

Research on Abnormal Ultra-shallow Shutdown of Undersea Vehicles
-
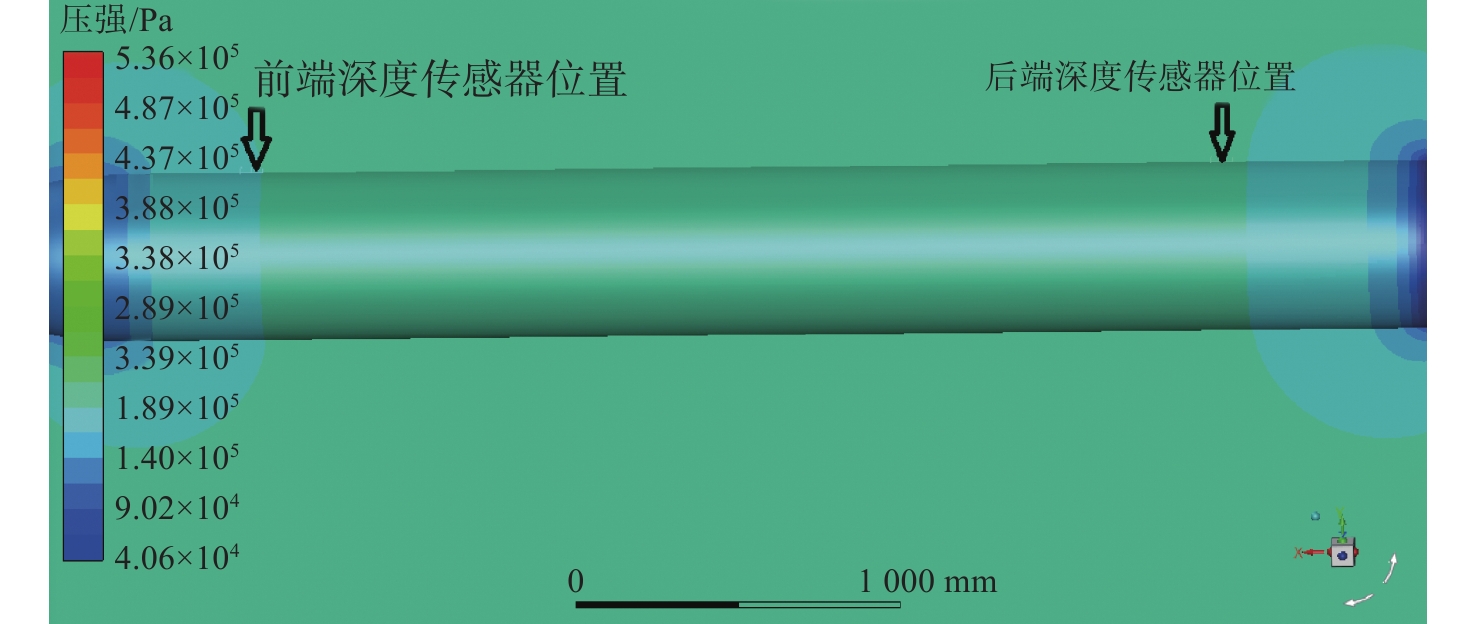
摘要: 针对水下航行器在设定深度下航行时, 有时会出现航行深度未达超浅深度而出现非正常超浅停车的问题, 对可能导致水下航行器非正常停车的各种因素进行了分析。采用数值仿真分析了不同航速下流体压力对水下航行器不同位置的影响, 并结合海上试验数据分析了水下航行器非正常停车故障发生时的水动力误差分布规律。数值仿真和海上试验分析表明, 水下航行器航行深度临近最小航行深度时, 航行器前、后端深度传感器所受流体压力存在差异, 且随航速不同而不同, 当航行超过一定航速引起流体压力误差过大, 导致后部的深度传感器所处深度为正常设定深度而前部的深度传感器已处于超浅状态, 此时便会发生非正常停车故障。Abstract: Concerning the problem of abnormal ultra-shallow shutdown protection, undersea vehicles navigate at a set depth even if they are not navigating at ultra-shallow protection depths. Various factors that may lead to the abnormal shutdown of undersea vehicles are analyzed. The numerical simulation method is used to analyze the effect of fluid pressure on different positions of the underwater vehicle at different speeds. The distribution law of hydrodynamic errors, which are observed when an abnormal shutdown of undersea vehicles occurs, is obtained based on sea trial data. The numerical simulation and the trials indicate that, when the vehicle navigates near the minimum depth, there will be a fluid pressure difference between the front and back depth transducers on the vehicle, which varies with the speed of the vehicle. When the speed of the vehicle exceeds a certain value, the fluid pressure error will be so large that the back depth transducer will indicate a normal depth while the front transducer will indicate an ultra-shallow state, thus resulting in an abnormal shutdown.
