

Motion Simulation of Spatial Sampling of Mesoscale Processes for Underwater Gliders
-
摘要: 海洋中尺度过程包括涡旋、锋面和内波等现象, 是海洋中一类重要的动力过程, 在全球气候变化、海洋能量热量和物质输送过程中起着重要作用。对此类过程的观测与研究, 在海洋资源勘测、海洋生物探索以及军事等领域也有着较为重要的现实意义。水下滑翔机已成为近年来观测中尺度过程的重要工具之一。文中以海燕-Ⅱ自主式无人水下滑翔机作为研究对象, 首先, 根据动量和角动量定理建立了其六自由度动力学模型; 然后, 利用Simulink仿真对该模型进行了验证, 由仿真结果可知, 所提出的动力学模型能够较好地实现运动仿真; 最后, 针对几种中尺度过程不同的探测要求, 设计了水下滑翔机的运动方案, 并进行了空间采样运动的仿真, 仿真结果可为日后实际观测应用提供参考和优化参数。Abstract: Marine mesoscale processes, including vortices, fronts, and internal waves, are a class of important dynamic processes in the ocean that have a significant influence on global climate change and the transport of marine energy, heat, and materials. The observation and investigation of such processes also have important practical significance in the field of marine resources, organism exploration, and military domains. Underwater gliders have recently become important devices for observing mesoscale processes. “Petrel-Ⅱ,” a type of autonomous underwater glider, is considered the main focus of this study. First, a dynamics model is established based on the momentum and angular momentum theorems. Simulink is then used to confirm the feasibility of the proposed model. According to the simulation results, the proposed dynamic model can realize motion simulation well. Finally, based on the different requirements for the detection of several mesoscale processes, different sampling motion schemes are presented, and a motion simulation of spatial sampling is provided. This study could provide a reference and optimization parameters for future practical observations and applications.
