

Development Trend of Target Non-Acoustic Detection Technology Based on Unmanned Undersea Vehicles
-
摘要: 以自主水下航行器、水下滑翔机等为代表的无人水下航行器(UUV)在水下目标探测方面, 具有成本低、隐蔽性好、机动性高、灵活组网部署易等优势。随着消声技术的发展和成熟化应用, 潜艇等大型水下航行器的自噪声已接近海洋背景噪声, 单一依靠声波信息进行水下目标探测的技术已不再具有普适化优势, 光、电、磁等非声探测技术已逐步显示出优越性。发挥UUV的航行优势, 搭载光、电、磁等非声探测传感器, 开展目标发现的尝试已逐步成为新的发展和应用方向。文章在分析总结当前UUV已搭载的非声探测传感器的种类、原理和应用情况的基础上, 指出了磁异探测、激光探测、电场探测、重力梯度探测和生物探测等主要研究方向和进展, 归纳了当前基于UUV开展非声探测的关键技术问题和技术难点, 并对发展方向进行了展望, 为非声探测技术的提升提供一定的借鉴。Abstract: Unmanned undersea vehicles(UUVs) represented by autonomous undersea vehicles and autonomous underwater gliders have the advantages of low cost, good concealment, high mobility, and easy deployment in flexible networks in underwater target detection. With the development and mature application of anechoic technology, the self-noise of submarines and other large underwater vehicles is close to the background noise of the ocean, and the underwater target detection technology relying on only acoustic information no longer has universal advantages, and non-acoustic detection technologies involving light, electricity, and magnetism have gradually shown superiority. Utilizing the navigational advantages of UUVs, carrying optical, electrical, magnetic, and other non-acoustic detection sensors to carry out target discovery attempts has gradually become a new development and application direction. Based on the analysis and summary of the types, principles, and applications of non-acoustic detection sensors already carried by current UUVs, this paper pointed out the main research directions and progress of magnetic anomaly detection, laser detection, electric field detection, gravity gradient detection, and biological detection and summarized the current key technical problems and technical difficulties of non-acoustic detection based on UUVs. It also predicted the development direction, so as to provide some references for enhancing non-acoustic detection technologies.
-
表 1 不同探测平台探测形式及特点对比
Table 1. Comparison of detection forms and characteristics of different detection platforms
