ant colony algorithm[J] Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44(6): 1072-1076. [7] 马静, 王佳斌, 张雪. A*算法在无人车路径规划中的应用[J]. 计算机技术与发展, 2016, 26(11): 153-156.Ma Jing, Wang Jiabin, Zhang Xue. Application of A* algorithm in unmanned vehicle path planning[J]. Compu- ter Technology and Development, 2016, 26(11): 153-156. [8] Zha M, Wang Z, Feng J, et al. Unmanned vehicle route planning based on improved artificial potential field method[J]. Journal of Physics: Conference Series, 2020, 1453(1): 012059. doi: 10.1088/1742-6596/1453/1/012059 [9] 张琪, 田甜, 栾天宇, 等. 基于改进人工势场算法的无人船路径规划[J]. 舰船科学技术, 2022, 44(9): 63-68, 78.Zhang Qi, Tian Tian, Luan Tianyu, et al. Research on path planning of unmanned boat routes based on improved artificial potential field algorithm[J]. Ship Science And Technology, 2022, 44(9): 63-68, 78. [10] 宁君, 马昊冉, 李铁山. 基于改进人工势场法的船舶路径规划与跟踪控制[J]. 哈尔滨工程大学学报, 2022, 43(10): 1-10.Ning Jun, Ma Haoran, Li Tieshan. Underactuated surface vessel path planning and following control based on improved artificial potential field method[J]. Journal of Harbin Engineering University, 2022, 43(10): 1-10. [11] 韩君. 基于人工势场法的船舶自动导航算法设计[J]. 舰船科学技术, 2018, 40(6): 91-93.Han Jun. Design of ship automatic navigation algorithm based on artificial potential field[J]. Ship Science and Technology, 2018, 40(6): 91-93. [12] 陈超, 耿沛文, 张新慈. 基于改进人工势场法的水面无人艇路径规划研究[J]. 船舶工程, 2015, 37(9): 72-75.Chen Chao, Geng Peiwen, Zhang Xinci. Path planning research on unmanned surface vessel based on improved potential field[J]. Ship Engineering, 2015, 37(9): 72-75. [13] 马小轩, 吴韵哲, 吴浩峻, 等. 基于改进人工势场法的水下自主航行器路径规划[J]. 船舶工程, 2021, 43(9): 89-93, 100. doi: 10.13788/j.cnki.cbgc.2021.09.16Ma Xiaoxuan, Wu Yunzhe, Wu Haojun, et al. Path planning of autonomous underwater vehicle based on improved artificial potential field method[J]. Ship Engineering, 2021, 43(9): 89-93, 100. doi: 10.13788/j.cnki.cbgc.2021.09.16 [14] Yu J, Deng W, Zhao Z, et al. A hybrid path planning method for an unmanned cruise ship in water quality sampling[J]. IEEE Access, 2019, 7: 87127-87140. doi: 10.1109/ACCESS.2019.2925894 [15] Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[C]//1985 IEEE International Conference on Robotics and Automation. St. Louis, MO, USA: IEEE, 1985: 500-505. [16] Wang N. An intelligent spatial collision risk based on the quaternion ship domain[J]. The Journal of Navigation, 2010, 63(4): 733-749. doi: 10.1017/S0373463310000202 [17] Zhang S, Shen Y, Cui W. Path planning of mobile robot based on improved artificial potential field method[C]//International Conference on Machine Tool Technology and Mechatronics Engineering. Guilin, Guangxi, China: IEEE, 2014. [18] Myre H. Collision avoidance for autonomous surface vehicles using velocity obstacle and set-based guidance[D]. Trondheim: NTNU, 2016. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 93
- HTML全文浏览量: 23
- PDF下载量: 34
- 被引次数: 0