-
Key words:
- underwater glider /
- mesoscale process /
- Petrel-Ⅱ /
- spatial sampling /
- motion simulation
-
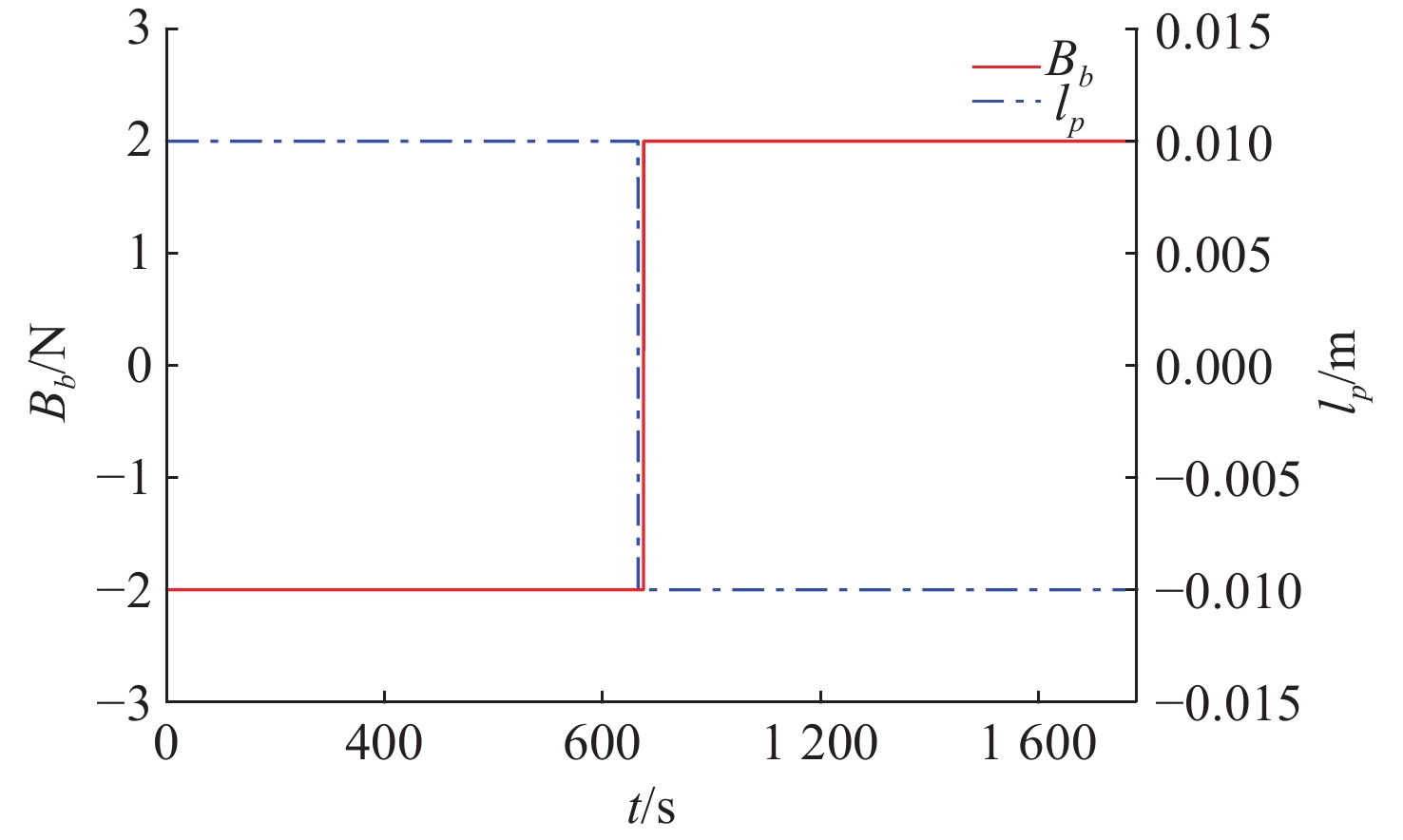
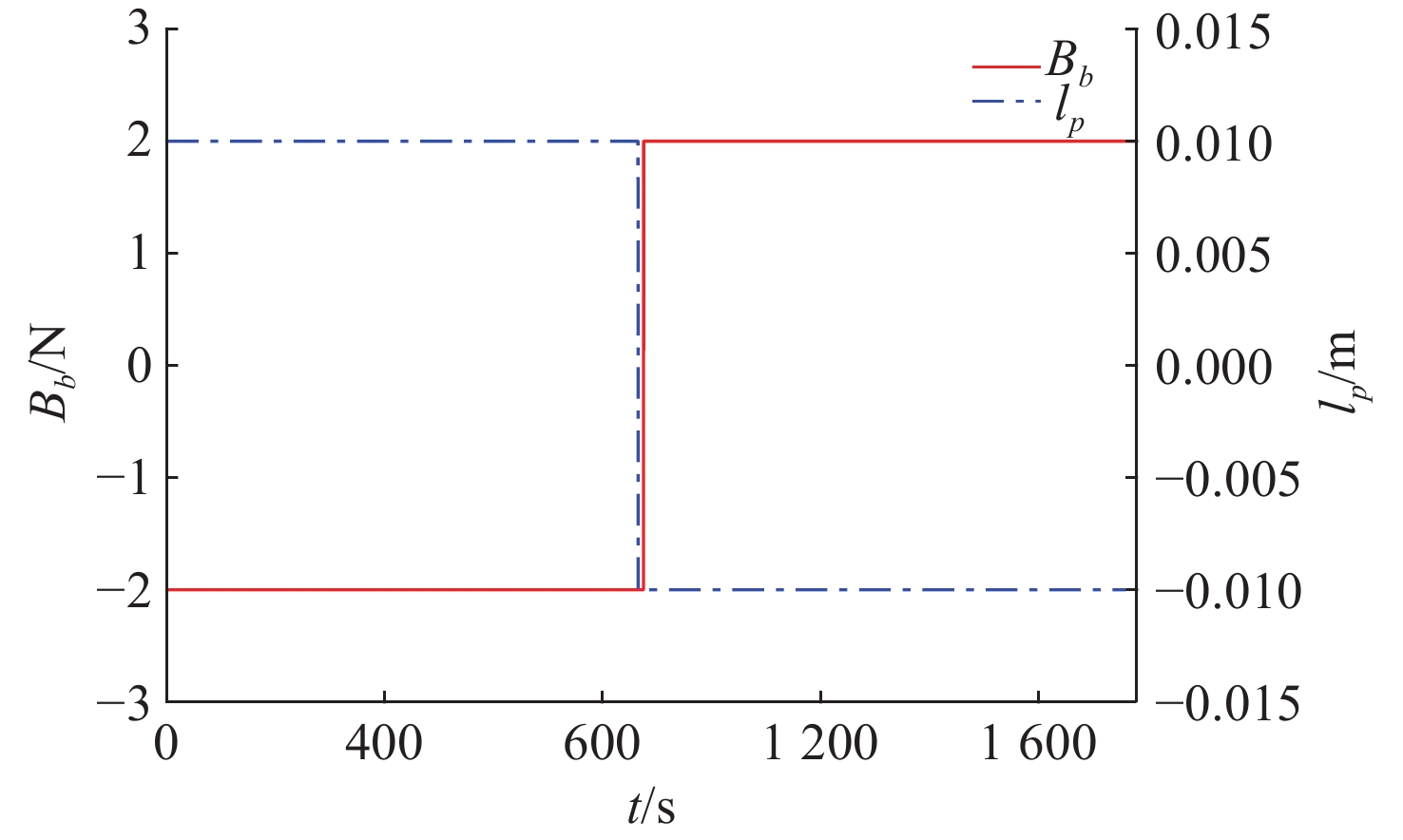
图 4 锯齿状运动下驱动浮力和俯仰调节单元位移随时间变化曲线
Figure 4. Time-history curves of driving buoyancy and displacement of pitch regulating unit under the saw-tooth motion
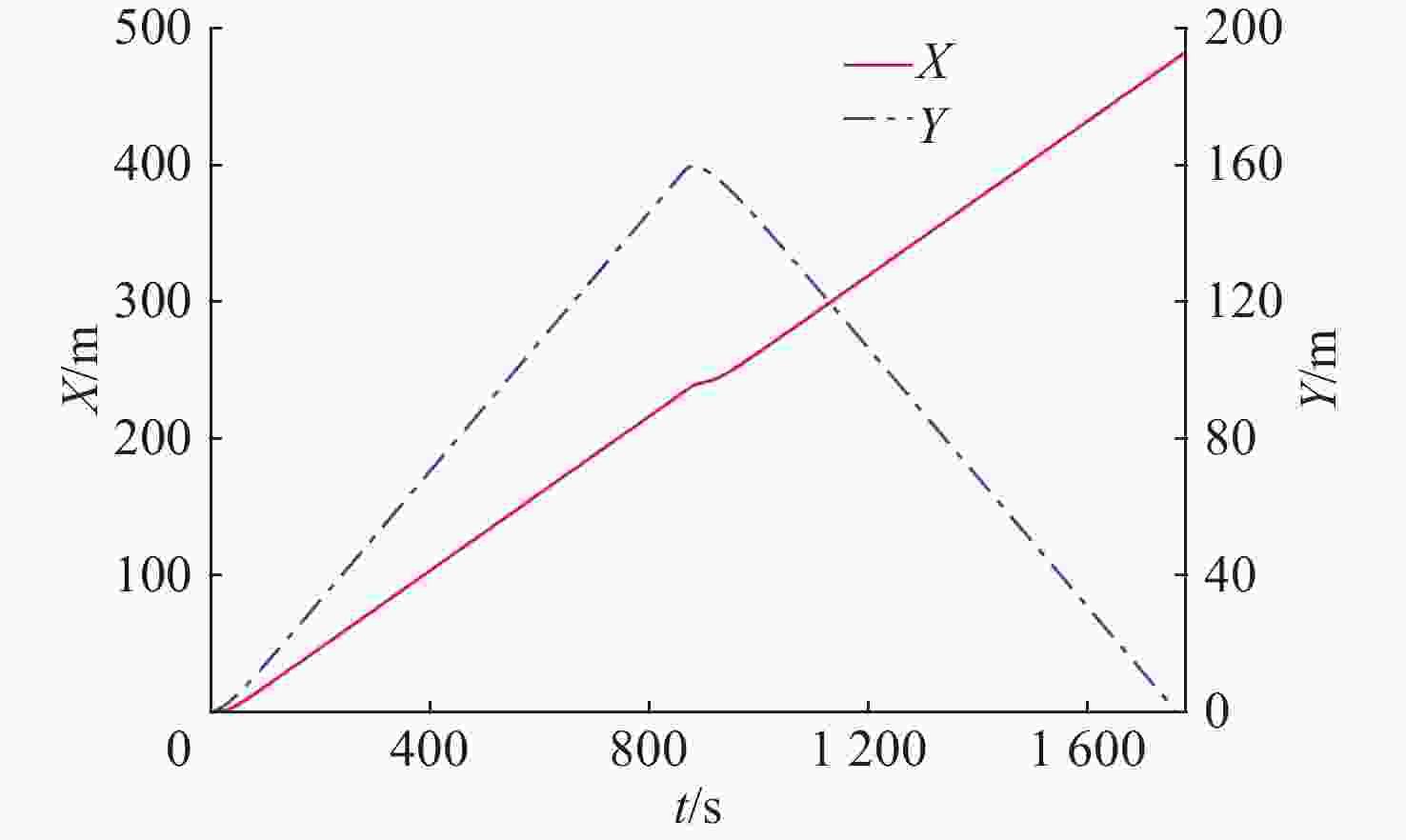
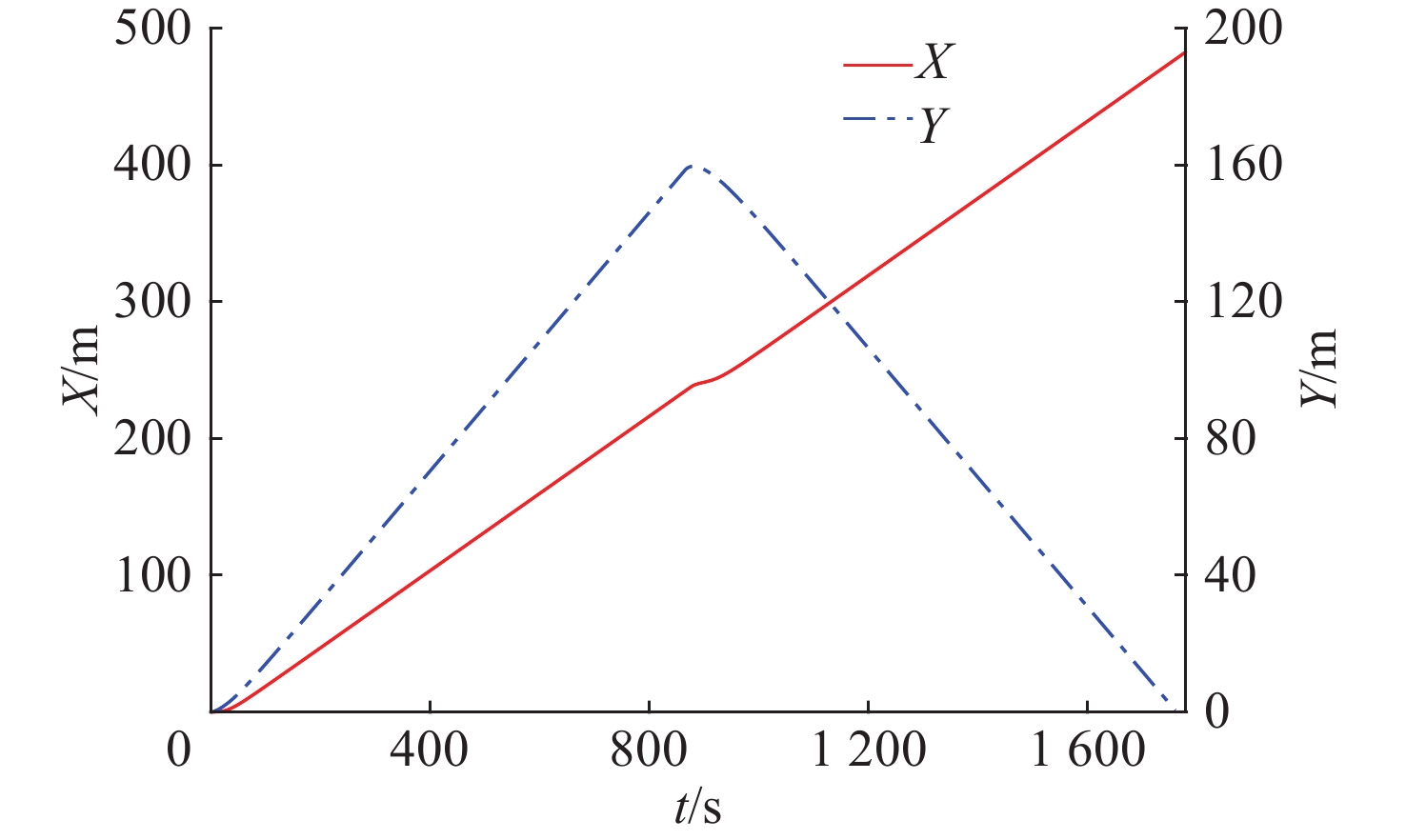
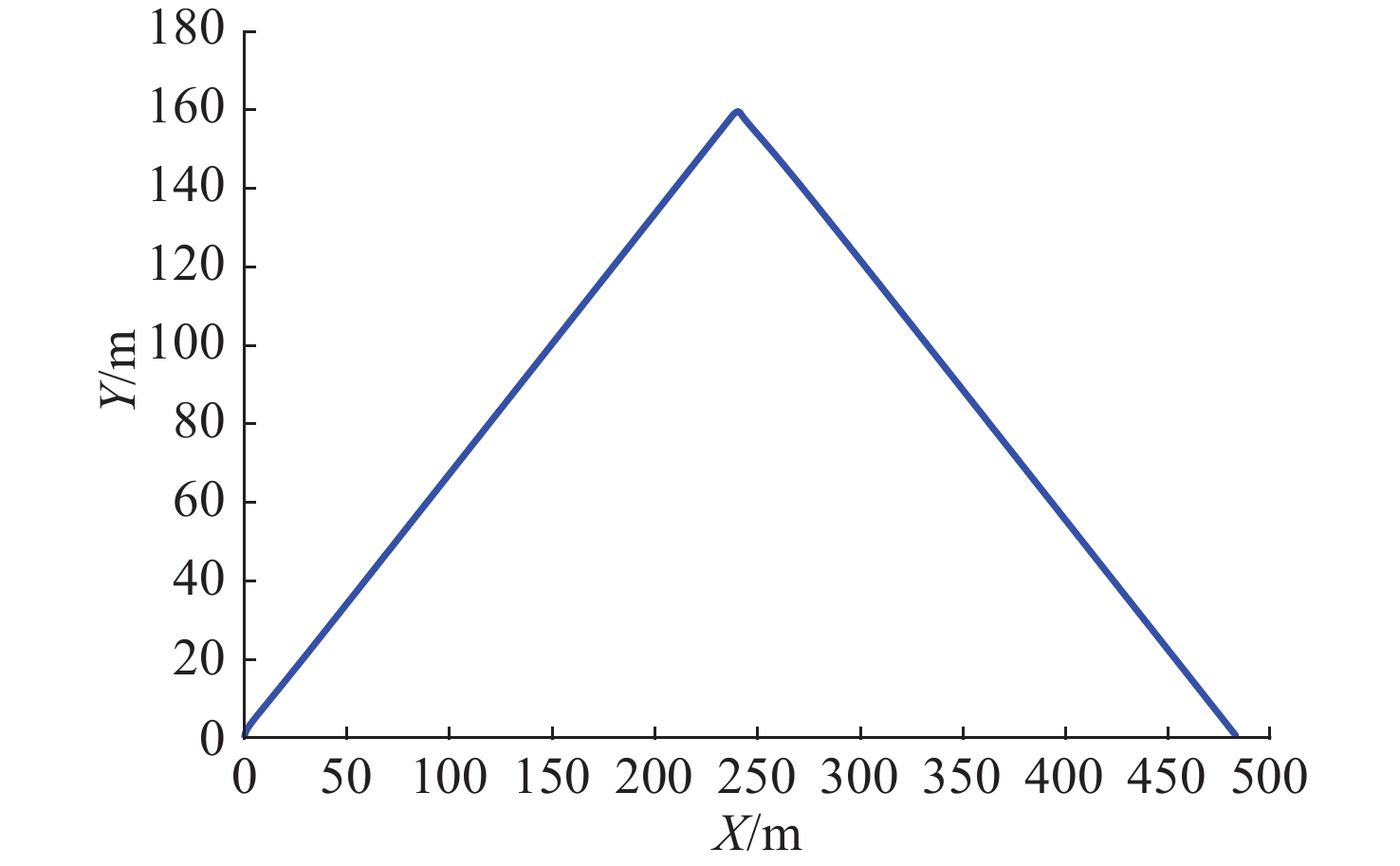
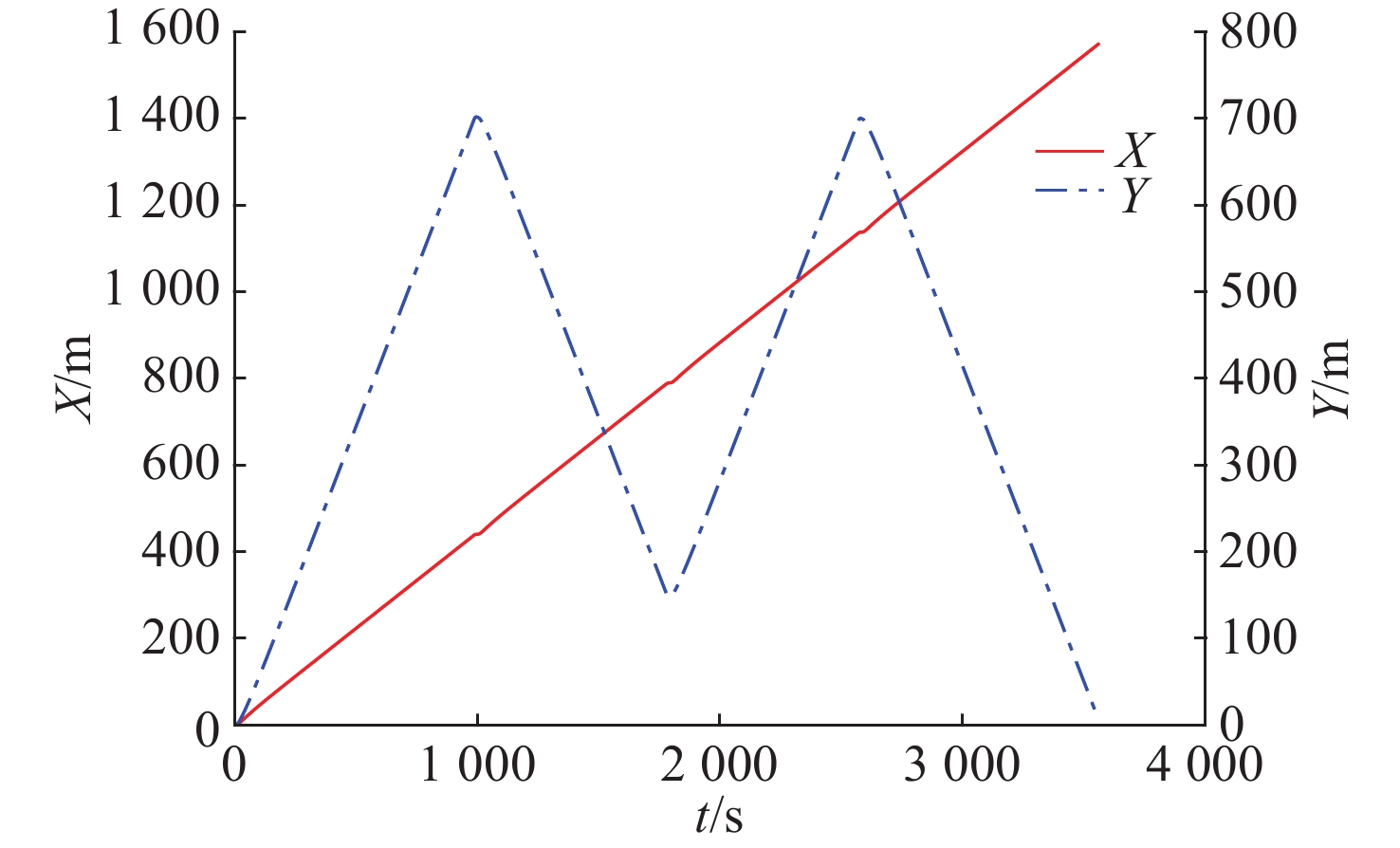
图 5 锯齿状运动下水平位移和垂直深度随时间变化曲线
Figure 5. Time-history curves of horizontal displacement and vertical depth under the saw-tooth motion

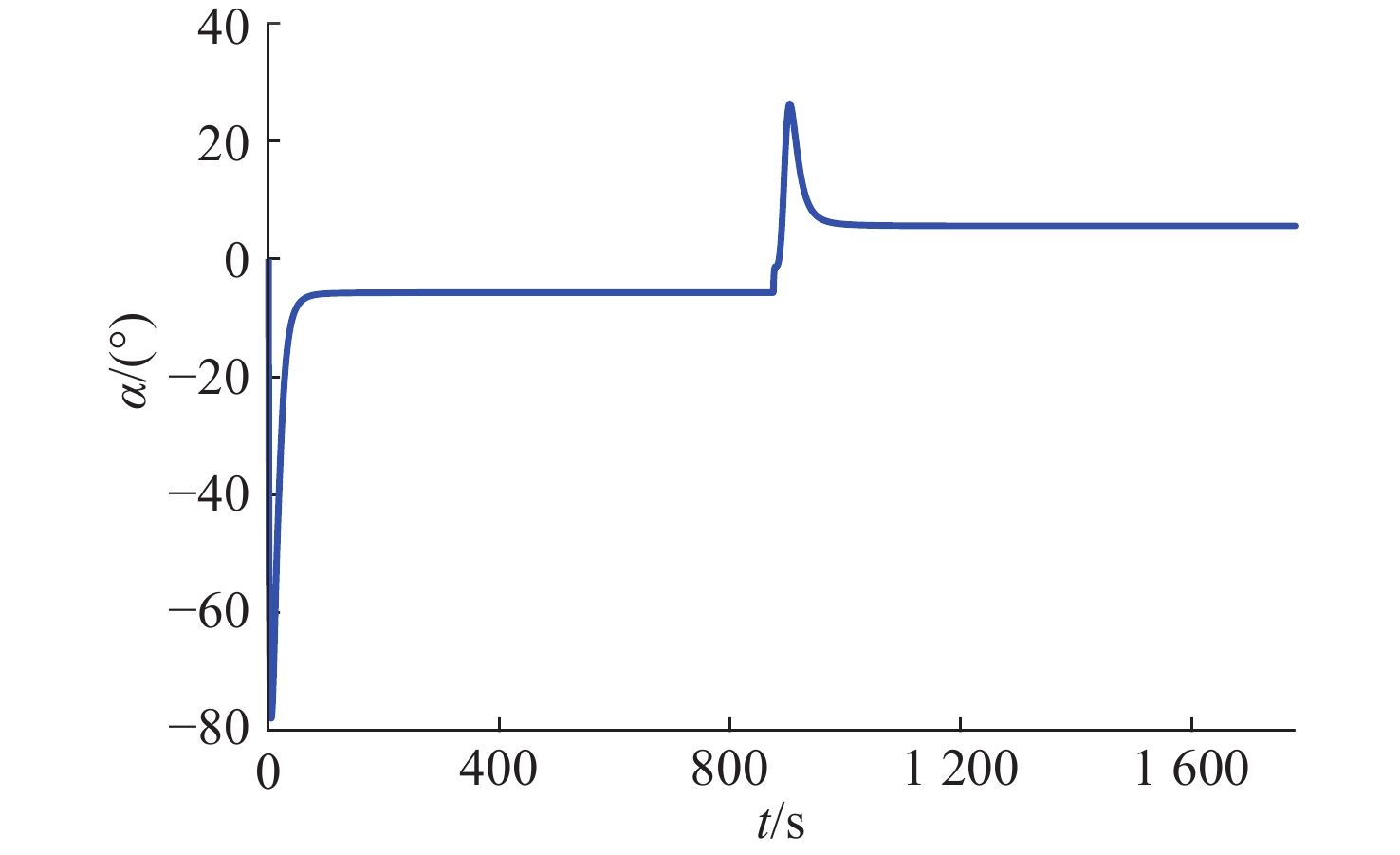
图 7 锯齿状运动下攻角随时间变化曲线
Figure 7. Time-history curve of attack angle under the saw-tooth motion

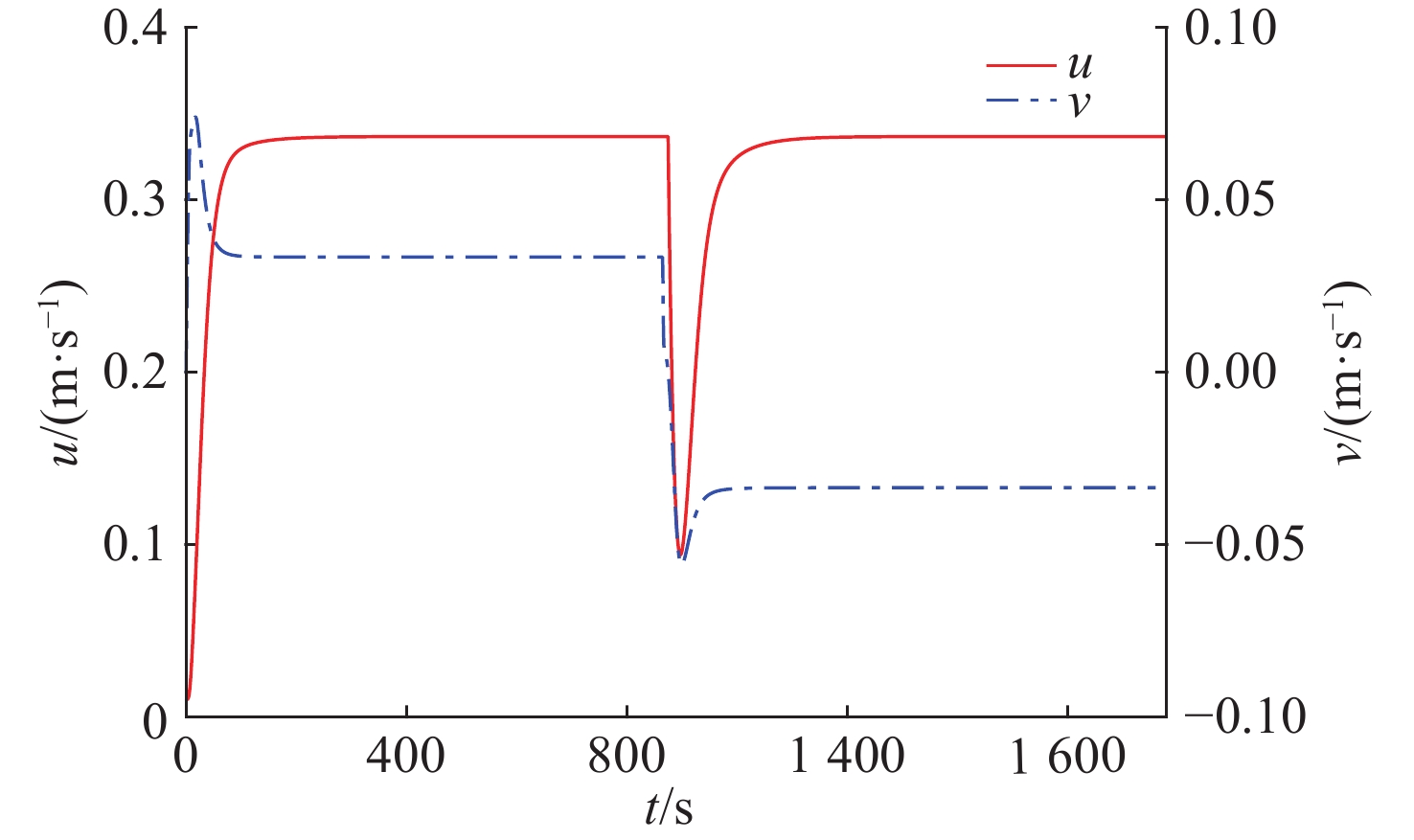
图 8 锯齿状运动下速度分量随时间变化曲线
Figure 8. Time-history curves of velocity component under the saw-tooth motion
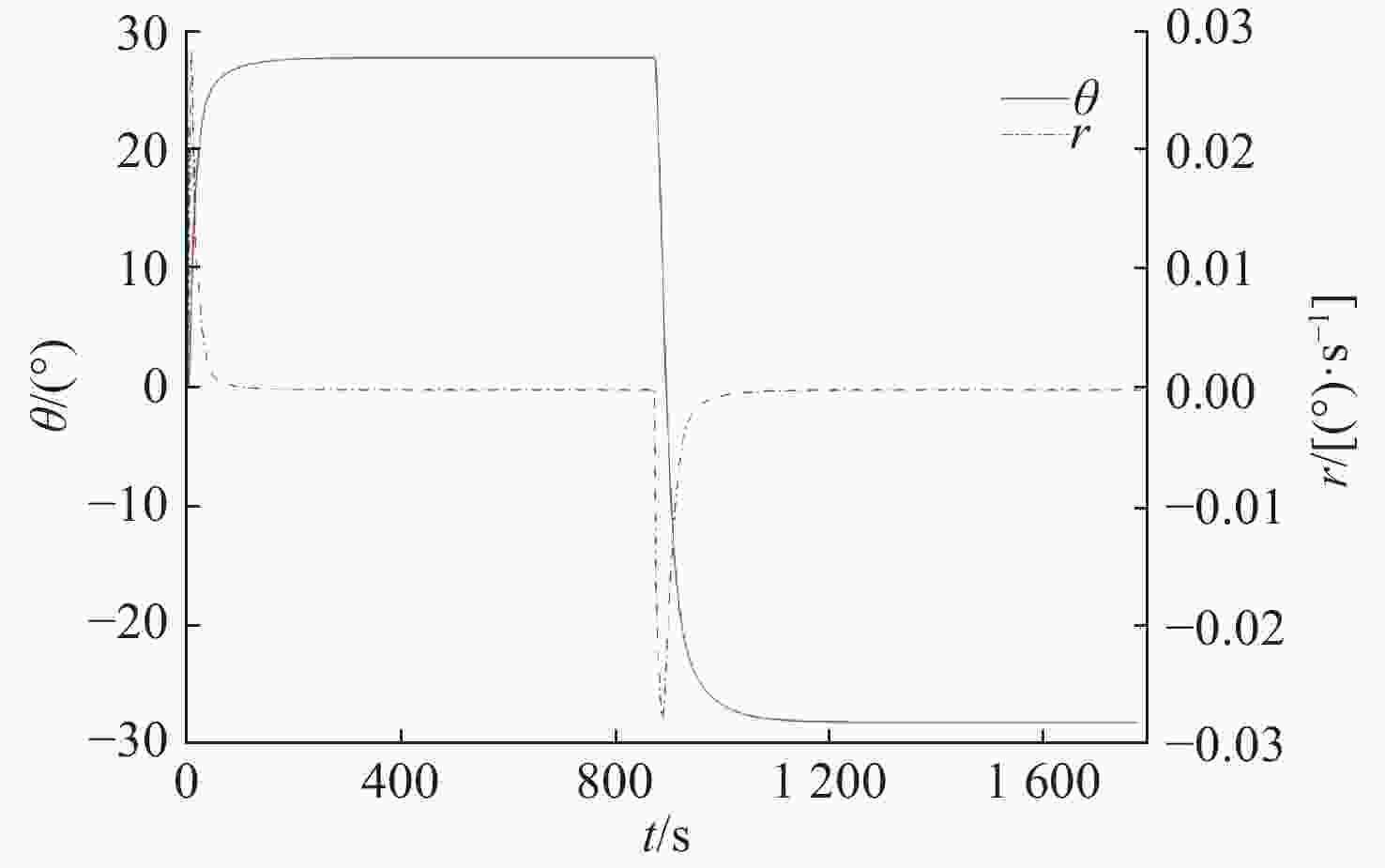
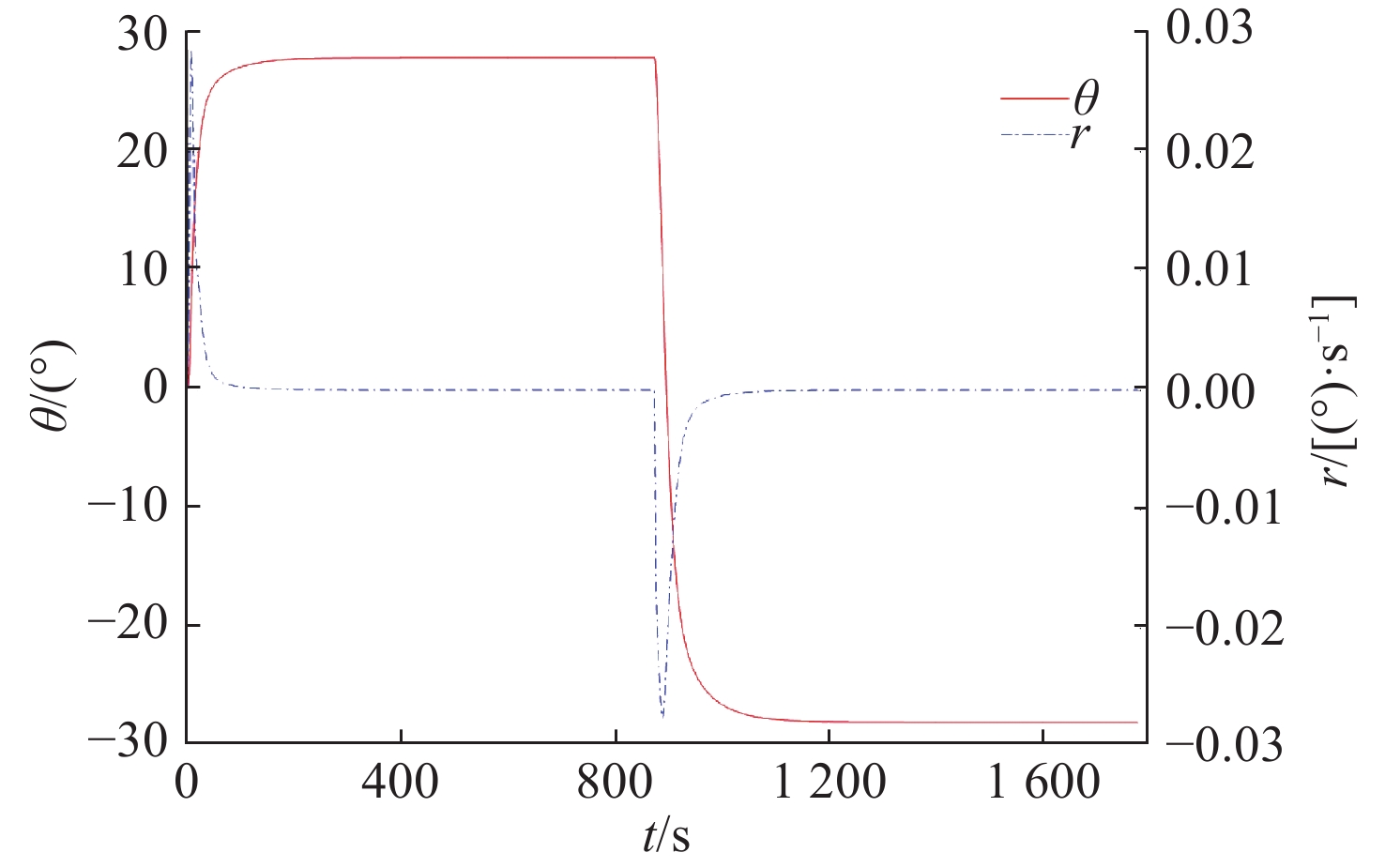
图 9 锯齿状运动下俯仰角和角速度随时间变化曲线
Figure 9. Time-history curves of pitch angle and pitch angular velocity under the saw-tooth motion

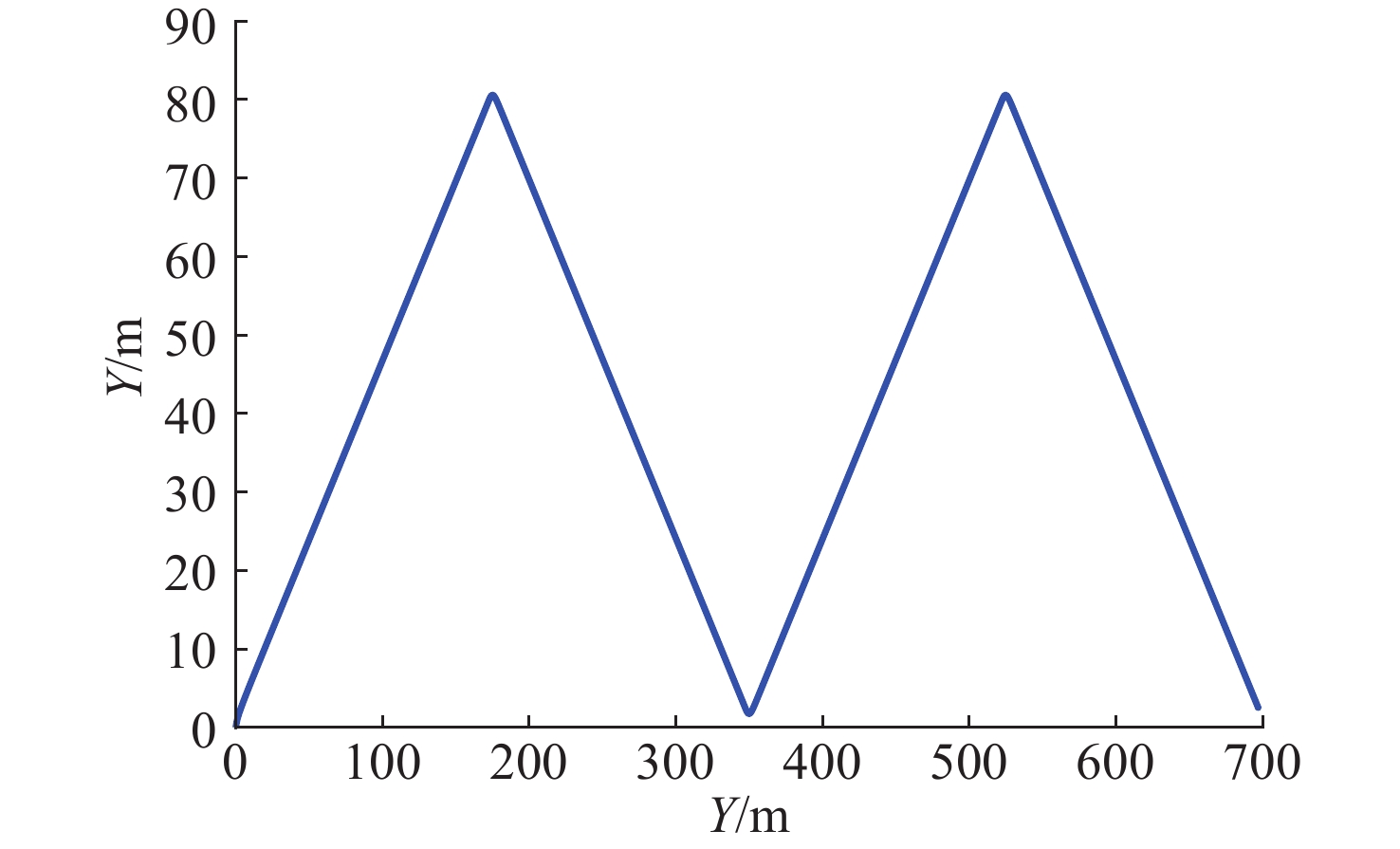
图 11 温度锋探测纵垂面运动轨迹仿真曲线
Figure 11. Trajectory simulation curve of detected thermal front on vertical plane

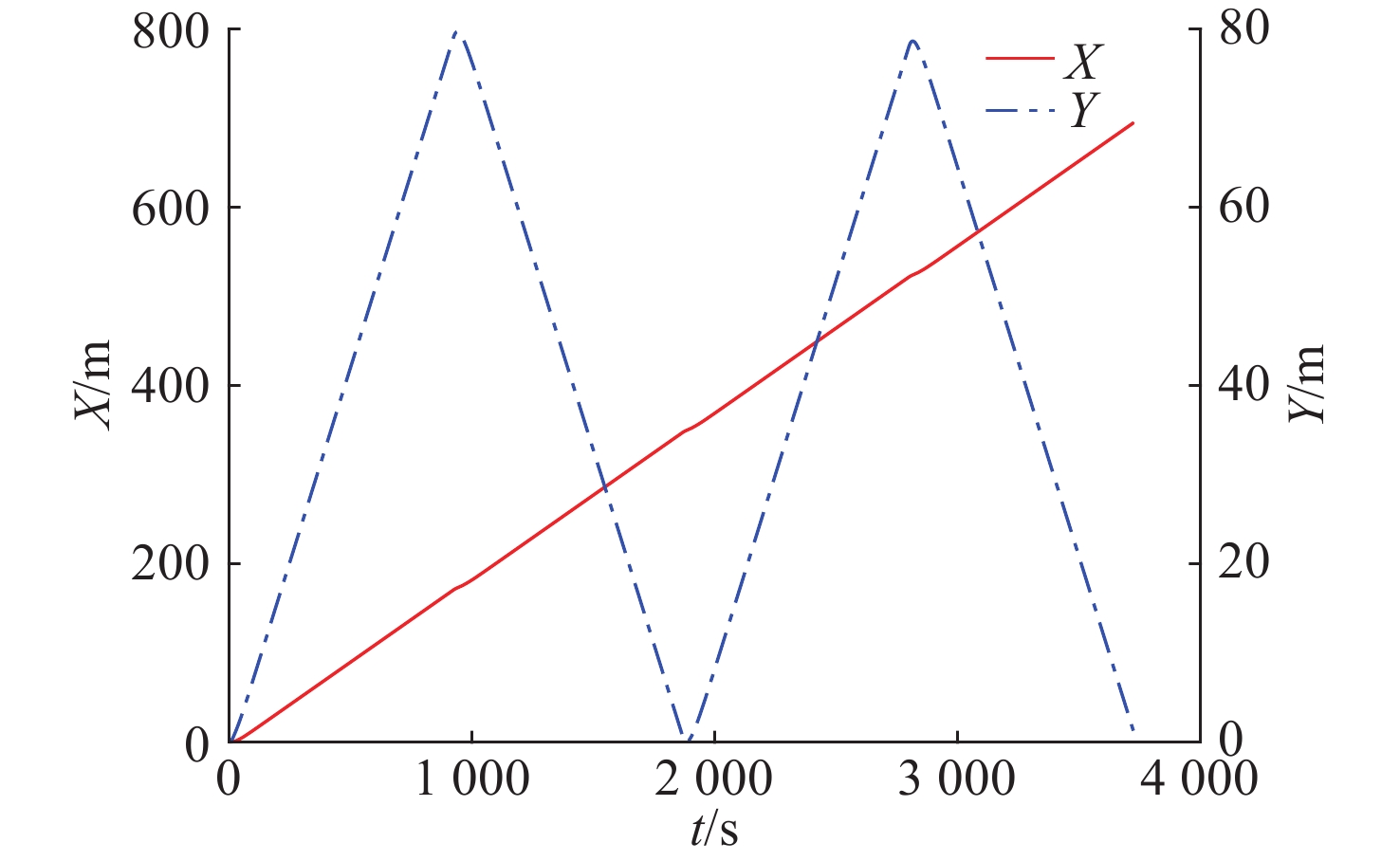
图 12 温度锋探测水平位移和垂直深度随时间变化曲线