平台 主要形式 典型设备 特点 天基 光学侦查卫星 美国锁眼-12( KH-12) 光学卫星 观测幅宽40~50 km, 分辨率0.1~ 0.15 m, 受天气影响 红外遥感卫星 美国SBWASS-Navy 系统 灵敏度高, 可探测水面舰艇和潜艇 合成孔径雷达卫星 美国Lacrosse雷达卫星 标准模式下, 分辨率 1 m, 精扫模式下0.3 m, 覆盖面积几百平方千米, 不受天气影响 空基 固定翼反潜机 美国P-3系列反潜机 配有GPS、搜索雷达、光电感测系统、红外线侦测系统和先进信号处理系统, 最大任务航程超4000 km 反潜直升机 美国SH-60B“海鹰” 配备AN/APS-124 搜索雷达, 探测距离240 km, 配备AN/ASQ-81(V)2磁异探测仪以及声呐浮标发射管阵列 反潜无人机 中国海洋应用型彩虹-5无人机 具有合成孔径雷达吊舱和声呐浮标吊舱, 后续可配备磁探测仪, 最长飞行时间超18 h 美国MQ-9B反潜无人机 配备雷达和光电吊舱, 配备磁探仪和声呐浮标, 滞空时间超24 h 水面 水面舰艇 — 配备AN/SQR-19拖曳声呐, 测向精度<2°, 被动探测距离70 n mile 水下 核潜艇 美国Seawolf-class攻击核潜艇 配备有1×AN/BPS-16 I频平面搜索雷达、AN/BQQ-5D/E声呐系统 AUV 美国虎鲸XLUUV 载荷8000 kg, 可集成多种探测设备 水下滑翔机 美国Seaglider 可集成多种传感器, 额定负载下可航行7200 h  下载: 导出CSV
下载: 导出CSV
表 2 不同非声探测技术特点对比
Table 2. Comparison of characteristics of different non-acoustic detection technologies
探测技术 优势 劣势 磁异探测 精度较高, 不受海洋环境影响, 有效探测范围千米之内 对磁异常源分辨能力不足 雷达探测 灵敏度高, 精度高, 不受时间、气候影响 水下电磁波衰减严重, 只能用于水面和浅水探测 激光探测 定位精度高, 隐蔽性好, 受海洋环境影响小 作用距离有限, 水下探测有效距离在百米之内 红外探测 抗干扰能力强、实时性强 红外线属于电磁波, 水下有效作用范围几十米 电场探测 受气候和天气影响小, 隐蔽性好, 远近海域均适合 受海洋环境和噪声影响 重力梯度探测 抗干扰能力强、隐蔽性强、探测范围广 适合一定深度下的目标探测, 水面和浅水反而不适合 生物探测 水下发光生物分布范围广泛、延续时间长, 可探测性强 尚处于理论研究阶段, 没有成功应用
下载: 导出CSV
表 3 水下探测用UUV主要参数
Table 3. Main parameters of UUVs for underwater detection
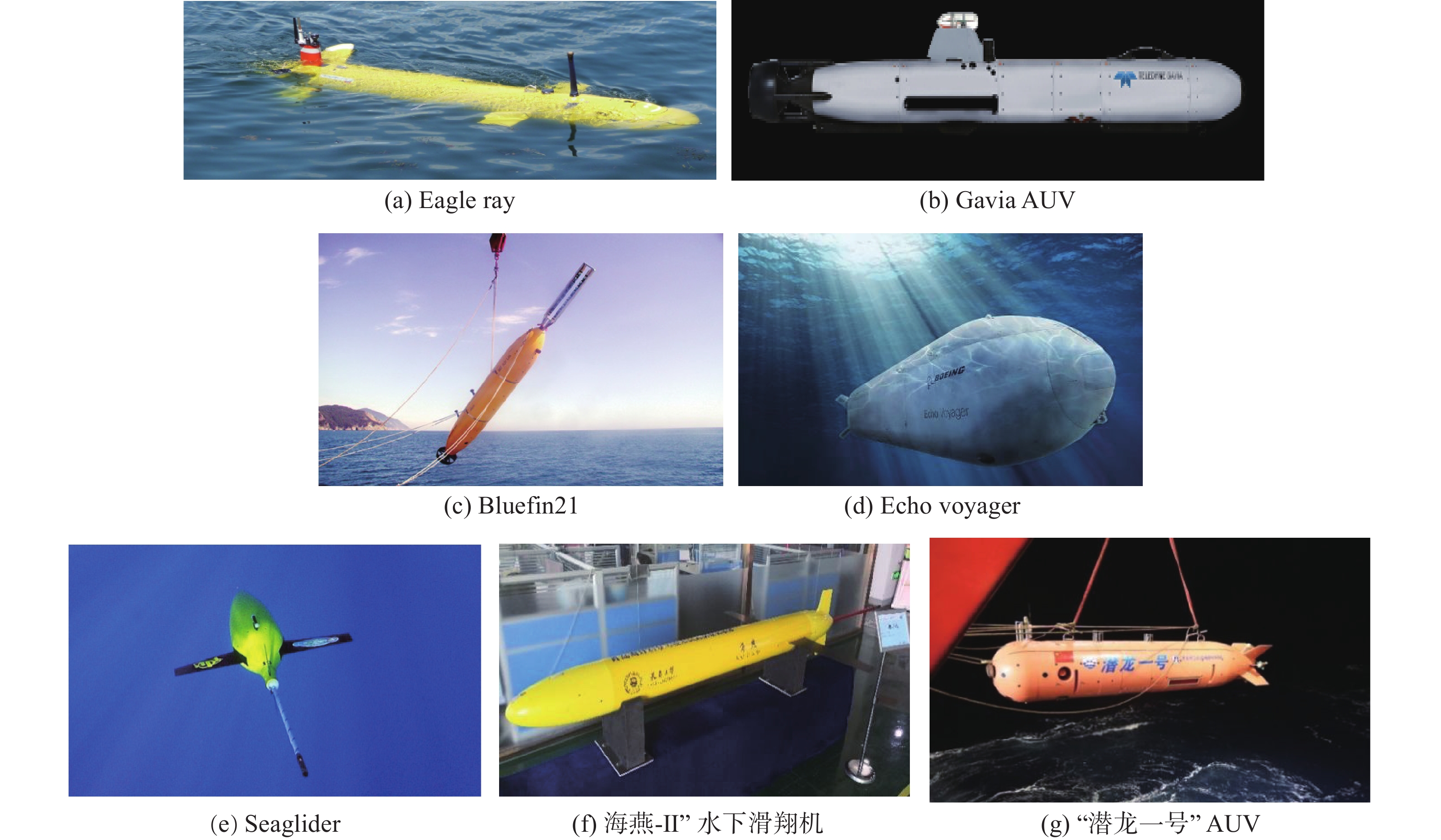
UUV 尺寸(长×宽×高)/m3 质量/kg 续航时间 潜深/m 负载 优势 Eagle Ray 4.50×0.69×0.69 630 22 h 3000 — — Bluefin21 4.93×0.53×0.80 750 25 h 4500 可携带侧扫声呐等 定位精度高 Echo Voyager 5.50×1.27×1.27 45360 — 3000 近8 t的负载 — Gavia Defence 1.80×0.20×0.20 48 7 h 1000 可装备侧扫声呐、剖面仪、相机 定位精度高 SOG Seagliders 1.80×0.30×0.30 52 7200 h 1000 — — “海燕-II”AUG 1.80×0.30×0.30 70 42 d 1500 可搭载CTD、水听器等 — “潜龙一号”AUV 4.60×0.80×0.80 1500 30 h 6000 可携带声呐、剖面仪、相机等 —
下载: 导出CSV
表 4 不同磁探测仪主要技术指标
Table 4. Main technical parameters of different magnetometers
磁探测仪 生产商 技术指标 MAD-XR 加拿大CAE 质量仅为1.5 kg, 探测范围约1200 m, 配有可以以横向和纵向分离的形式进行潜艇定位的软件 AN/ASQ-233 型激光氦光泵磁探仪 美国Polatomic 配有电子和激光组件的多轴换算器和重力梯度磁力计, 可自动磁补偿, 探测范围千米左右 MS3A型磁通门传感器 中船701研究所 分辨力0.2 nT, 灵敏度50 V/nT, 测量范围 −1×105~1×105 nT CS-3铯光泵磁力仪 加拿大Scintrex 灵敏度0.0006 nT/$\sqrt {{\text{Hz}}} $(rms), 测量范围15000~105000 nT Grad-13三轴数字梯度仪 英国Bartington 磁感应元件, 在1 Hz处噪声 <10 pT/$\sqrt {{\text{Hz}}} $ (rms) GFP703三维磁通门智能磁场变送器 德国Coliy DC基本精度 0.5%, 分辨率0.1 nT; AC基本精度1%, 频率响应范围DC~1 kHz。
