| Citation: | XU Xiao-jun, LIU Bo-long, PAN Di-bo, LU Xing-ju. Research and Application of Amphibious Bionic Robots[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 143-151. doi: 10.11993/j.issn.2096-3920.2022-0083

|

| [1] |
苏宗帅. 水陆两栖仿生机器人研究进展及应用[J]. 国防科技, 2019, 40(4): 50-54. doi: 10.13943/j.issn1671-4547.2019.04.11
Su Zong-shuai. Research Developments of Amphibious Robots and Applications[J]. National Defense Technology, 2019, 40(4): 50-54. doi: 10.13943/j.issn1671-4547.2019.04.11
|
| [2] |
Ren K, Yu J. Research Status of Bionic Amphibious Robots: A Review[J]. Ocean Engineering, 2021, 227: 1-18.
|
| [3] |
郑文哲. 基于CFD 的两栖仿生机器人水动力特性研究[D]. 西安: 西安理工大学, 2021.
|
| [4] |
马宇科, 郑亮, 胡高凯, 等. 两栖球形机器人的路径规划策略[J]. 光学精密工程, 2020, 28(8): 1733-1742.
Ma Yu-ke, Zheng Liang, Hu Gao-kai, et al. Path Planning Strategy of Amphibious Spherical Robot[J]. Optics and Precision Engineering, 2020, 28(8): 1733-1742.
|
| [5] |
曾钧生. 融合水下滑翔的两栖仿生机械蟹总体结构设计和游动仿真分析[D]. 深圳: 深圳大学, 2020.
|
| [6] |
杨清海, 喻俊志, 谭民, 等. 两栖仿生机器人研究综述[J]. 机器人, 2007, 29(6): 601-608. doi: 10.3321/j.issn:1002-0446.2007.06.016
Yang Qing-hai, Yu Jun-zhi, Tan Min, et al. Amphibious Biomimetic Robots: A Review[J]. Robot, 2007, 29(6): 601-608. doi: 10.3321/j.issn:1002-0446.2007.06.016
|
| [7] |
赵旭. 基于单目视觉的蛇形机器人SLAM技术研究[D]. 北京: 北京理工大学, 2018.
|
| [8] |
陈丽, 王越超, 李斌. 蛇形机器人研究现况与进展[J]. 机器人, 2002, 24(6): 559-563. doi: 10.3321/j.issn:1002-0446.2002.06.017
Chen Li, Wang Yue-chao, Li Bin. Present State and Future Direction Towards Snake-robot Research[J]. Robot, 2002, 24(6): 559-563. doi: 10.3321/j.issn:1002-0446.2002.06.017
|
| [9] |
Huang J, Du Z, Wang C, et al. Research Progress of a Multi-joint Snake Robot[C]//2022 8th International Conference on Control, Automation and Robotics (ICCAR). Qingdao, China: IEEE, 2022.
|
| [10] |
Hirose S. Snake-Like Robots, Machine Design of Biologically Inspired Robots[J]. IEEE Robotics & Automation Magazine, 2009, 16(1): 88-98.
|
| [11] |
Yamada H. Development of Amphibious Snake-like Robot Acm-R5[C]//36th International Symposium on Robotics(Isr 2005). Tokyo: IEEE, 2005.
|
| [12] |
Hirose S, Mori M, Yamada H, et al. Design and Control of Amphibious Snake-like Robot ACM-R5[C]//Nippon Kikai Gakkai Robotikusu, Mekatoronikusu Koenkai Koen Ronbunshu (CD-ROM), [S.l. : s.n.], 2005.
|
| [13] |
Crespi A, Badertscher A, Guignard A, et al. Swimming and Crawling with an Amphibious Snake Robot[C]//2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005.
|
| [14] |
王握文. 五硕士造“蛇”记——我国首台蛇形机器人研制纪实[J]. 发明与革新, 2002(1): 15-16.
|
| [15] |
Yu S, Ma S, Li B, et al. An Amphibious Snake-like Robot with Terrestrial and Aquatic Gaits[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011.
|
| [16] |
周耿. 水陆两栖蛙板机器人的设计、建模与控制[D]. 北京: 北京理工大学, 2016.