Figure 12. Time-history curves of horizontal displacement and vertical depth of detected thermal front during simulation
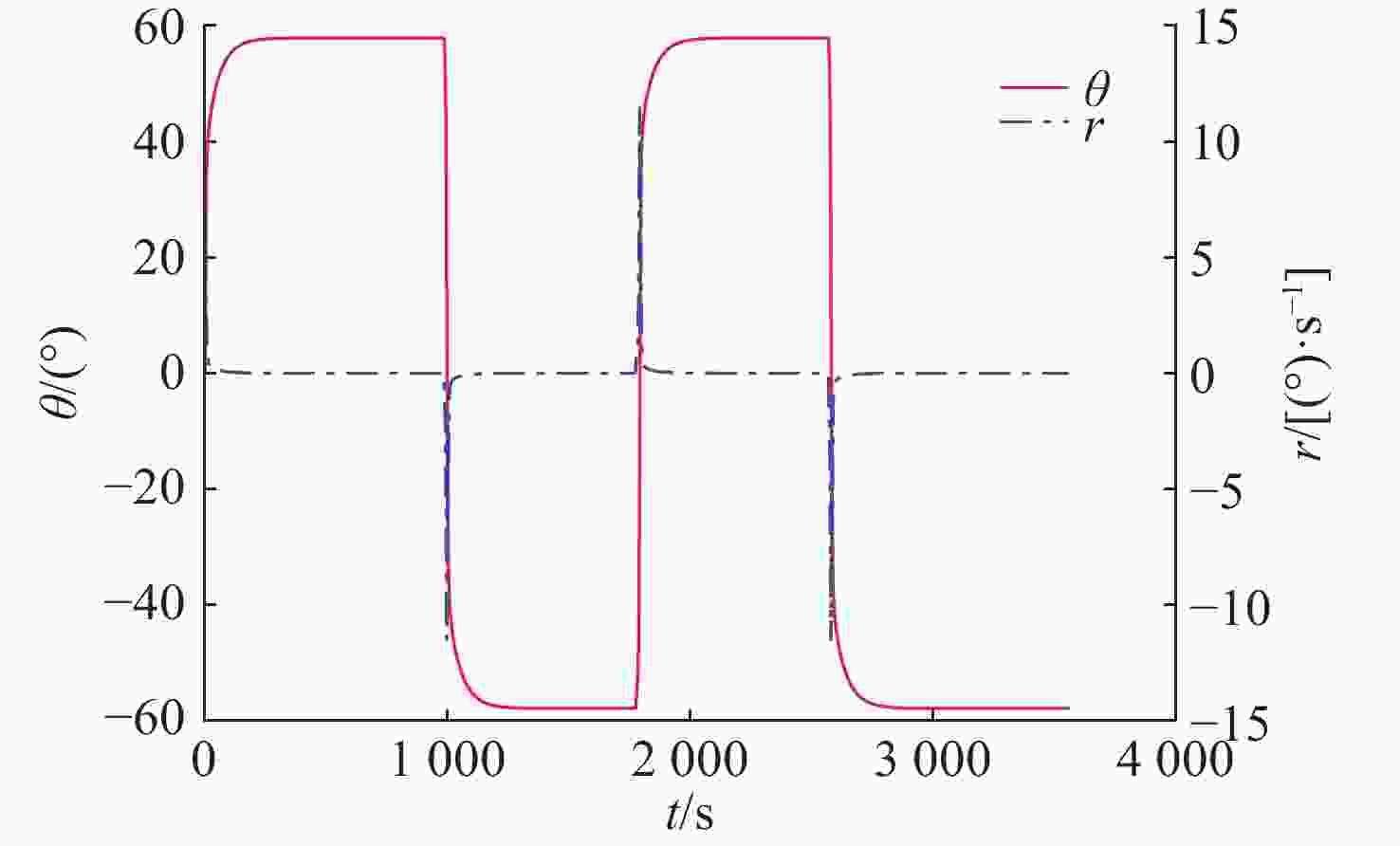
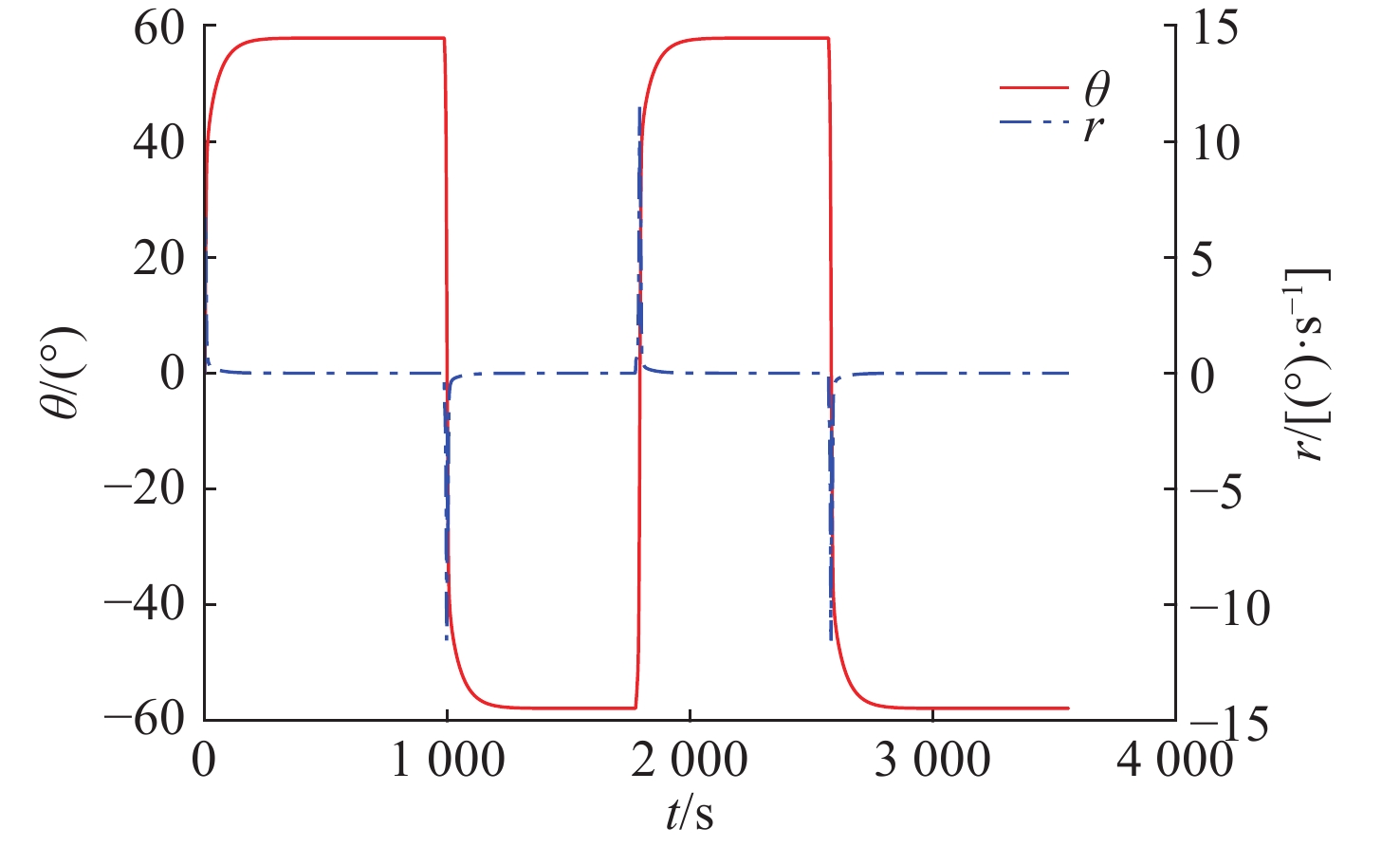
图 13 温度锋探测俯仰角和角速度随时间变化曲线
Figure 13. Time-history curves of pitch angle and pitch angular velocity of detected thermal front during simulation
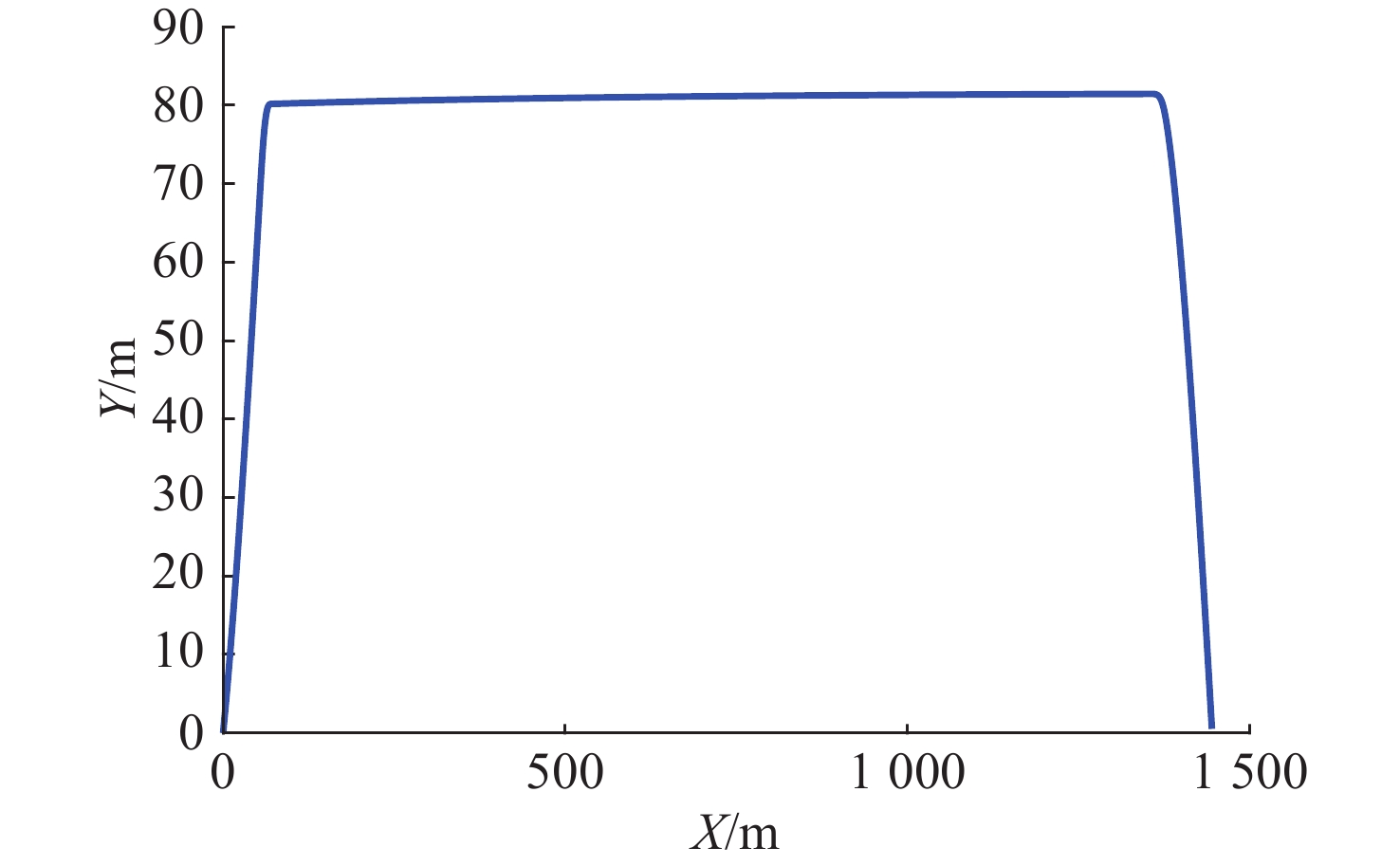
图 14 定深运动下次中尺度反气旋涡旋探测的纵垂面运动轨迹
Figure 14. Trajectory on vertical plane of detected sub mesoscale anticyclone vortex under the depthkeeping motion

图 15 定深运动下次中尺度反气旋涡旋探测的水平位移和垂直深度随时间变化曲线
Figure 15. Time-history curves of horizontal displacement and vertical depth of detected sub mesoscale anticyclone vortex under the depthkeeping motion

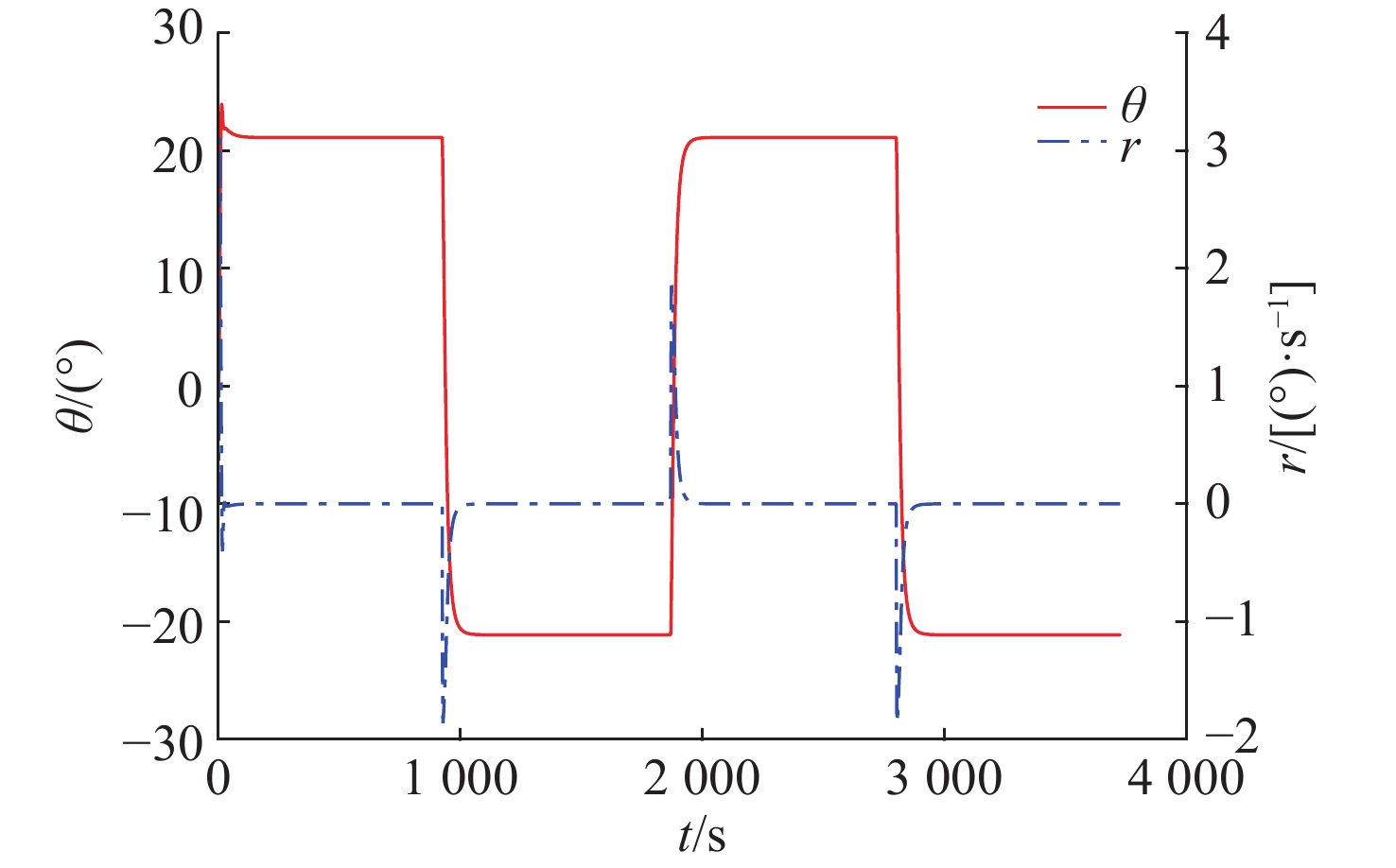
图 16 定深运动下次中尺度反气旋涡旋探测的俯仰角和角速度随时间变化曲线
Figure 16. Time-history curves of pitch angle and pitch angular velocity of detected sub mesoscale anticyclone vortex under the depthkeeping motion
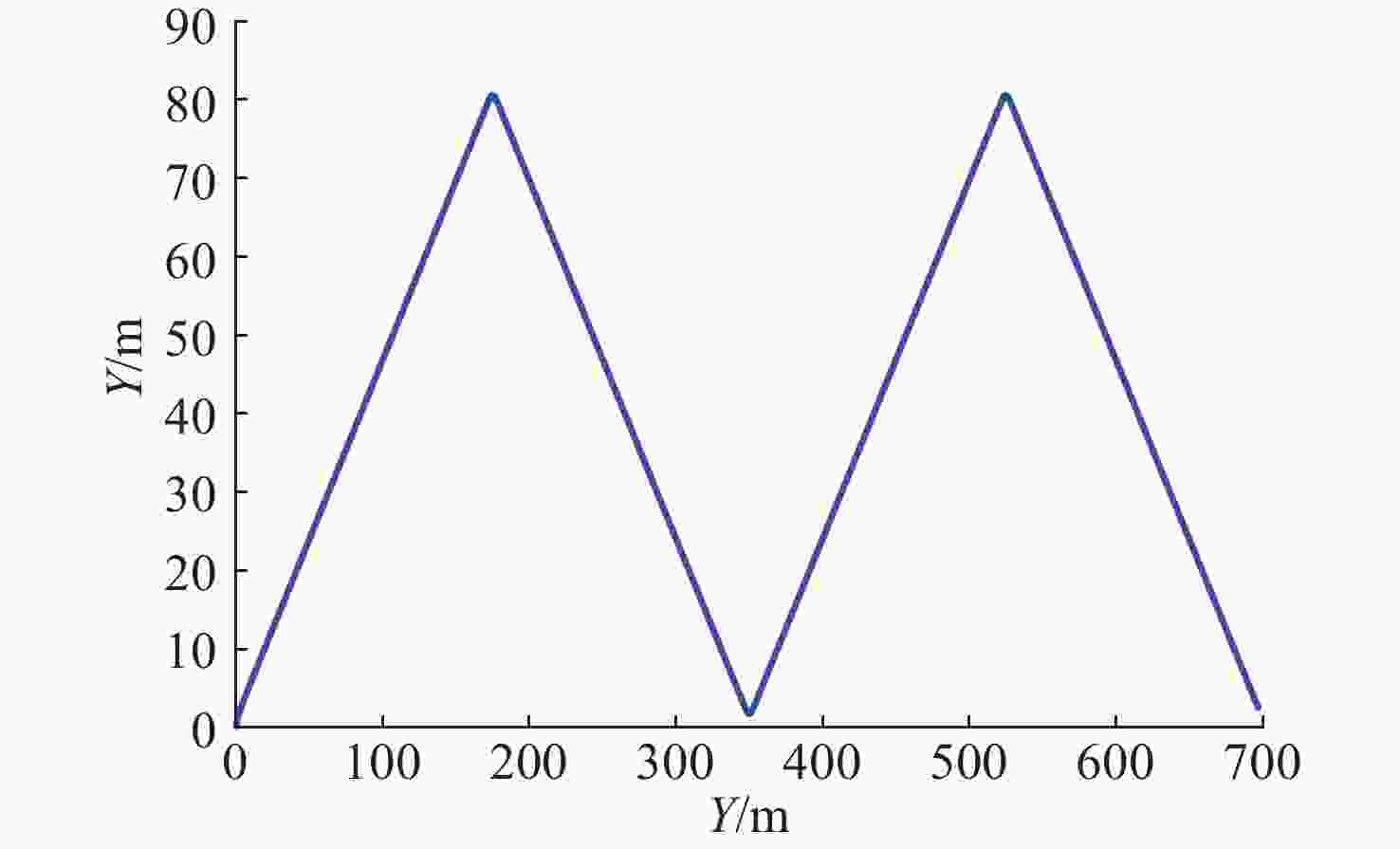
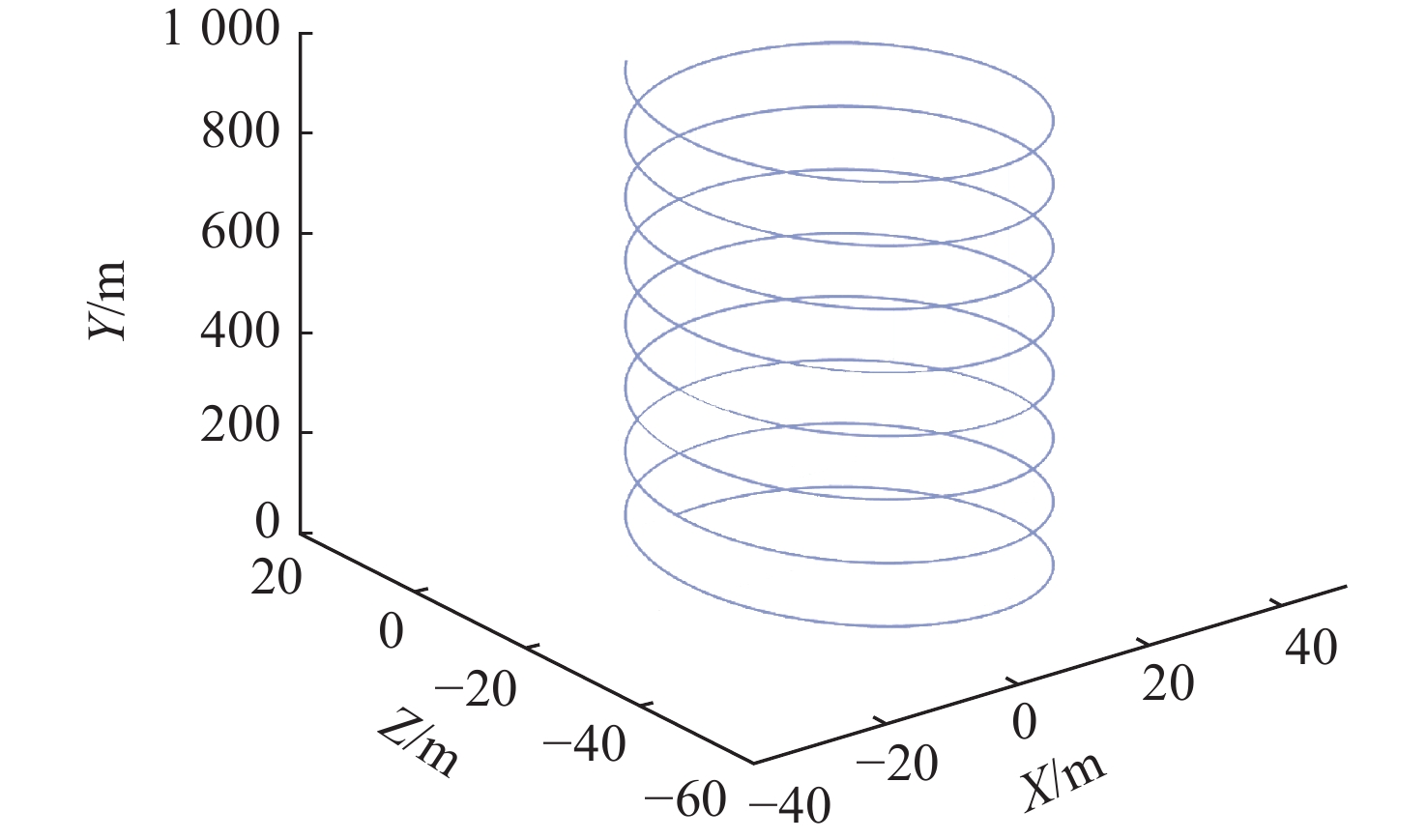
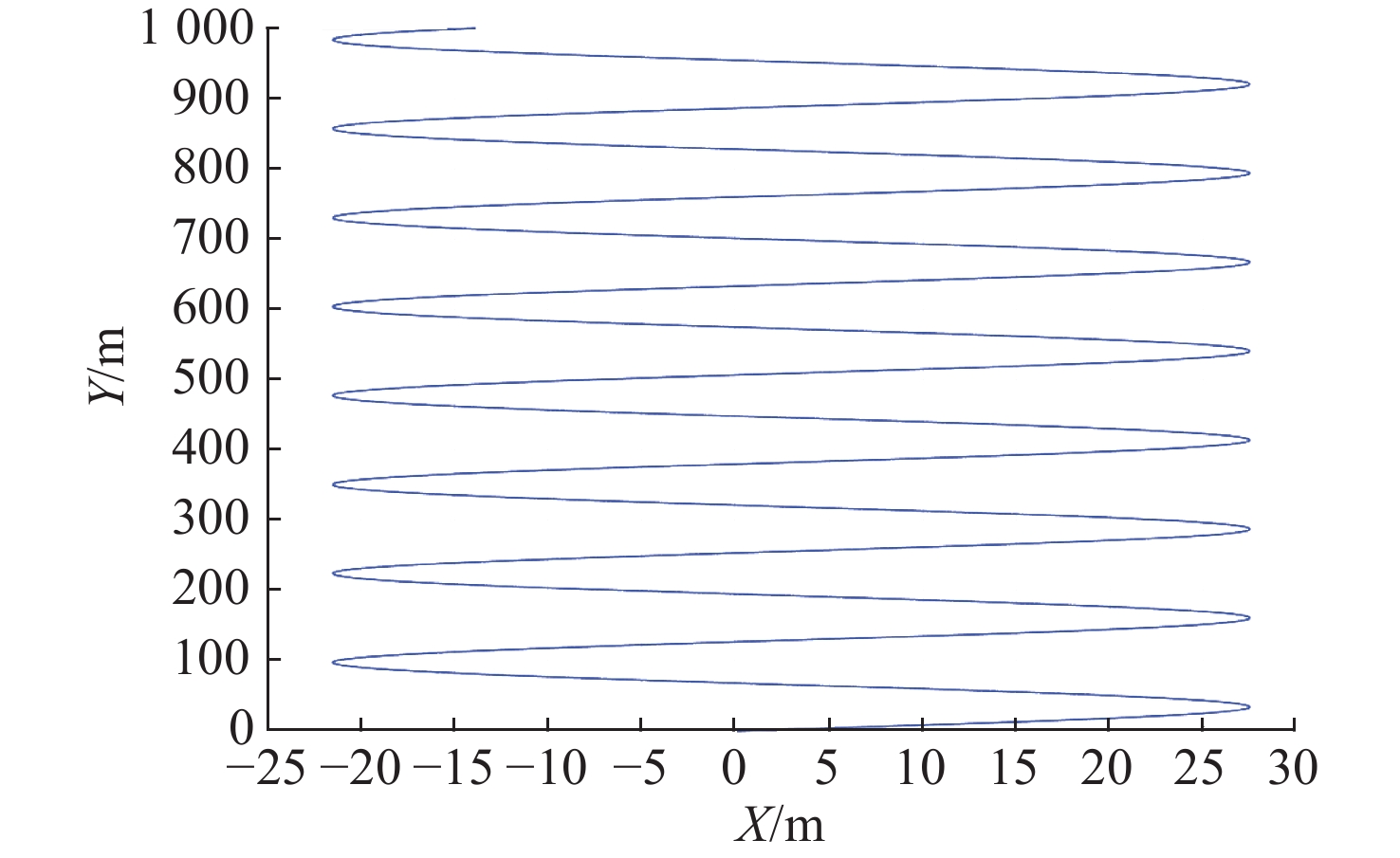
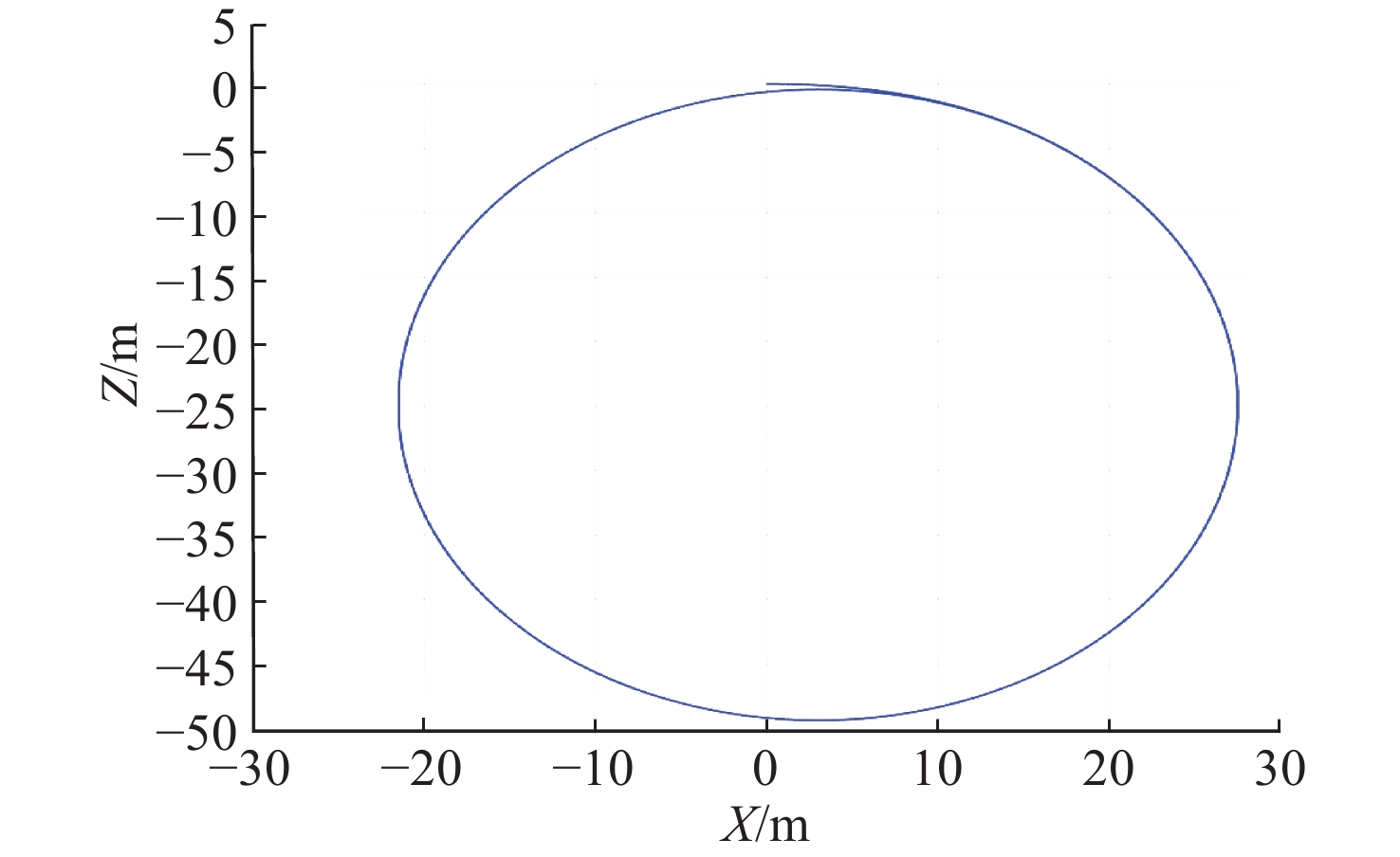
图 17 锯齿状运动下次中尺度反气旋涡旋探测的纵垂面运动轨迹
Figure 17. Trajectory on vertical plane of detected sub mesoscale anticyclone vortex under the saw-tooth motion
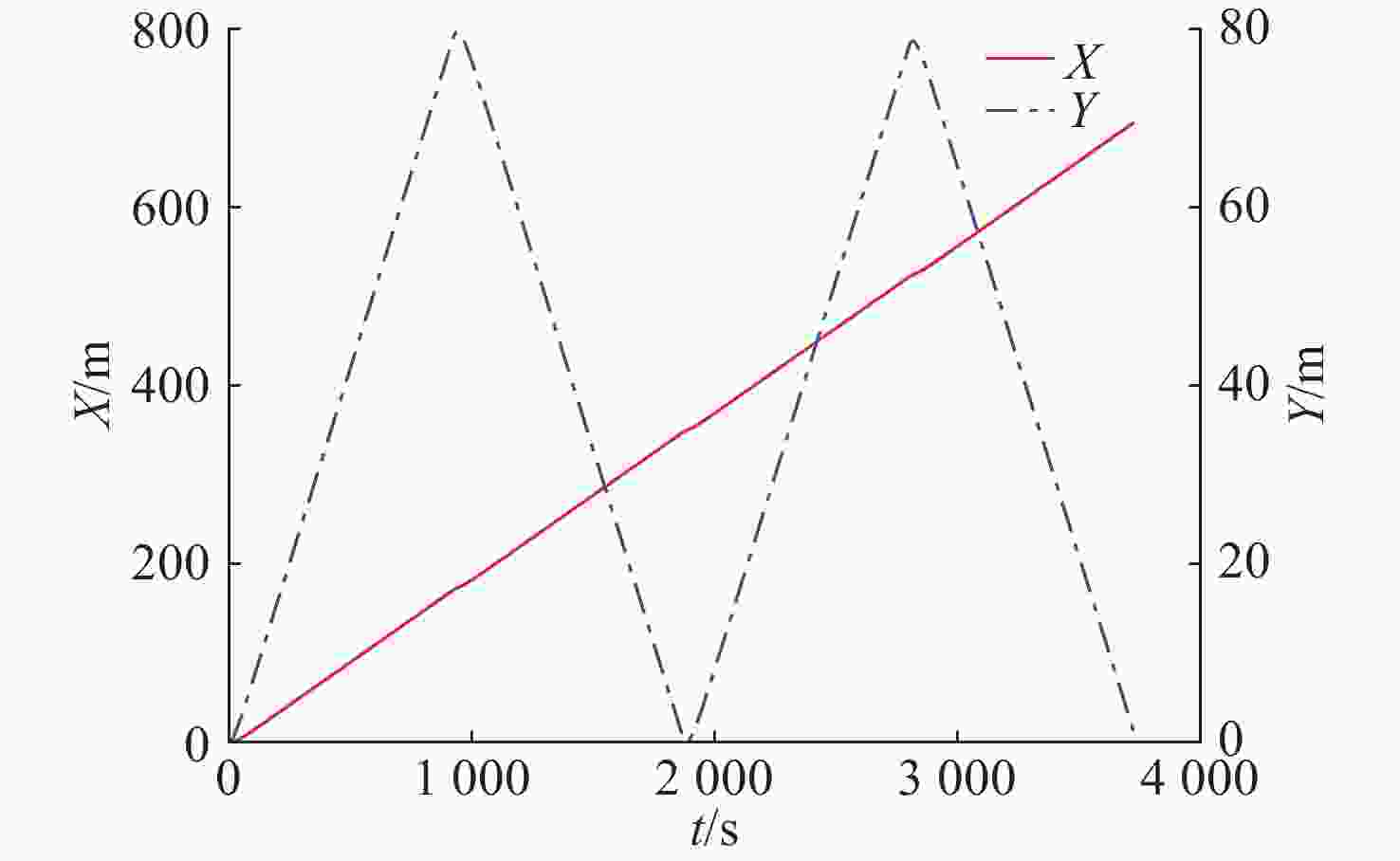
图 18 锯齿状运动下次中尺度反气旋涡旋探测的水平位移和垂直深度随时间变化曲线
Figure 18. Time-history curves of horizontal displacement and vertical depth of detected sub mesoscale anticyclone vortex under the saw-tooth motion
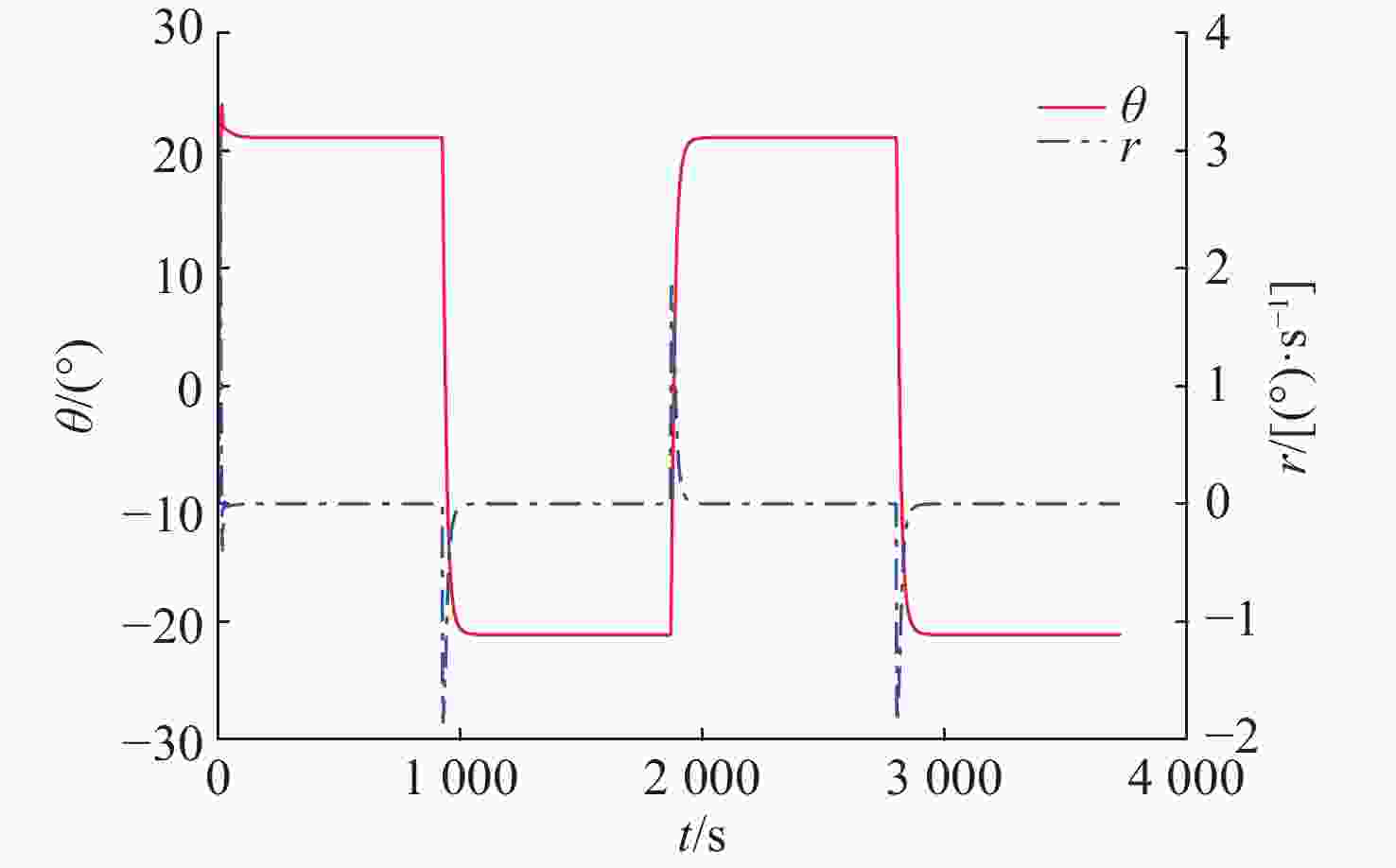