下载: 导出CSV
表 5 不同电场传感器技术指标
Table 5. Technical parameters of different electric field sensors
电场传感器 生产商 技术指标 — 美国AIS D和M型适用于水下潜艇监测, D型可用直升机直接投放, 防腐蚀性强。 Ag/AgCl 电极传感器 英国Ultra 灵敏度小于2.5 nV/m, 测量范围1 mHz~3 kHz, 自噪声1 nV /m·Hz1/2 碳纤维电极传感器 瑞典Polyamp 灵敏度小于2 nV/m, 测量范围1 mHz~1.1 kHz, 系统噪声1 nV/Hz1/2 高精度电场传感器 英国Subspection 灵敏度1 nV/m, 测量范围:低频0.001~5 Hz, 高频0.5 Hz~1 kHz, 系统噪声1 nV/Hz1/2 微型电场传感器 英国Subspection 灵敏度0.1 nV/m, 测量范围1 mHz~1 kHz, 系统噪声2.5 nV/Hz1/2 SET-200/P 西班牙SEAS 测量范围: 低频0.005~10 Hz, 高频0.5 Hz~1 kHz, 系统噪声1 nV/Hz1/2
下载: 导出CSV
-
[1] Song R, Esmaiel H, Sun H, et al. Multi-submarines detection using multistatic sonar system[C]//2020 IEEE 5th Information Technology and Mechatronics Engineering Conference(ITOEC). Chongqing, China: IEEE, 2020. [2] 冯国新, 魏志强, 张茜. 美军探反潜作战装备发展趋势浅析[J]. 飞航导弹, 2017(6): 37-41. [3] 潘光, 宋保维, 黄桥高, 等. 水下无人系统发展现状及其关键技术[J]. 水下无人系统学报, 2017, 25(2): 44-51.Pan Guang, Song Baowei, Huang Qiaogao, et al. Development and key techniques of unmanned undersea system[J]. Journal of Unmanned Undersea Systems, 2017, 25(2): 44-51. [4] 肖玉洁, 邱志明, 石章松. UUV 国内外研究现状及若干关键问题综述[J]. 电光与控制, 2014, 21(2): 46-49.Xiao Yujie, Qiu Zhiming, Shi Zhangsong. On current research status of UUV and its critical technologies[J]. Electronics Optics & Control, 2014, 21(2): 46-49. [5] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.Shen Xinrui, Wang Yanhui, Yang Shaoqiong, et al. Development of underwater gliders: An overview and prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106. [6] The University of Southern Mississippi. Eagle Ray deep sea mapping AUV[EB/OL]. [2023-07-03]. https://www.usm.edu/hydrographic-science-research-center/2021eaglerayflyer.pdf. [7] General Dynamics. Bluefin-21[EB/OL]. (2021-05-01)[2023-07-03]. https://gdmissionsystems.com/-/media/general-dynamics/maritime-and-strategic-systems/bluefin/pdf/maritime-bluefin-21-uuv-datasheet.ashx. [8] Boeing. Echo Voyager[EB/OL]. (2017-04-22)[2023-07-03]. https://www.boeing.com/resources/boeingdotcom/defense/autonomous-systems/echo-voyager/echo_voyager_product_sheet.pdf. [9] Teledyne