-
Key words:
- undersea vehicle /
- depth control /
- ultra-shallow shutdown
-
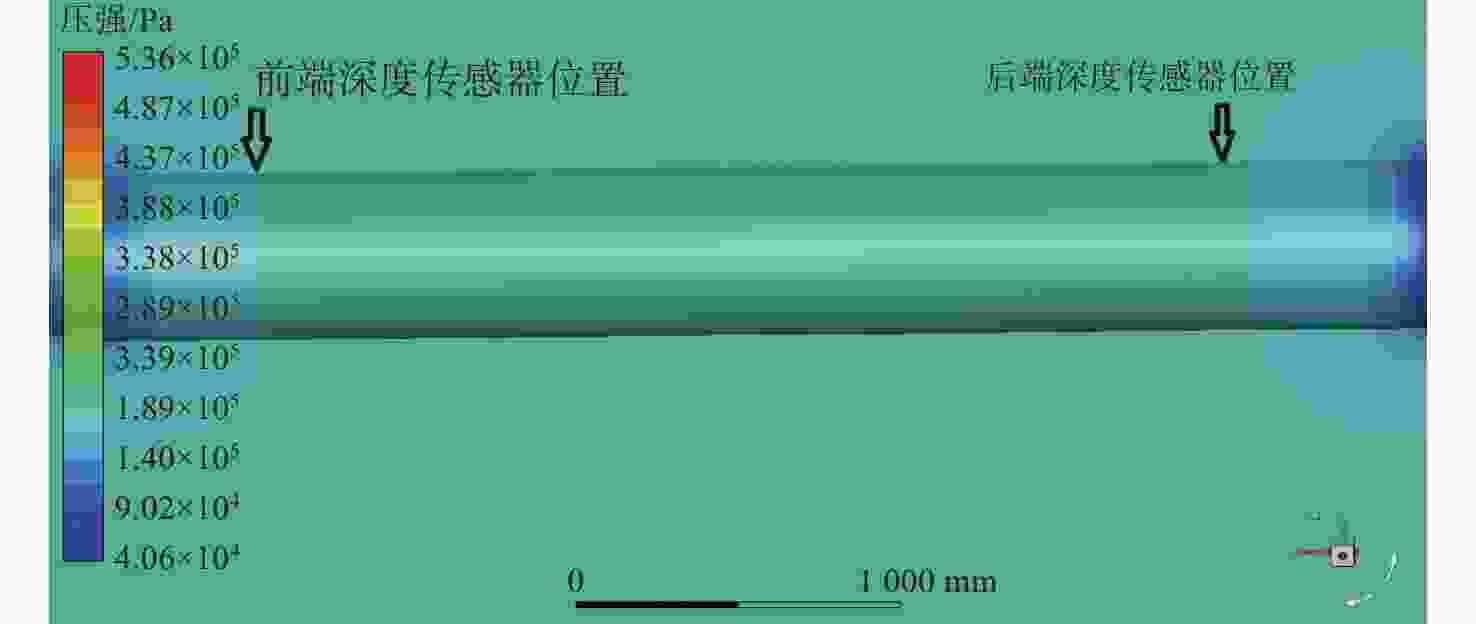
图 2 航行状态下水下航行器压强图
Figure 2. Pressure distribution around an undersea vehicle in navigation
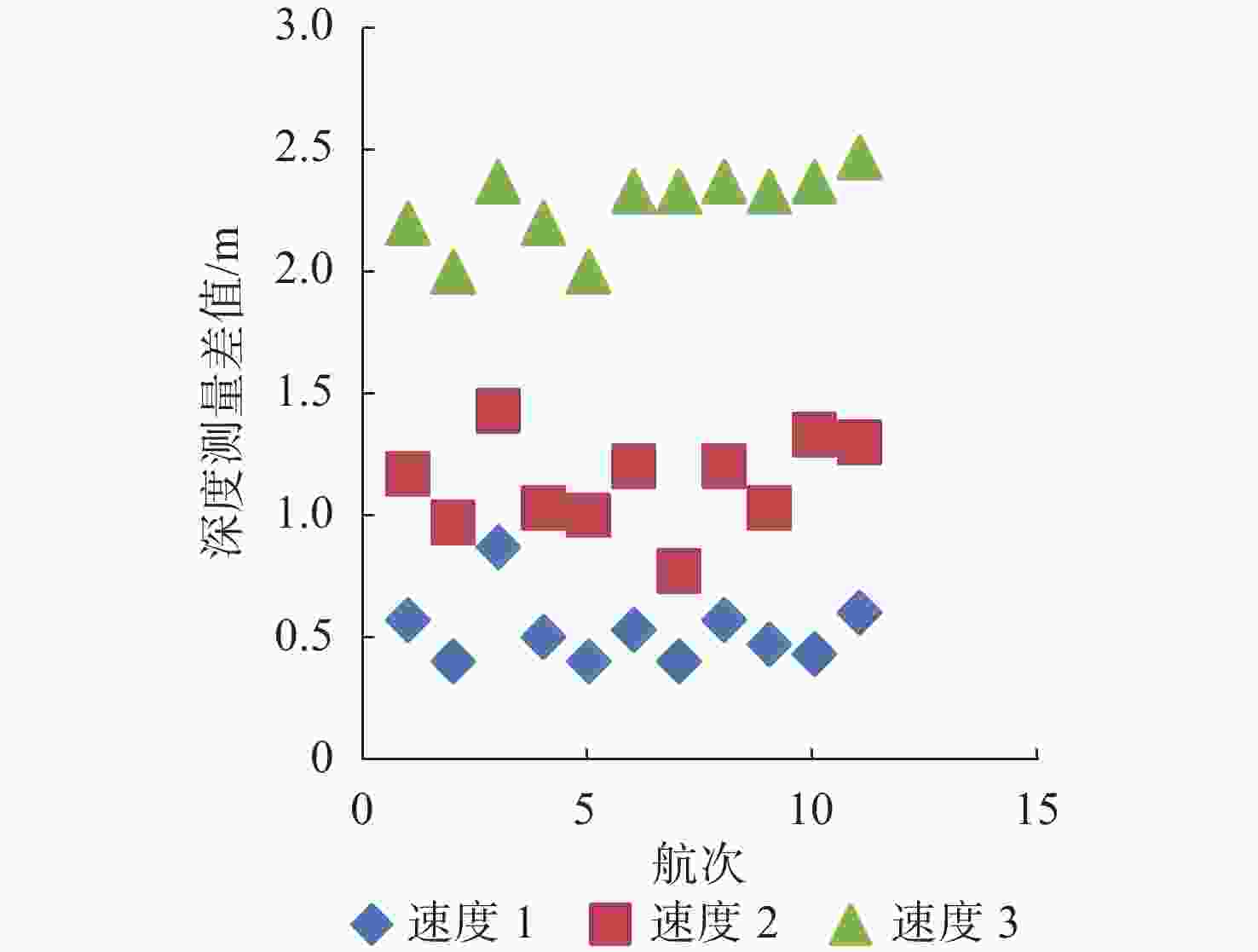
图 3 各航速下深度测量差值散点图
Figure 3. Scatter diagram of depth measurement errors at various traveling speeds
表 1 不同攻角下深度测量差值
Table 1. Measurement errors of depth at various angles of attack
攻角
/(°)前深度传感器
测量深度/m后深度传感器
测量深度/m差值/m 0 8.855 2 9.205 1 0.35 −1 8.824 9 9.225 4 0.40 −2 8.814 7 9.260 1 0.45 −3 8.933 8 9.240 7 0.31 −4 8.863 6 9.288 8 0.43  下载: 导出CSV
下载: 导出CSV
表 2 不同航深下深度测量差值
Table 2. Measurement errors of depth at various depth
航深/m 前深度传感器
测量深度/m后深度传感器
测量深度/m差值/m 10 8.989 2 9.231 7 0.24 25 23.759 2 24.008 7 0.25 50 48.759 2 49.008 7 0.25 75 73.759 2 74.008 7 0.25 100 98.759 2 99.008 7 0.25
下载: 导出CSV
表 3 不同航速下深度测量差值
Table 3. Measurement errors of depth at various speeds
航速 深度
设定值/m前深度传感器
测量深度/m后深度传感器
测量深度/m差值
/m平均
差值
/m速度1 20 19.3 19.8 0.5 0.5 20 19.3 19.8 0.5 20 19.3 19.8 0.5 速度2 9 7.7 9.0 1.3 1.2 9 7.7 8.8 1.1 9 7.7 8.9 1.2 速度3 9 6.6 9.1 2.5 2.3 9 6.6 8.7 2.1 9 6.6 8.9 2.3
下载: 导出CSV
表 4 水下航行器深度测量差值试验数据分析
Table 4. Analysis of measurement errors of test data for undersea vehicle depth
航次 深度测量差值的平均值/m 速度1 速度2 速度3 1 0.57 1.17 2.20 2 0.40 0.97 2.00 3 0.87 1.43 2.37 4 0.50 1.03 2.20 5 0.40 1.00 2.00 6 0.53 1.20 2.33 7 0.40 0.77 2.33 8 0.57 1.20 2.37 9 0.47 1.03 2.33 10 0.43 1.33 2.37 11 0.60 1.30 2.47
下载: 导出CSV
表 5 不同航速下深度测量差值统计学计算
Table 5. Statistical computation of measurement errors of depth at various speeds