图 19 锯齿状运动下次中尺度反气旋涡旋探测的俯仰角和角速度随时间变化曲线
Figure 19. Time-history curves of pitch angle and pitch angular velocity of detected sub mesoscale anticyclone vortex under the saw-tooth motion

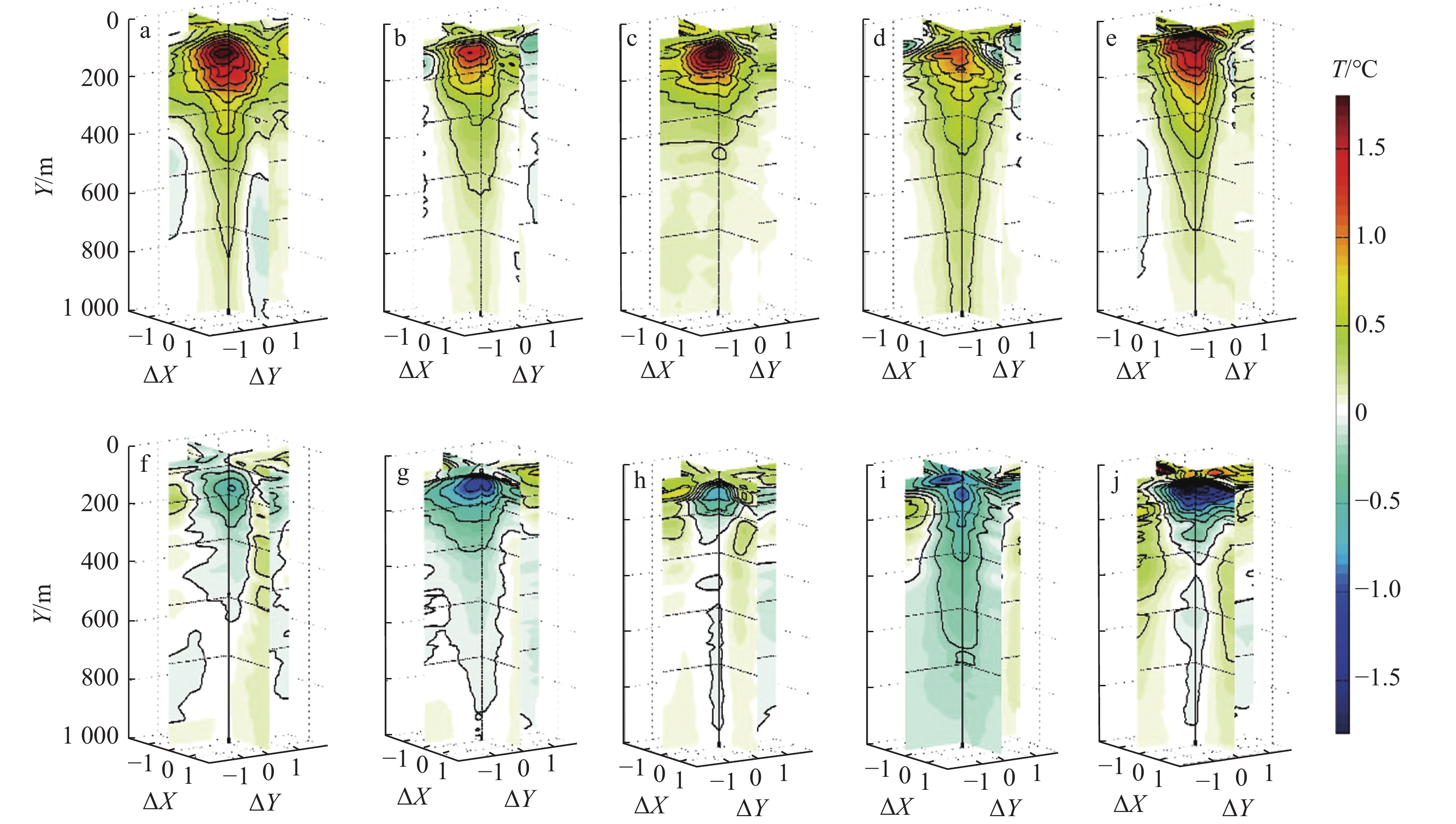
图 20 南海涡旋三维结构
Figure 20. Three dimensional structure of the vortex of the South China Sea
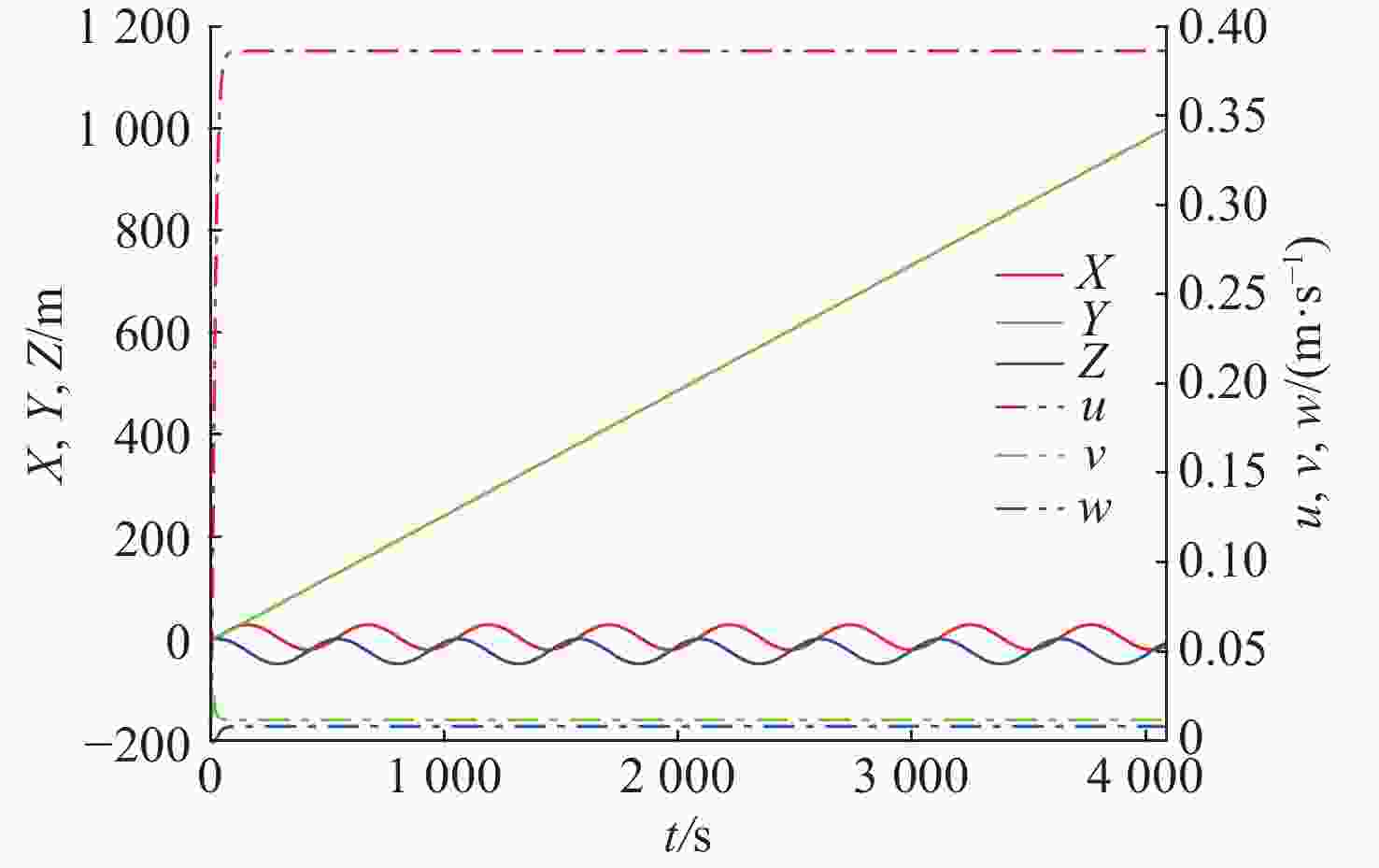
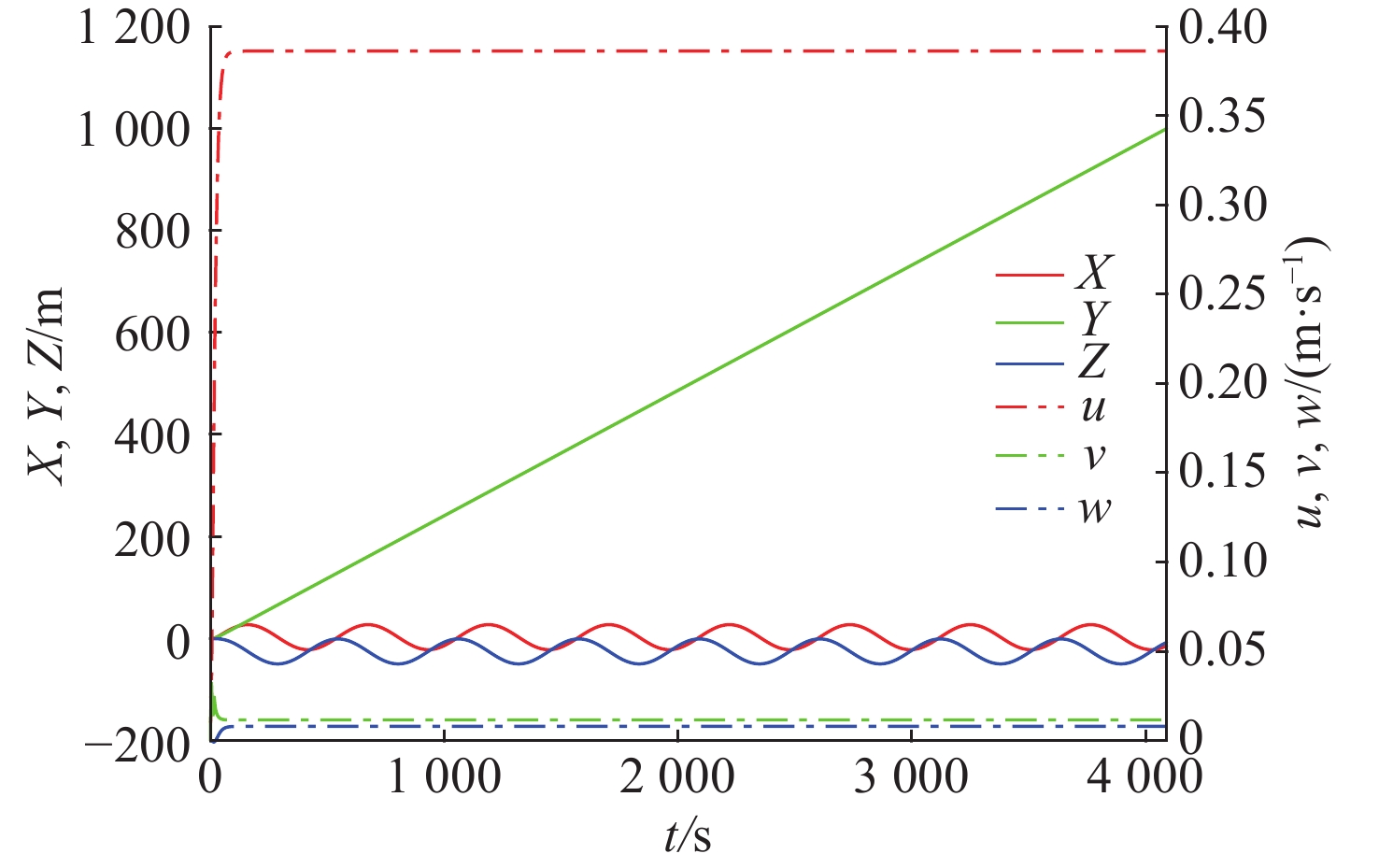
图 24 螺旋式运动下位移和速度随时间变化曲线
Figure 24. Time-history curves of displacement and velocity under the spiral motion

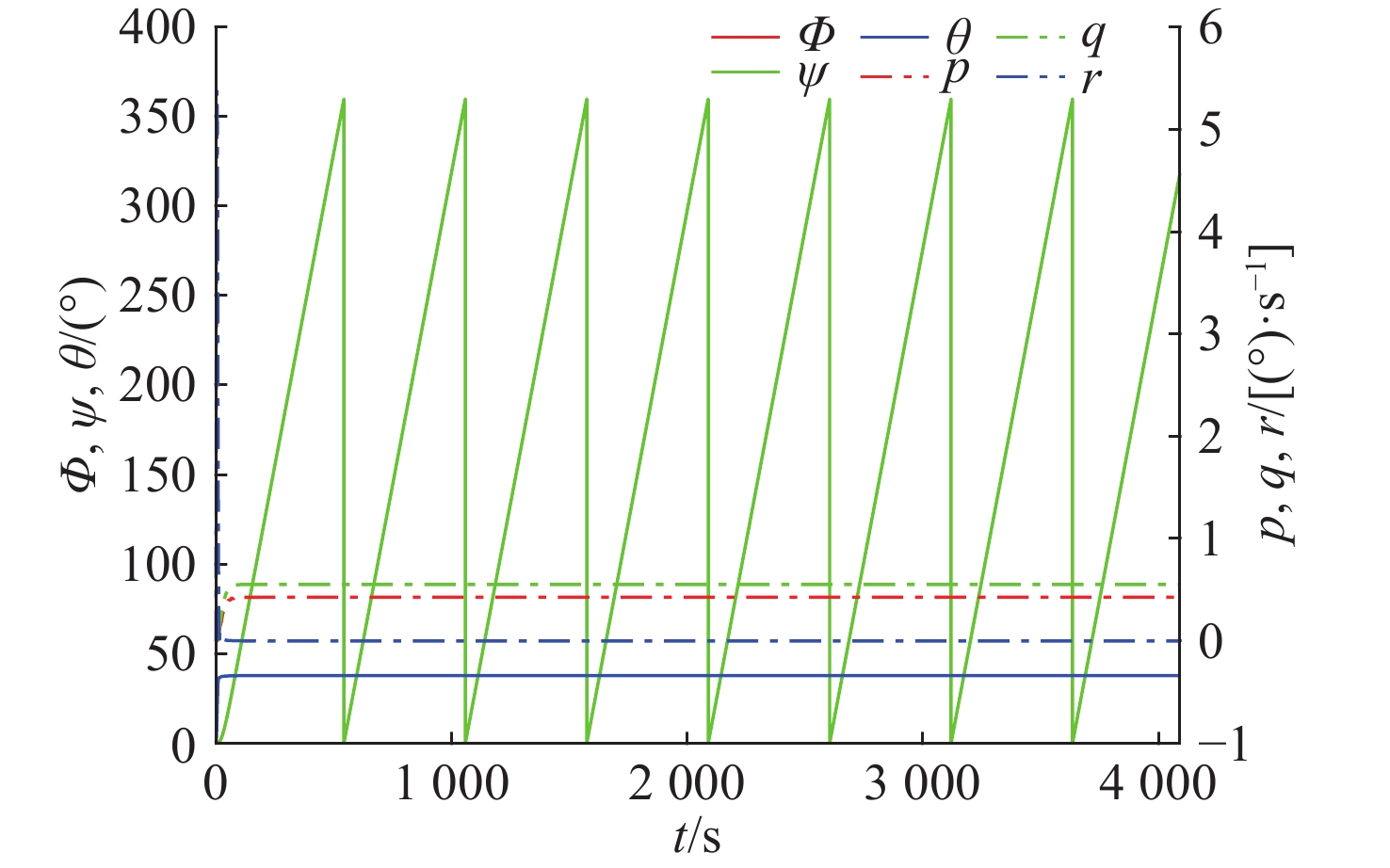
图 25 螺旋式运动下角度和角速度曲线随时间变化曲线
Figure 25. Time-history curves of angle and angular velocity under the spiral motion
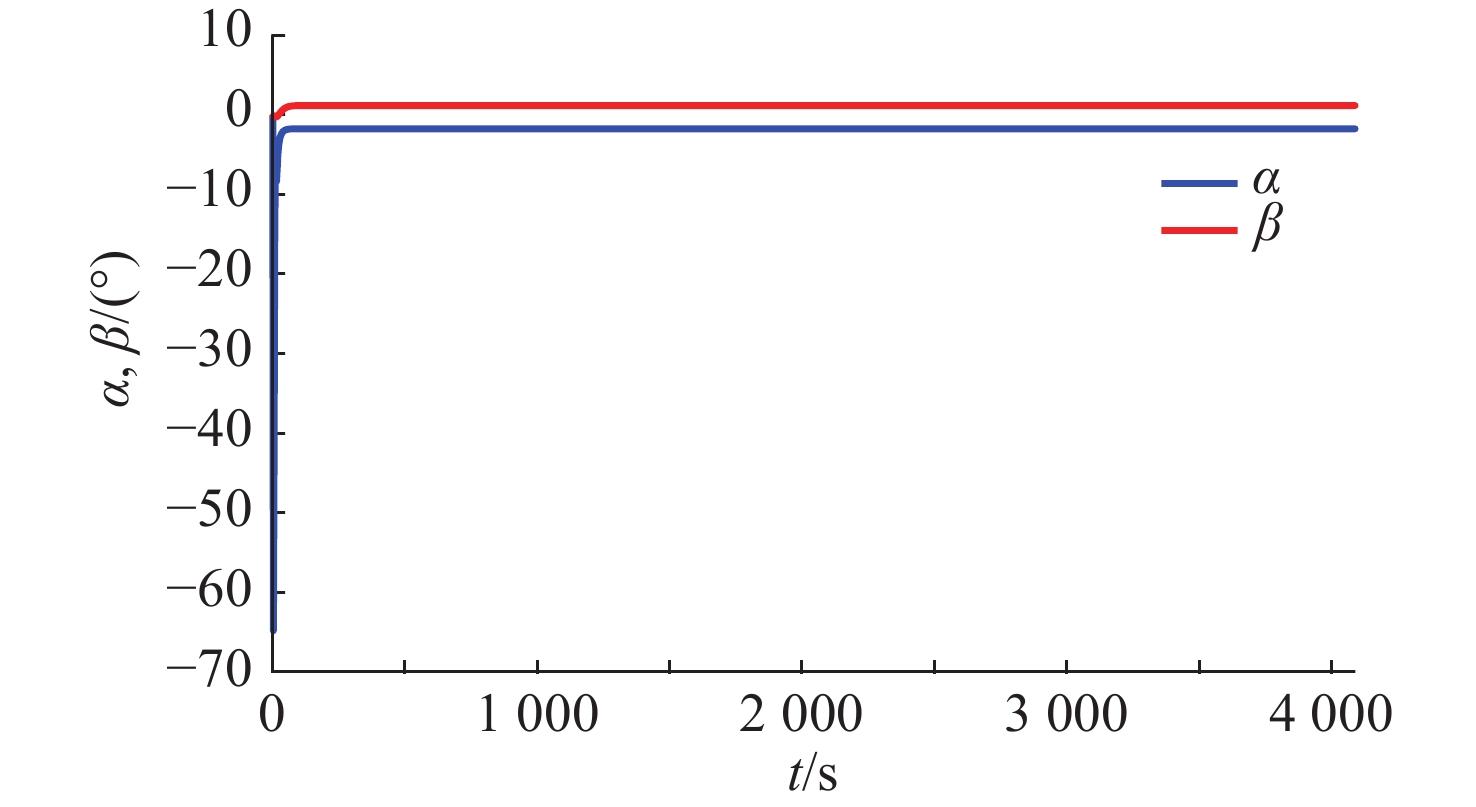
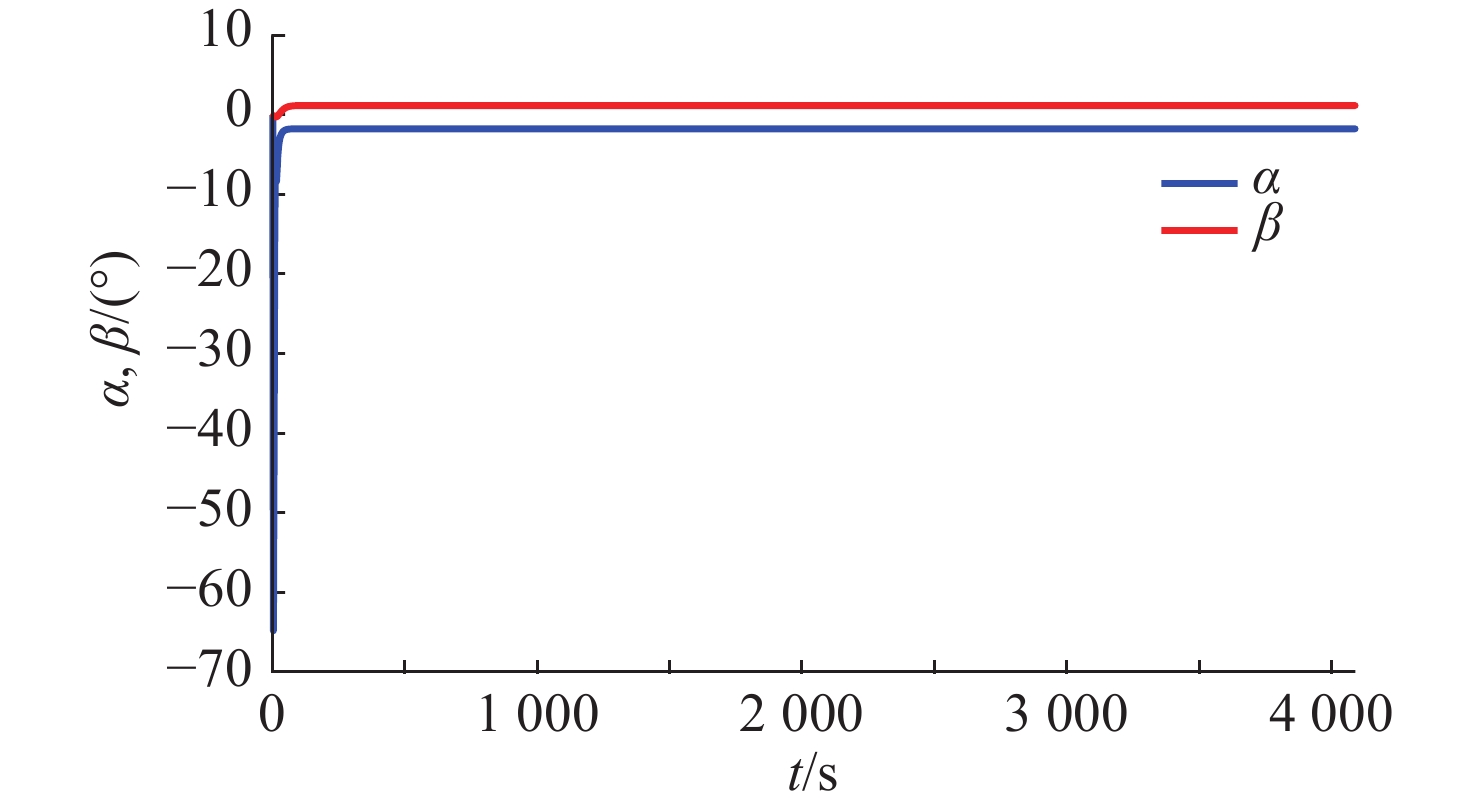
图 26 螺旋式运动下攻角和漂角随时间变化曲线
Figure 26. Time-history curves of attack angle and drift angle under the spiral motion
表 1 物理参数含义及取值
Table 1. Meanings of physical parameters and their values
物理参数 含义 数值 $ {m \mathord{\left/ {\vphantom {m {{\text{kg}}}}} \right. } {{\text{kg}}}} $ 滑翔机总质量 69 $ {{{m_p}} \mathord{\left/ {\vphantom {{{m_p}} {{\text{kg}}}}} \right. } {{\text{kg}}}} $ 俯仰调节重块质量 18 $ {\rho \mathord{\left/ {\vphantom {\rho {({\text{kg}} \cdot {{\text{m}}^{ - 3}})}}} \right. } {({\text{kg}} \cdot {{\text{m}}^{ - 3}})}} $ 海水密度 1 022 $ {g \mathord{\left/ {\vphantom {g {({\text{m}} \cdot {{\text{s}}^{ - 2}})}}} \right. } {({\text{m}} \cdot {{\text{s}}^{ - 2}})}} $ 重力加速度 9.8 $ {{{\lambda _{11}}} \mathord{\left/ {\vphantom {{{\lambda _{11}}} {{\text{kg}}}}} \right. } {{\text{kg}}}} $ x方向上以单位(角)加速度运动时