|
| [17] |
Yi Y, Geng Z, Zhang J Q, et al. Design, Modeling and Control of a Novel Amphibious Robot with Dual-swing-legs Propulsion Mechanism[C]//2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Hamburg, Germany: IEEE, 2015.
|
| [18] |
张伟. 仿生青蛙机器人及其游动轨迹规划的研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
|
| [19] |
党红星. 仿生龟水下清淤机器人的机构设计与步态研究[D]. 哈尔滨: 哈尔滨工程大学, 2021.
|
| [20] |
Baines R, Patiballa S K, Booth J, et al. Multi-environment Robotic Transitions through Adaptive Morphogenesis[J]. Nature, 2022, 610(7931): 283-289. doi: 10.1038/s41586-022-05188-w
|
| [21] |
Crespi A, Karakasiliotis K, Guignard A, et al. Salamandra Robotica II: An Amphibious Robot to Study Salamander-like Swimming and Walking Gaits[J]. IEEE Transactions on Robotics, 2013, 29(2): 308-320. doi: 10.1109/TRO.2012.2234311
|
| [22] |
Chalmers P. Lobster Special[J]. Mechanical Engineering, 2000, 122(9): 82-84. doi: 10.1115/1.2000-SEP-5
|
| [23] |
Ayers J. Underwater Walking[J]. Arthropod Structure & Development, 2004, 33(3): 347-360.
|
| [24] |
Kim J Y, Jun B H. Design of Six-legged Walking Robot, Little Crabster for Underwater Walking and Operation[J]. Advanced Robotics, 2014, 28(1/2): 77-89.
|
| [25] |
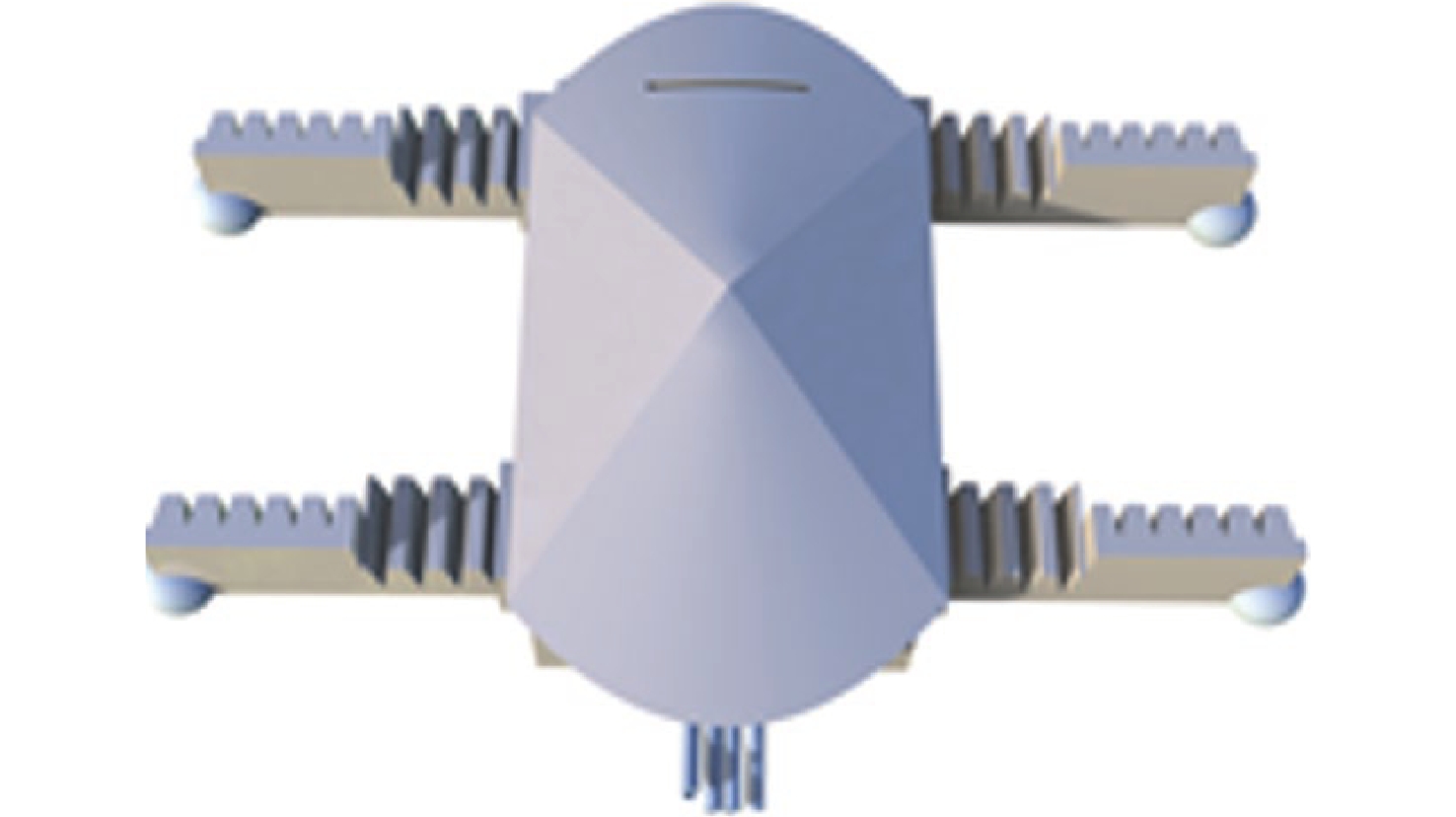
Jin H, Dong E, Alici G, et al. A Starfish Robot Based on Soft and Smart Modular Structure(SMS) Actuated by SMA Wires[J]. Bioinspiration & Biomimetics, 2016, 11(5): 1-9.
|
| [26] |
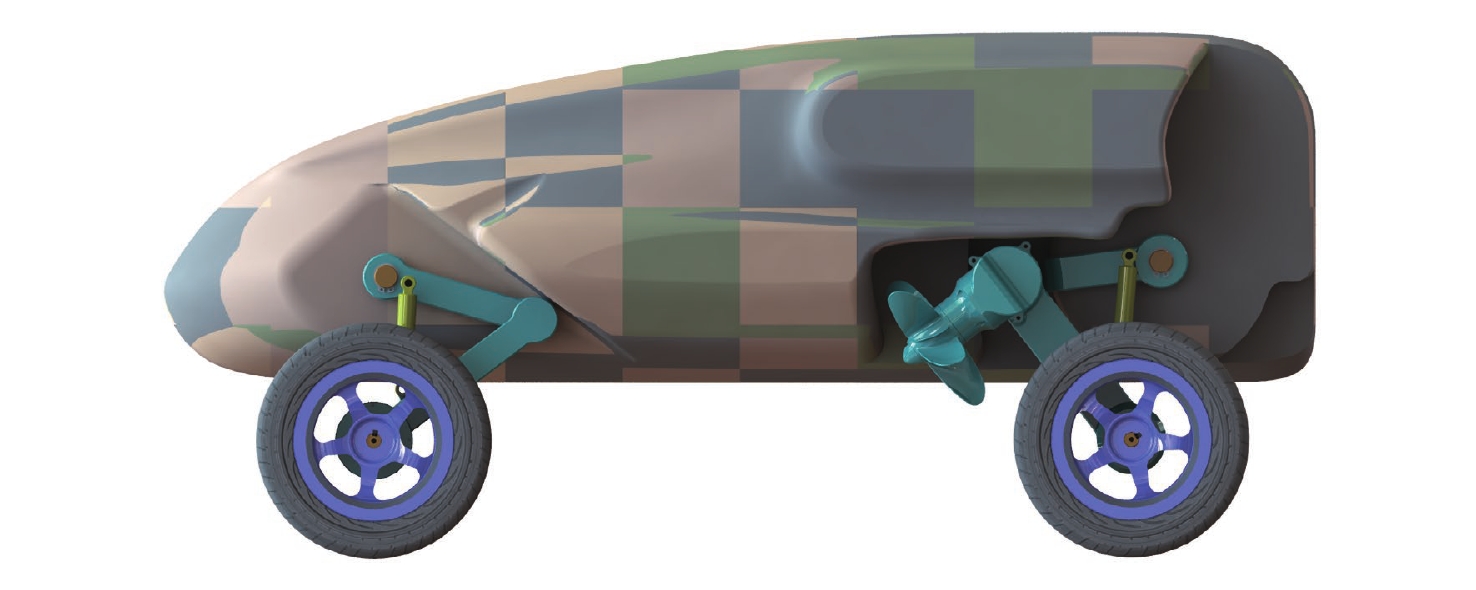
Ma X, Wang G, Liu K. Design and Optimization of a Multimode Amphibious Robot with Propeller-Leg[J]. IEEE Transactions on Robotics, 2022, 38(6): 3807-3820.