参数 速度1 速度2 速度3 深度测量差值的平均值/m 0.52 1.13 2.27 深度测量差值的标准偏差 0.13 0.18 0.15 置信区间 (0.44, 0.60) (1.02, 1.24) (2.18, 2.36)
下载: 导出CSV
-
[1] Dhanak M R, Xiros N I. Springer Handbook of Ocean Engineering[M]. New York: Springer International Publishing, 2016. [2] 钟宏伟. 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(3): 215-225.Zhong Hong-wei. Review and Prospect of Equipment and Techniques for Unmanned Undersea Vehicle in Foreign Countries[J]. 2017, 25(3): 215-225. [3] 张安通, 徐令令, 王健, 等. 一种UUV智能应急安全控制自救系统设计[J]. 水下无人系统学报, 2019, 27(5): 548-554.Zhang An-tong, Xu Ling-ling, Wang Jian, et al. Design of an Intelligent Emergency Safety Control Self-rescue System for UUV[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 548-554. [4] 孙梦瑶, 刘玉红, 黄明龙, 等. 测量型深水AUV垂直面运动稳定性设计[J]. 机械科学与技术, 2016, 35(9): 1402-1407. doi: 10.13433/j.cnki.1003-8728.2016.0917Sun Meng-yao, Liu Yu-hong, Huang Ming-long, et al. Design of Dynamic Stability in Vertical Plane of Autonomous Underwater Vehicle with Measurement Missions[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(9): 1402-1407. doi: 10.13433/j.cnki.1003-8728.2016.0917 [5] 高婷, 庞永杰, 王亚兴, 等. 水下航行器水动力系数计算方法[J]. 哈尔滨工程大学学报, 2019, 40(1): 174-180. doi: 10.11990/jheu.201709100Gao Ting, Pang Yong-jie, Wang Ya-xing, et al. Calculation Method of Hydrodynamic Coefficients for Underwater Vehi- cles[J]. Journal of Harbin Engineering University, 2019, 40(1): 174-180. doi: 10.11990/jheu.201709100 [6] 袁常乐, 万德成. 不同雷诺数下圆柱流噪声分析[J]. 