Marine. Gavia AUV[EB/OL]. (2023-02-08)[2023-07-03]. https://www.teledynemarine.com/en-us/products/SiteAssets/Gavia/Gavia%20AUV%20Data%20Sheet.pdf. [10] SOEST Ocean Gliders(SOG)[EB/OL]. (2023-05-29)[2023-08-02]. https://hahana.soest.hawaii.edu/seagliders/. [11] Eriksen C C, Osse T J, Light R D, et al. Seaglider: A long-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 424-436. doi: 10.1109/48.972073 [12] 陈正想, 胡光兰, 吕冰, 等. 磁通门传感器研究现状及其在海洋领域的应用[J]. 数字海洋与水下攻防, 2021, 4(1): 37-45. [13] 陶荣华, 王丹, 迟铖. 国外航空磁探潜装备应用分析及发展趋势[J]. 水下无人系统学报, 2021, 29(4): 369-373.Tao Ronghua, Wang Dan, Chi Cheng. Application analysis and development trend of foreign airborne magnetic anomaly detection equipment[J]. Journal of Unmanned Undersea Systems, 2021, 29(4): 369-373. [14] CAE. Magnetic anomaly detection extended role(MAD-XR)[EB/OL]. [2023-07-03]. https://www.cae.com/media/media-center/documents/datasheet.MAD-XR.pdf. [15] Slocum R E, Kuhlman G, Ryan L, et al. Polatomic advances in magnetic detection[C]//OCEANS’02 MTS/IEEE. Biloxi, MI, USA, 2002: 945-951. [16] 张朝阳, 刘济民, 杨林. 磁探潜关键技术现状及发展趋势[J]. 科学技术与工程, 2022, 22(1): 18-27.Zhang Chaoyang, Liu Jimin, Yang Lin. Situation and development trend of the key technology of magnetic submarine exploration[J]. Science Technology and Engineering, 2022, 22(1): 18-27. [17] 张扬, 黄卫东, 董长哲, 等. 海洋激光雷达探测卫星 技术发展研究[J]. 红外与激光工程, 2020, 49(11): 20-31.Zhang Yang, Huang Weidong, Dong Changzhe, et al. Research on the development of the detection satellite technology in oceanographic lidar[J]. Infrared and Laser Engineering, 2020, 49(11): 20-31. [18] 杨华勇, 梁永辉. 机载蓝绿激光水下目标探测技术的现状及前景[J]. 光机电信息, 2003(12): 6-10.Yang Huayong, Liang Yonghui. Present status and prospects of airborne blue-green laser for searching underwater objects[J]. OME Information, 2003(12): 6-10. [19] 崔国恒, 于德新. 非声探潜技术现状及其对抗措施[J]. 火力与指挥控制, 2007(12): 10-13.Cui Guoheng, Yu De-xin. Status quo of non-acoustics antisubmarine detecting technology and its countermeasures[J]. Fire Control & Command Control, 2007(12): 10-13. [20] Penny M F, Billard B, Abbot R H. LADS-the Australian laser airborne depth sounder[J]. Remote Sensing, 1989, 10(9): 1463-1479. [21] 马兰. 