|
| [27] |
Boxerbaum A S, Werk P, Quinn R D, et al. Design of an Autonomous Amphibious Robot for Surf Zone Operation: Part I Mechanical Design for Multi-mode Mobility[C]//Proceedings 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Barcelona, Spain: IEEE, 2005.
|
| [28] |
Liu B, Xu X, Pan D. Frog Plunge-diving of Deformable Amphibious Robot[C]//2022 IEEE International Conference on Robotics and Biomimetics(ROBIO). Xishuangbanna, China: IEEE, 2022.
|
| [29] |
Cai T, Pan D, Xu X, et al. Hydrodynamic Performance in Wave Condition of Autonomous Amphibious Robots[C]//Journal of Physics: Conference Series. Changsha China: IOP Publishing, 2023.
|
| [30] |
何彦霖, 祝连庆, 孙广开, 等. 小型两栖球形机器人陆地运动建模及实验分析[J]. 仪器仪表学报, 2018, 39(12): 100-108. doi: 10.19650/j.cnki.cjsi.j1803967
He Yan-lin, Zhu Lian-qing, Sun Guang-kai, et al. Study on On-land Kinematic Modeling and Experiment of Small-scaled Amphibious Spherical Robot[J]. Chinese Journal of Scientific Instrument, 2018, 39(12): 100-108. doi: 10.19650/j.cnki.cjsi.j1803967
|
| [31] |
郭书祥, 孙珊, 郭健. 新型仿生水下子母机器人系统设计[J]. 控制与决策, 2019, 34(5): 1004-1010.
Guo Shu-xiang, Sun Shan, Guo Jian. Design of a Novel Biomimetic Underwater Mother-son Robot System[J]. Control and Decision, 2019, 34(5): 1004-1010.
|
| [32] |
Maciver M A, Fontaine E, Burdick J W. Designing Future Underwater Vehicles: Principles and Mechanisms of the Weakly Electric Fish[J]. IEEE Journal of Oceanic Engineering, 2004, 29(3): 651-659. doi: 10.1109/JOE.2004.833210
|
| [33] |
Zeng Y, Hu Q, Yin S, et al. The Ground Motion Dynamics Analysis of a Bionic Amphibious Robot with Undulatory Fins[C]//2021 IEEE International Conference on Real-time Computing and Robotics(RCAR). Xining, China: IEEE, 2021.
|
| [34] |
殷谦, 尚建忠, 蒋涛, 等. 柔性波动鳍两栖机器人鳍面结构设计与运动仿真[J]. 工程热物理学报, 2021, 42(11): 2954-2959.
Yin Qian, Shang Jian-Zhong, Jiang Tao, et al. The Structural Design and Motion Simulation of the Flexible Undulating Fins on the Amphibious Robot[J]. Journal of Engineering Thermophysics, 2021, 42(11): 2954-2959.
