

A Cooperative Search Algorithm Based on Improved Probability Map of Target Acoustic Information for Multiple UUVs
-
摘要: 针对未知环境中多无人水下航行器(UUV)协同目标搜索问题, 提出一种基于目标声信息改进概率图的多UUV协同搜索方法。建立了包含目标声场信息、UUV占用信息、目标存在概率及环境确定度的改进概率图, 使UUV对动态搜索环境及目标信息的感知更加准确、全面; 提出了一种基于学习机制和自适应参数调节机制的改进粒子群优化(PSO)算法, 将基于线性种群规模减小和广泛学习机制的自适应差分进化算法的突变策略引入PSO算法, 通过生成自适应调整参数的突变粒子, 增加粒子多样性, 在多UUV目标搜索应用中, 减少了局部最优, 提高搜索效率; 设计开发了仿真程序, 应用蒙特卡洛仿真方法验证分析了多UUV搜索效能。仿真结果表明, 所提出的多UUV协同搜索方法与基于传统概率图的PSO搜索算法相比, 同样条件下找到目标所花费的时间更少、找到的目标数量更多, 对动态目标搜索具有较明显的优势。Abstract: In view of the cooperative target search of multiple unmanned undersea vehicles (UUVs) in unknown environments, a cooperative search algorithm based on an improved probability map of target acoustic information for multiple UUVs was proposed. An improved probability map based on target acoustic information, UUV occupancy information, target existence probability, and environment certainty was established, making the UUV’s perception of dynamic search environment and target information more accurate and comprehensive. In addition, an improved particle swarm optimization(PSO) algorithm based on a learning mechanism and adaptive parameter adjustment mechanism was put forward, which introduced the mutation strategy of adaptive differential evolution algorithm based on linear population size reduction and extensive learning mechanism into the PSO algorithm. By generating mutated particles with adaptive adjustment parameters and increasing particle diversity, local optimality was reduced, and search efficiency was improved in multi-UUV target search applications. The simulation program was developed, and the Monte Carlo method was employed to