中国造船, 2020, 61(z2): 75-82. doi: 10.3969/j.issn.1000-4882.2020.z2.008Yuan Chang-le, Wan De-cheng. Analysis of Underwater Radiation Noise of Cylinder at Different Reynolds Num- bers[J]. Shipbuilding of China, 2020, 61(z2): 75-82. doi: 10.3969/j.issn.1000-4882.2020.z2.008 [7] 严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005. [8] 黄景泉, 张宇文. 航行器流体力学[M]. 西安: 西北工业大学出版社, 1989. [9] 王在铎, 王威, 张孝石. 表面特性对水下航行器流体动力的影响研究[J]. 鱼雷技术, 2015, 23(5): 321-325.Wang Zai-duo, Wang Wei, Zhang Xiao-shi. Influences of Surface Characteristcs of Underwater Vehicle on its Hydro- dynamic Properties[J]. Torpedo Technology, 2015, 23(5): 321-325. [10] 章乐多. 水下航行器基础运动控制仿真研究[J]. 舰船电子工程, 2021, 41(3): 157-161. doi: 10.3969/j.issn.1672-9730.2021.03.038Zhang Le-duo. Research of Simulation of UUV Basic Motion Control[J]. Ship Electronic Engineering, 2021, 41(3): 157-161. doi: 10.3969/j.issn.1672-9730.2021.03.038 [11] 吴乃龙, 吴超, 葛彤, 等. 基于鱼类体线感知机理的水下机器人水流场识别研究[J]. 机械工程学报, 2016, 52(13): 54-59. doi: 10.3901/JME.2016.13.054Wu Nai-long, Wu Chao, Ge Tong, et al. Flow Recognition of Underwater Vehicle Based on the Perception Mechanism of Lateral Line[J]. Journal of Mechanical Engineering, 2016, 52(13): 54-59. doi: 10.3901/JME.2016.13.054 [12] 曹晓明, 魏勇, 衡辉, 等. 海流扰动下无人水下航行器的动态面反演轨迹跟踪控制[J]. 系统工程与电子技术, 2021, 43(6): 1664-1672.Cao Xiao-ming, Wei Yong, Heng Hui, et al. Dynamic Surface Backstepping Trajectory Control of Unmanned Underwater Vellicles with Ocean Current Disturbances[J]. Systems Engineering and Electronics, 2021, 43(6): 1664-1672. -


 点击查看大图
点击查看大图

计量
- 文章访问数: 77
- HTML全文浏览量: 19
- PDF下载量: 17
- 被引次数: 0