机载激光测深的技术装备[J]. 测绘技术装备, 2003(2): 39-42.Ma Lan. A review on airborne laser scanning technology for bathometric survey[J]. Geomatics Technology and Equipment, 2003(2): 39-42. [22] 胡善江, 贺岩, 陈卫标, 等. 机载双频激光雷达系统设计和研制[J]. 红外与激光工程, 2018, 47(9): 930001-1-930001-6.Hu Shanjiang, He Yan, Chen Weibiao, et al. Design of airborne dual-frequency laser radar system[J]. Infrared and Laser Engineering, 2018, 47(9): 930001-1-930001-6. [23] 吕德亮, 贺岩, 俞家勇, 等. 机载双频激光雷达结构误差与定位精度研究[J]. 激光与光电子学进展, 2018, 55(8): 48-55.Lü Deliang, He Yan, Yu Jiayong, et al. Research of error analysis and positioning accuracy of airborne dual-frequency lidar[J]. Laser & Optoelectronics Progress, 2018, 55(8): 48-55. [24] 程锦房, 张伽伟, 姜润翔, 等. 水下电磁异探测技术的发展现状[J]. 水雷战与舰船防护, 2019, 2(4): 45-49.Cheng Jinfang, Zhang Jiawei, Jiang Runxiang, et al. Development status of underwater electromagnetic detection technology[J]. Digital Ocean& Underwater Warfare, 2019, 2(4): 45-49. [25] 包中华. 基于水下电磁场的舰船目标远程探测方法研究[D]. 武汉: 海军工程大学, 2010: 4. [26] Slater M. Summary of commercial electromagnetic field sensors for the marine environment[R]. Oregon: Oregon Wave Energy Trust, 2010: 6-8. [27] Corporation polyamp. Underwater electric field sensors UEP/ELFE[EB/OL]. (2015-06-12)[2023-04-17]. http://www.polyamp.com. [28] Crona L, Fristedt T, Lundberg P. Field tests of a new type of graphite-fiber electrode for measuring motionally induced voltages[J]. Journal of Atmospheric and Oceanic Technology, 2001, 18(1): 92-99. doi: 10.1175/1520-0426(2001)018<0092:FTOANT>2.0.CO;2 [29] 王虎彪, 王勇, 许大欣, 等. 重力垂直梯度数据地图特征及其辅助导航[J]. 中国惯性技术学报, 20l0, 18(1): 93-96.Wang Hubiao, Wang Yong, Xu Daxin, et al. Data map characteristics of gravity vertical gradient and its aided inertial navigation analysis[J]. Journal of Chinese Inertial Technology, 20l0, 18(1): 93-96. [30] Hu M Z, Li J C, Li H, et a1. Bathymetry predicted from vertical gravity gradient anomalies and ship soundings[J]. Geodesy and Geodynamics, 2014, 88(1): 41-46. [31] 张志强, 郑晗, 崔银锋. 航空重力垂直梯度探测潜艇方法研究[J]. 海洋测绘, 2019, 39(4): 6-9, 13.Zhang Zhiqiang, Zheng Han, Cui Yinfeng. Research on the submarine detection method based on the airborne gravity vertical gradient[J]. Hydrographic Surveying and Charting, 2019, 39(4): 6-9, 13. [32] 陈允锋, 刘伟. 非声探潜新技术浅析[J]. 光纤与电缆及其应用技术, 2016(6): 29-32.Chen Yunfeng, Liu Wei. Brief analysis of new non-acoustic submarine detecting technologies[J]. Optical Fiber & Electric Cable and Their Applications, 2016(6): 29-32. [33] 闫足. 基于重力梯度的潜艇威胁目标探测方法研究[D]. 武汉: 华中科技大学, 2015. [34] Murphy C A. The Air-FTGTM airborne gravity gradiometer system[C]//ASEG-PESA Airborne Gravity 2004 Workshop. [S.l.]: Geoscience Australia Record, 2004(18): 7-14. [35] Dransfield M, Lee J B. The FALCON airborne gravity gradiometer survey systems[C]//ASEG-PESA Airborne Gravity 2004 Workshop. [S.l.]: Geoscience Australia Record, 2004(18) : 15-20. [36] 谢泉松, 蔡广友. “形形色色”的新型探潜技术[J]. 国防科技, 2015, 36(6): 54-57. [37] 武志星. 五个研究团队助力DARPA“持续性海洋生物传感器”项目[J]. 科技中国, 2019(3): 1. [38] 宋保维, 潘光, 张立川, 等. 自主水下航行器发展趋势及关键技术[J]. 中国舰船研究, 2022, 17(5): 27-44.Song Baowei, Pan Guang, Zhang Lichuan, et al. Development trend and key technologies of autonomous underwater vehicles[J]. Chinese Journal of Ship Research, 2022, 17(5): 27-44. [39] 邱志明, 马焱, 孟祥尧, 等. 水下无人装备前沿发展趋势与关键技术分析[J]. 水下无人系统学报, 2023, 31(1): 1-9.Qiu Zhiming, Ma Yan, Meng Xiangyao, et al. Analysis on the development trend and key technologies of unmanned underwater equipment[J]. Journal of Unmanned Undersea Systems, 2023, 31(1): 1-9. [40] Huy D Q, Sadjoli N, Azam A B, et al. Object perception in underwater environments: A survey on sensors and sensing methodologies[J]. Ocean Engineering, 2023, 267: 113202. doi: 10.1016/j.oceaneng.2022.113202 [41] 吴天元, 江丽霞, 崔光磊. 水下观测和探测装备能源供给技术现状与发展趋势[J]. 中国科学院院刊, 2022, 37(7): 898-909.Wu Tianyuan, Jiang Lixia, Cui Guanglei. Status and trends of energy power supply technologyies for underwater equipment[J]. Bulletin of Chinese Academy of Sciences, 2022, 37(7): 898-909. -






 点击查看大图
点击查看大图

计量
- 文章访问数: 478
- HTML全文浏览量: 59
- PDF下载量: 185
- 被引次数: 0