analyze the multi-UUV search efficiency. Simulation results show that compared with the PSO search algorithm based on traditional probability maps, the proposed multi-UUV collaborative search method takes less time and finds more targets under the same conditions, so it has obvious advantages in dynamic target search.
-
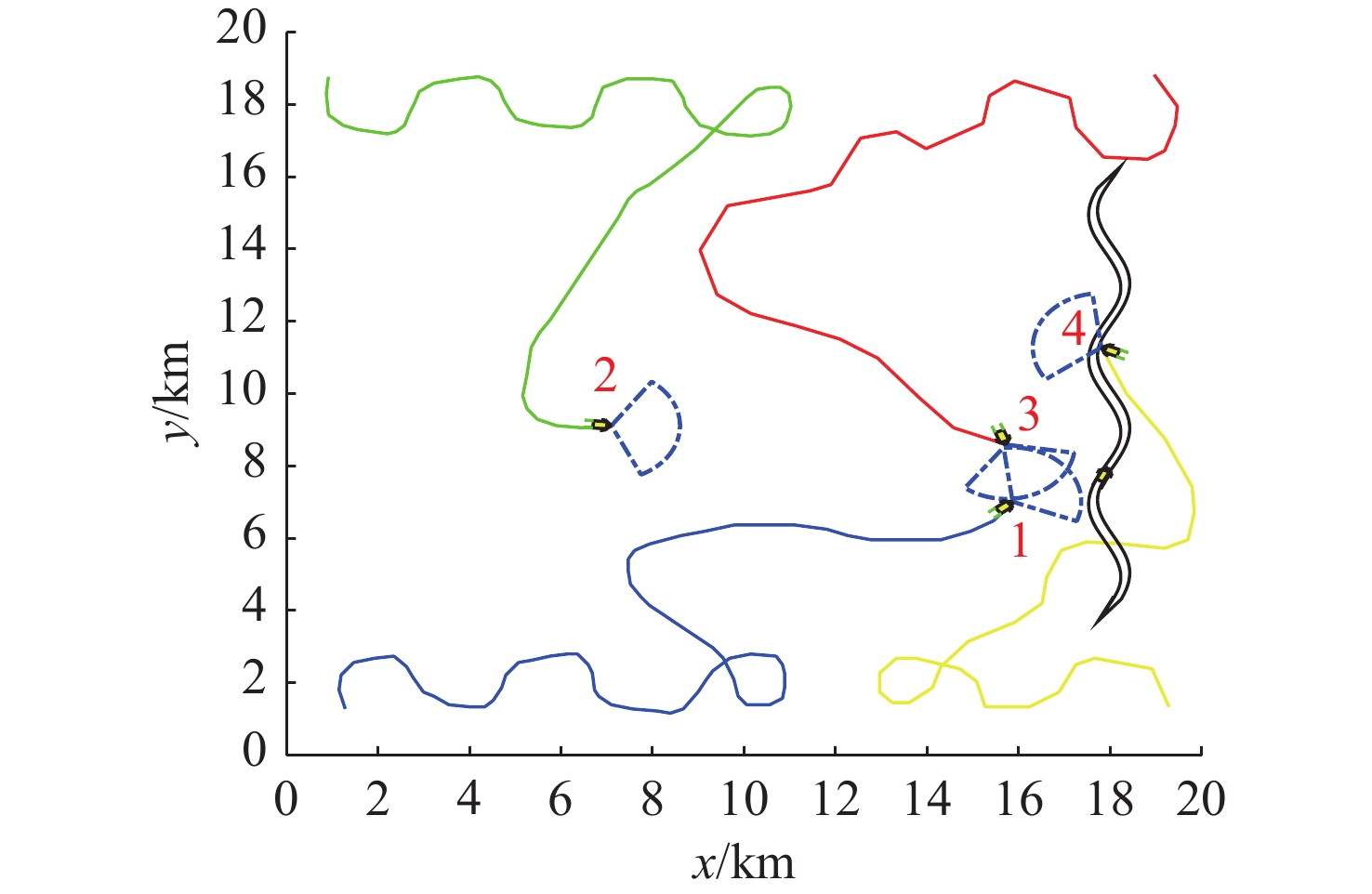
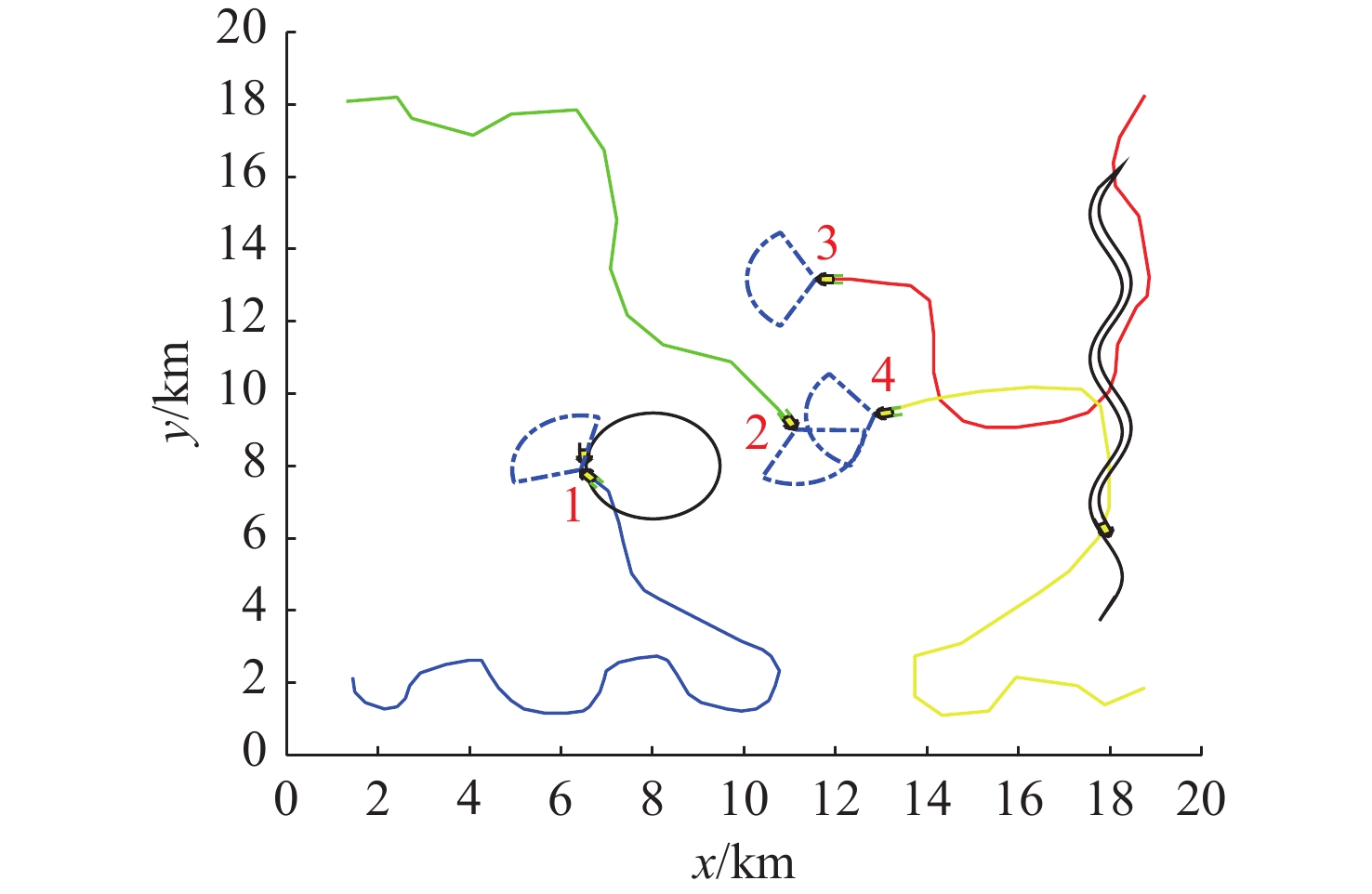
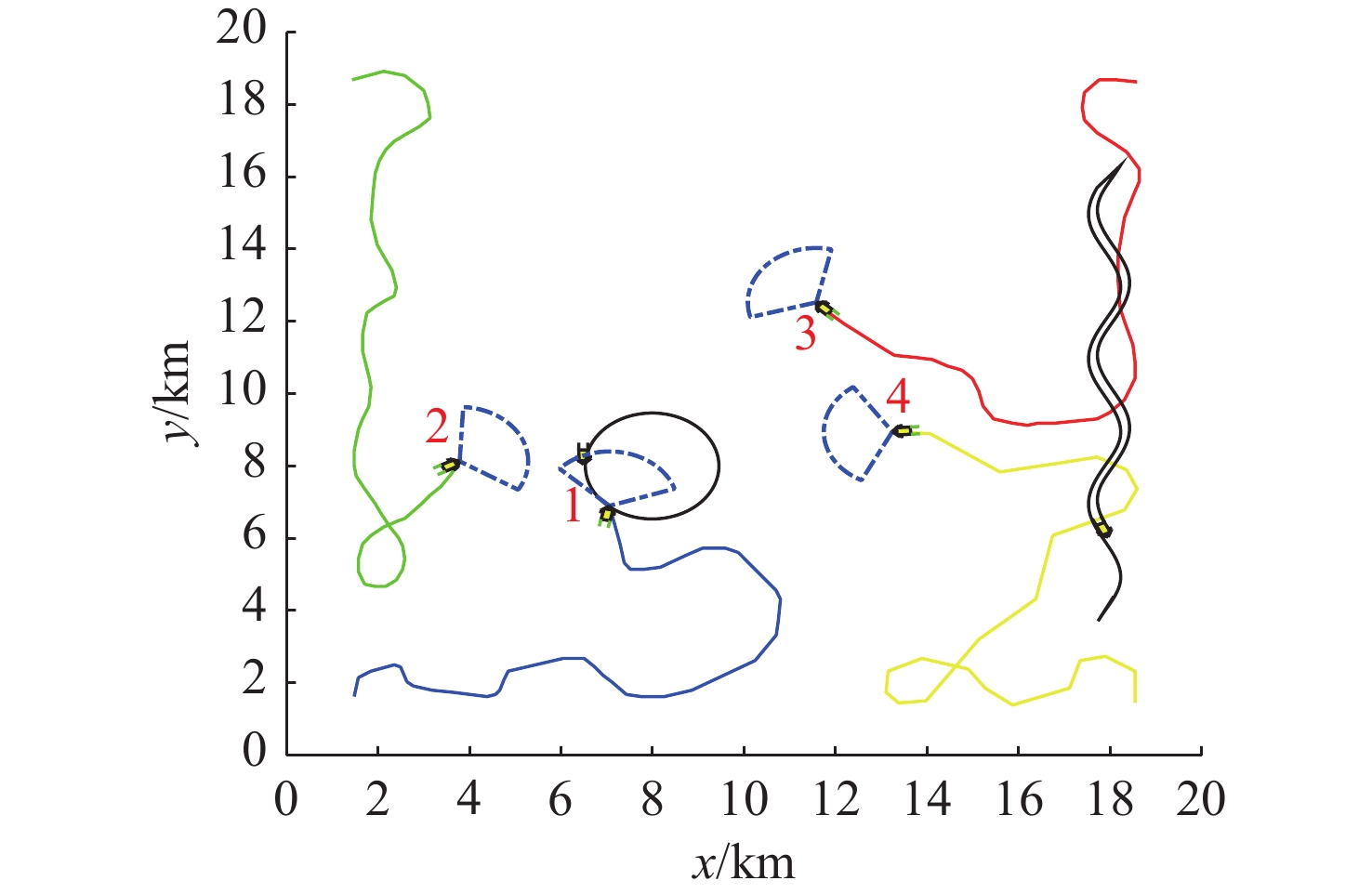
图 7 PSO-LPSR-SHADE-CLM搜索轨迹(第600步时)
Figure 7. Search trajectories of PSO-LPSR-SHADE-CLMat step 600
表 1 UUV初始状态及参数表
Table 1. Initial states and parameters of UUVs
$ {\rm{UUV}} $ 初始位置/km 航行速度/kn 最大转向角/(°) 避碰距离/m $ {{\rm{UUV}}_1} $ $ (0.5,0.5) $ 4 45 100 $ {{\rm{UUV}}_{\text{2}}} $ $ (0.5,19.5) $ $ {{\rm{UUV}}_{\text{3}}} $ $ (19.5,0.5) $ $ {{\rm{UUV}}_{\text{4}}} $ $ (19.5,19.5) $  下载: 导出CSV
下载: 导出CSV
表 3 PSO-LSHADE-CLM算法参数表
Table 3. Parameters of PSO-LSHADE-CLM algorithm
粒子数目 $ {G_{\max }} $ $ {c_1} $ $ {c_2} $ $ w1 $ $ w2 $ $ w3 $ 100 100 2 2 0.375 0.125 0.5
下载: 导出CSV
表 4 不同组合算法搜索到的目标数量
Table 4. Number of searched targets by different combination algorithms
移动目标数量 4 UUVs 6 UUVs IPM+PSO-LPSR-
SHADE-CLMIPM+PSO TPM+PSO-LPSR-
SHADE-CLMIPM+PSO-LPSR-
SHADE-CLMIPM+PSO IPM+PSO-LPSR-
SHADE-CLM2 1.85 1.4 1.2 1.87 1.6 1.4 4 3.60 3.3 3.1 3.80 3.6 3.3 6 5.40 4.9 4.7 5.70 5.2 4.9 合计 10.85 9.6 9 11.37 10.4 9.6
下载: 导出CSV
-
[1] Shem A G, Mazzuchi T A, Sarkani S. Addressing uncertainty in UAV navigation decision-making[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(1): 295-313. doi: 10.1109/TAES.2008.4517005 [2] Khan A, Yanmaz E, Rinner B. Information merging in multi-UAV cooperative search[C]//2014 IEEE International Conference on Robotic and Automation. Hong Kong, China: IEEE, 2014: 3122-3129. [3] 符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域搜索算法[J]. 系统工程与电子技术, 2016, 38(4): 821-827.Fu Xiaowei, Wei Guangwei, Gao Xiaoguang. Cooperative area search algorithm for multi-UAVs in uncertainty environment[J]. Systems Engineering and Electronics, 2016, 38(4): 821-827. [4] Lum C, Rysdyk R, Pongpunwattana A. Occupancy based map searching using heterogeneous teams of autonomous vehicles[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Keystone, Colorado: AIAA, 2006: 6196. [5] 吴文超, 黄长强, 宋磊. 不确定环境下的多无人机协同搜索航路规划[J]. 兵工学报, 2011, 32(11): 1337-1342.Wu Wenchao, Huang Changqiang, Song Lei. Cooperative search and path planning of multi-unmanned air vehicles in uncertain environment[J]. Acta Armamentarii, 2011, 32(11): 1337-1342. [6] Yan Z P, Hao Y S, Li J. Multi-UUV collaborative search planning based on predictive control and backtracking[C] //2019 Chinese Control Conference(CCC). Guangzhou, China: IEEE, 2019: 2266-2271. [7] 田菁, 陈岩, 沈林成. 不确定环境中多无人机协同搜索算法[J]. 电子与信息学报, 2007, 29(10): 2325-2328.Tian Jing, Chen Yan, Shen Lincheng. Cooperative search algorithm for multi-uavs in uncertainty environment[J]. Journal of Electronics & Information Technology, 2007, 29(10): 2325-2328. [8] 陈盼, 吴晓锋. UUV编队协同应召搜索马尔可夫运动目标的方法[J]. 系统工程与电子技术, 2012, 34(8): 1630-1634.Chen Pan, Wu Xiaofeng. Method of call-search for markovian motion targets using UUV cooperation[J]. Systems Engineering and Electronics, 2012, 34(8): 1630-1634. [9] Yang J, Wang X, Bauer P. Extended PSO based collaborative searching for robotic swarms with practical constraints[J]. IEEE Access, 2019(7): 76328-76341. [10] Purbolingga Y, Jazidie A, Effendi R. Modified ant colony algorithm for swarm multi agent exploration on target searching in unknown environment[C]//2019 International Conference of Artificial Intelligence and Information Technology. Yogyakarta, Indonesia: ICAIIT, 2019: 175-179. [11] Yan Z P, Jiang L Y, Wu D. A path planning algorithm based on artificial potential field method and ant colony algorithm[C]//2021 IEEE International Conference on Mechatronics and Automation(ICMA). Takamatsu, Japan: IEEE, 2021: 1454-1459. [12] Cai Y, Yang S X. An improved PSO-based approach with dynamic parameter tuning for cooperative multi-robot target searching in complex unknown environments[J]. International Journal of Control, 2013, 86(10): 1720-1732. doi: 10.1080/00207179.2013.794920 [13] Dadgar M, Jafari S, Hamzeh A. A PSO-based multi-robot cooperation method for target searching in unknown environments[J]. Neurocomputing, 2016, 177(12): 62-74. [14] Ye H T, Li Z Q. PID neural network decoupling control based on hybrid particle swarm optimization and differential evolution[J]. International Journal of Automation and Computing, 2020, 17(6): 867-872. doi: 10.1007/s11633-015-0917-7 [15] 王建青, 李帆, 赵建辉. 基于混合粒子群优化的巡航导弹低空突防航迹规划[J]. 应用科学学报, 2012, 30(3): 317-323.Wang Jianqing, Li Fan, Zhao Jianhui. Route planning in low altitude penetration for cruise missile based on a hybrid particle swarm optimization[J]. Journal of Applied Sciences, 2012, 30(3): 317-323. [16] 刘漳辉, 郑鸿强, 张建山, 等. 多无人机使能移动边缘计算系统中的计算卸载与部署优化[J]. 计算机科学, 2022, 49(6A): 619-627. doi: 10.11896/jsjkx.210600165Liu Zhanghui, Zheng Hongqiang, Zhang Jianshan, et al. Computation offloading and deployment optimization in multi-UAV-enabled mobile edge computing systems[J]. Computer Science, 2022, 49(6A): 619-627. doi: 10.11896/jsjkx.210600165 [17] Mao Z Y, Liu P L, Ding W J, et al. An improved genetic algorithm for optimal search path of unmanned underwater vehicles[C]//International Conference on Intelligent Robotics and Applications. Shenyang, China: Springer, Cham, 2019: 480-488. [18] Ding W J, Cao H, Guo H, et al. Investigation on optimal path for submarine search by an unmanned underwater vehicle[J]. Computers & Electrical Engineering, 2019, 79: 106468. [19] Yao P, Wang H L, Ji H X. Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2016(55): 131-143. [20] 刘大千, 包卫东, 费博雯, 等. 未知城市环境下的多机协同目标搜索方法研究[J]. 系统工程与电子技术, 2022(6): 1-15.Liu Daqian, Bao Weidong, Fei Bowen, et al. Research on cooperative search method for multiple UAVs under unknown environment[J]. Systems Engineering and Electronics, 2022(6): 1-15. [21] 刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J]. 系统工程与电子技术, 2017, 39(9): 1998-2011.Liu Zhong, Gao Xiaoguang, Fu Xiaowei. Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone[J]. Systems Engineering and Electronics, 2017, 39(9): 1998-2011. [22] 张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41(5): 220-232.Zhang Zhexuan, Long Teng, Xu Guangtong, et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving targets[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 220-232. [23] Zhao F Q, Zhao L X, Wang L, et al. A collaborative lshade algorithm with comprehensive learning mechanism[J]. Applied Soft Computing, 2020, 96: 106609. doi: 10.1016/j.asoc.2020.106609 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 65
- HTML全文浏览量: 6
- PDF下载量: 31
- 被引次数: 0