在x方向的附加质量2 $ {{{\lambda _{22}}} \mathord{\left/ {\vphantom {{{\lambda _{22}}} {{\text{kg}}}}} \right. } {{\text{kg}}}} $ y方向上以单位(角)加速度运动时
在y方向的附加质量75.8 $ {{{\lambda _{66}}} \mathord{\left/ {\vphantom {{{\lambda _{66}}} {({\text{kg}} \cdot {{\text{m}}^{ - 2}})}}} \right. } {({\text{kg}} \cdot {{\text{m}}^{ - 2}})}} $ 附加惯矩 31.0 $ {{{\lambda _{26}}} \mathord{\left/ {\vphantom {{{\lambda _{26}}} {({\text{kg}} \cdot {{\text{m}}^{ - 1}})}}} \right. } {({\text{kg}} \cdot {{\text{m}}^{ - 1}})}} $ 附加静矩 −12 $ {{{J_{Bz}}} \mathord{\left/ {\vphantom {{{J_{Bz}}} {({\text{kg}} \cdot {{\text{m}}^{ - 2}})}}} \right. } {({\text{kg}} \cdot {{\text{m}}^{ - 2}})}} $ 转动惯量 22.3 $ {{{y_G}} \mathord{\left/ {\vphantom {{{y_G}} {\text{m}}}} \right. } {\text{m}}} $ 质心与浮心间的位置分量 0.004 7 $ {{{A_D}} \mathord{\left/ {\vphantom {{{A_D}} {{{\text{m}}^2}}}} \right. } {{{\text{m}}^2}}} $ 滑翔机横截面积 0.038 $ {L \mathord{\left/ {\vphantom {L {\text{m}}}} \right. } {\text{m}}} $ 滑翔机主体长度 2.17 $ {{{l_b}} \mathord{\left/ {\vphantom {{{l_b}} {\text{m}}}} \right. } {\text{m}}} $ 驱动浮力作用点到浮心距离在BX轴分量 0.93 t 推力减额系数 0.16 KT 推力系数 0.34 $ {{{d_p}} \mathord{\left/ {\vphantom {{{d_p}} {\text{m}}}} \right. } {\text{m}}} $ 螺旋桨外径 0.12 $ {C_x}(0) $ 无因次轴向和竖直方向水动力力系数 −0.42 $ C_y^\alpha $ BY轴位置导数(水动力) 0.316 $ C_y^r $ BY轴旋转导数(水动力矩) −8.37 $ T_z^\alpha $ BZ轴位置导数(水动力) −0.057 3 $ T_z^r $ BZ轴旋转导数(水动力矩) −2.34  下载: 导出CSV
下载: 导出CSV
-
[1] 郑瑞玺, 经志友, 罗士浩. 南海北部反气旋涡旋边缘的次中尺度动力过程分析[J]. 热带海洋学报, 2018, 37(3): 19-25.Zheng Rui-xi, Jing Zhi-you, Luo Shi-hao. Analysis of sub-mesoscale Dynamic Processes in the Periphery of Anticyclonic Eddy in the Northern South China Sea[J]. Journal of Tropical Oceangraphy, 2018, 37(3): 19-25. [2] Li S, Wang S, Zhang F, et al. Constructing the Three-dimensional Structure of an Anticyclonic Eddy in the South China Sea Using Multiple Underwater Gliders[J]. Journal of Atmospheric and Oceanic Technology, 2019, 36(12): 2449-2470. doi: 10.1175/JTECH-D-19-0006.1 [3] 范聪慧, 于非, 南峰, 等. 基于无人船的大洋中尺度涡观测系统展望[J]. 海洋科学集刊, 2016, 51(1): 49-57. doi: 10.12036/hykxjk20160719002Fan Cong-hui, Yu Fei, Nan Feng, et al. Prospects for Unmanned Observation System of the Oceanic Mesoscale Eddy[J]. Studia Marina Sinica, 2016, 51(1): 49-57. doi: 10.12036/hykxjk20160719002 [4] 任诗鹤, 王辉, 刘娜. 中国近海海洋锋和锋面预报研究进展[J]. 地球科学进展, 2015, 30(5): 552-563. doi: 10.11867/j.issn.1001-8166.2015.05.0552Ren Shi-he, Wang Hui, Liu Na. Review of Ocean Front in Chinese Marginal Seas and Frontal Forecasting[J]. Advances in Earth Science, 2015, 30(5): 552-563. doi: 10.11867/j.issn.1001-8166.2015.05.0552 [5] 田纪伟, 黄晓冬. 认知和驾驭全球海洋最强内孤立波: 南海北部内孤立波[J]. 科技纵览, 2018(7): 76-77. doi: 10.3969/j.issn.2095-4409.2018.07.032 [6] Chelton D B, Schlax M G, Samelson R M. Global Observations of Nonlinear Mesoscale Eddies[J]. Progress in Oceanography, 2011, 91(2): 167-216. doi: 10.1016/j.pocean.2011.01.002 [7] Liu A K, Ramp S R, Zhao Y, et al. A Case Study of Internal Solitary Wave Propagation during ASIAEX 2001[J]. IEEE Journal of Oceanic Engineering, 2004, 29(4): 1144-1156. doi: 10.1109/JOE.2004.841392 [8] Simmons H, Chang M H, Chang Y T, et al. Modeling and Prediction of Internal Waves in the South China Sea[J]. Oceanography, 2011, 24(4): 88-99. doi: 10.5670/oceanog.2011.97 [9] 杨廷龙. 日本海海洋锋及涡旋的统计分析[D]. 青岛: 自然资源部第一海洋研究所, 2021. [10] Alford M H, Mickett J B, Zhang S, et al. Internal Waves on the Washington Continental Shelf[J]. Oceanography, 2012, 25(2): 66-79. doi: 10.5670/oceanog.2012.43 [11] Johnston T M S, Rudnick D L, Alford M H, et al. Internal Tidal Energy Fluxes in the South China Sea from Density and Velocity Measurements by Gliders[J]. Journal of Geophysical Research: Oceans, 2013, 118(8): 3939-3949. doi: 10.1002/jgrc.20311 [12] Fan X, Send U, Testor P, et al. Observations of Irminger Sea Anticyclonic Eddies[J]. Journal of Physical Oceanography, 2013, 43(4): 805-823. doi: 10.1175/JPO-D-11-0155.1 [13] Li S, Wang S, Zhang F, et al. Observing an Anticyclonic Eddy in the South China Sea Using Multiple Underwater Gliders[C]//OCEANS 2018 MTS/IEEE Charleston. Charleston: IEEE, 2018. [14] Li S, Zhang F, Wang S, et al. Constructing the Three-Dimensional Structure of an Anticyclonic Eddy with the Optimal Configuration of an Underwater Glider Network[J]. Applied Ocean Research, 2020, 95: 101893. doi: 10.1016/j.apor.2019.101893 [15] 刘方. 混合驱动水下滑翔机系统设计与运动行为研究[D]. 天津: 天津大学, 2014. [16] 李天森. 鱼雷操纵性[M]. 北京: 国防工业出版社, 2007. [17] Wang Y, Niu W, Yu X, et al. Quantitative Evaluation of Motion Performances of Underwater Gliders Considering Ocean Currents[J]. Ocean Engineering, 2021, 236: 109501. doi: 10.1016/j.oceaneng.2021.109501 [18] Flexas M M, Troesch M I, Chien S, et al. Autonomous Sampling of Ocean Submesoscale Fronts with Ocean Gliders and Numerical Model Forecasting[J]. Journal of Atmospheric and Oceanic Technology, 2018, 35(3): 503-521. doi: 10.1175/JTECH-D-17-0037.1 [19] 谢旭丹, 王静, 储小青, 等. 南海中尺度涡温盐异常三维结构[J]. 海洋学报, 2018, 40(4): 1-14.Xie Xu-dan, Wang Jing, Chu Xiao-qing, et al. Three-dimensional Thermohaline Anomaly Structures of Me-soscale Eddies in the South China Sea[J]. Acta Oceanologica Sinica, 2018, 40(4): 1-14. [20] 杨绍琼, 成丹, 陈光耀, 等. 面向典型海洋现象观测的水下滑翔机应用综述[J]. 热带海洋学报, 2022, 41(3): 54-74. doi: 10.11978/2021066Yang Shao-qiong, Cheng Dan, Chen Guang-yao, et al. Re- view on the Application of Underwater Gliders for Obs- erving Typical Ocean Phenomena[J]. Journal of Tropical Oceanography, 2022, 41(3): 54-74. doi: 10.11978/2021066 [21] Farrar J T, D’Asaro E, Rodriguez E, et al. S-MODE: The Sub-Mesoscale Ocean Dynamics Experiment[C]//2020 IEEE International Geoscience and Remote Sensing Symposium. Waikoloa: IEEE, 2020. [22] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.Shen Xin-rui, Wang Yan-hui, Yang Shao-qiong, et al. Development of Underwater Gliders: An Overview and Prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106. -





 点击查看大图
点击查看大图
计量
- 文章访问数: 160
- HTML全文浏览量: 45
- PDF下载量: 24
- 被引次数: 0