|
| [35] |
郁树梅, 王明辉, 马书根, 等. 水陆两栖蛇形机器人的研制及其陆地和水下步态[J]. 机械工程学报, 2012, 48(9): 18-25. doi: 10.3901/JME.2012.09.018
Yu Shu-mei, Wang Ming-hui, Ma Shu-gen, et al. Development of an Amphibious Snake-like Robot and Its Gaits on Ground and in Water[J]. Journal of Mechanical Engineering, 2012, 48(9): 18-25. doi: 10.3901/JME.2012.09.018
|
| [36] |
Wu M X, Xu X X, Zhao Q, et al. A Fully 3D-Printed Tortoise-Inspired Soft Robot with Terrains-Adaptive and Amphibious Landing Capabilities[J]. Advanced Materials Technologies, 2022, 7(12): 2200536. doi: 10.1002/admt.202200536
|
| [37] |
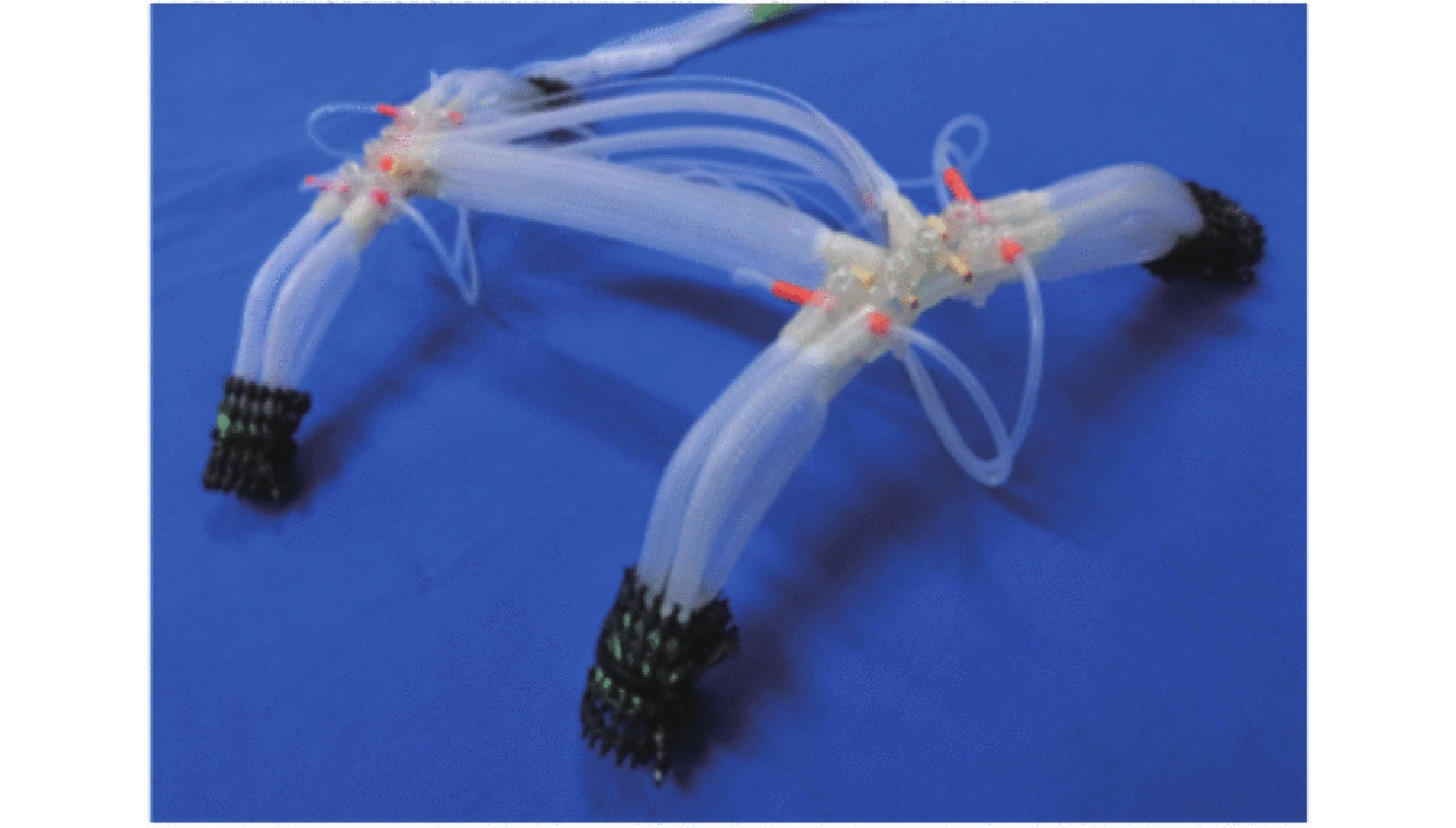
Faudzi A A M, Razif M R M, Endo G, et al. Soft-amphibious Robot Using Thin and Soft McKibben Actuator[C]//2017 IEEE International Conference on Advanced Intelligent Mechatronics(AIM). Munich, Germany: IEEE, 2017.
|
| [38] |
Tang Y, Zhang Q, Lin G, et al. Switchable Adhesion Actuator for Amphibious Climbing Soft Robot[J]. Soft Robotics, 2018, 5(5): 592-600. doi: 10.1089/soro.2017.0133
|
| [39] |
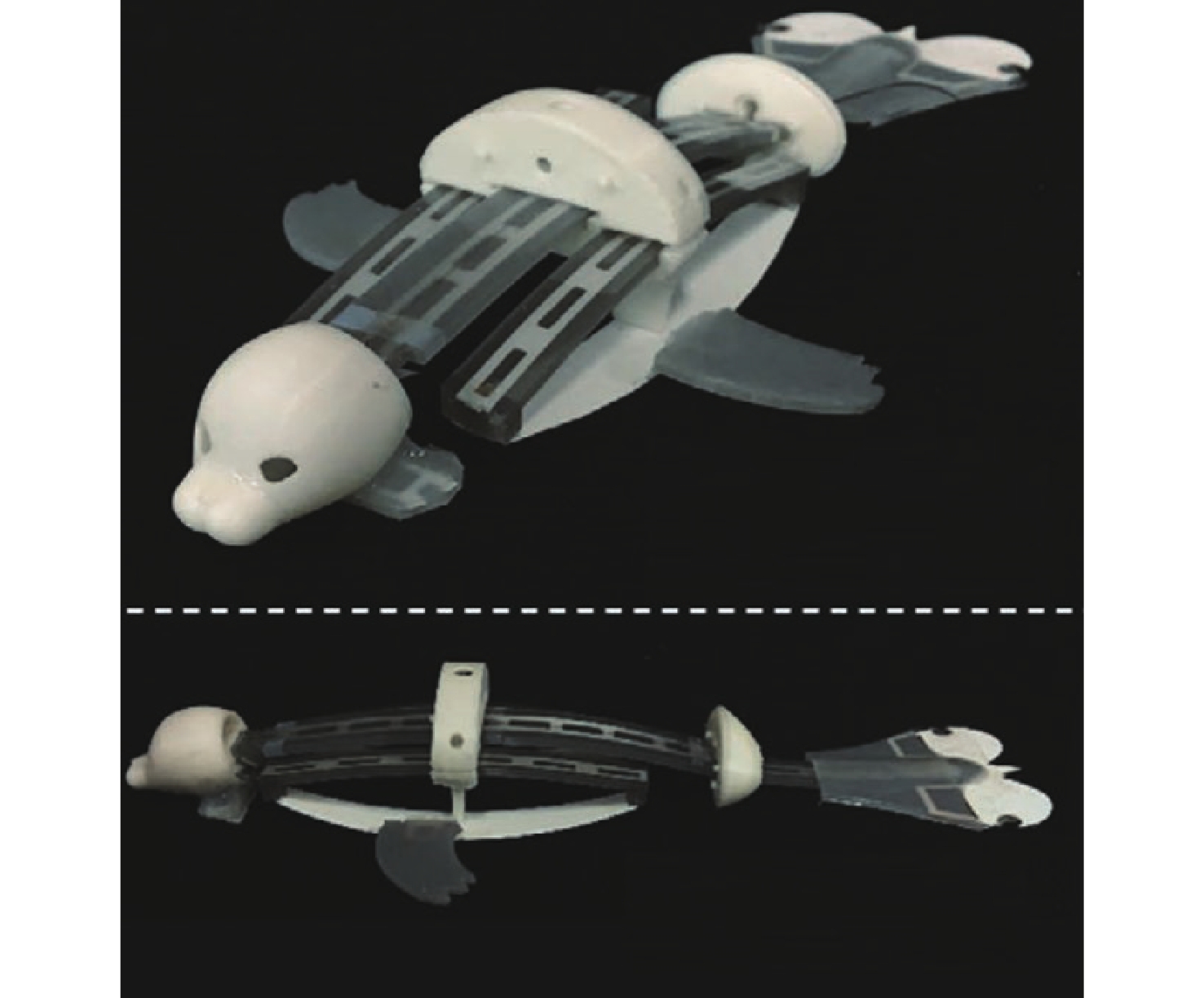
Hwang J H, Wang W D. Shape Memory Alloy-Based Soft Amphibious Robot Capable of Seal-Inspired Locomotion[J]. Advanced Materials Technologies, 2022, 7(6): 2101153. doi: 10.1002/admt.202101153
|
Figures(21)


Supported by
Beijing Renhe Information Technology Co., Ltd.

 Taobao
Taobao
 Micro
Micro


 DownLoad:
DownLoad: