

Progress of AUV Intelligent Swarm Collaborative Task
-
摘要: 随着智能集群技术的发展和日渐成熟, 自主水下航行器(AUV)以集群的形式互相协作执行任务成为了未来水下任务发展的必然趋势。由于水下环境的特殊性, 水下多航行器集群协同任务面临巨大挑战。论文概述了国内外AUV智能集群协同任务的相关研究进展。从集群围捕、路径规划、编队控制等角度, 系统性阐述了AUV智能集群多种任务及其关键技术的国内外发展现状, 同时介绍了作者团队近年来开展AUV集群协同围捕和水下多路径规划等研究工作。通过对现有研究成果的总结与分析, 为探索和规划水下多航行器集群协同任务的发展方向提供了参考。Abstract: With developments in the intelligent swarm technology, the cooperation of autonomous undersea vehicle (AUV) swarms in performing underwater tasks has become an inevitable trend for the future development of such tasks. However, owing to the particularity of underwater environments, collaborative tasks of underwater multi-vehicle swarms encounter major challenges. This paper provides an overview of the research progress on AUV swarms. From the perspective of cooperative hunting, path planning, formation control, and so on, multiple tasks and key technologies of intelligent swarms developed worldwide are introduced, and some recent results obtained by the authors based on cooperative hunting and multi-path underwater planning tasks are summarized. Additionally, through a review and analysis of existing research results, some references for the future development of underwater multi-vehicle swarm tasks are provided.
-
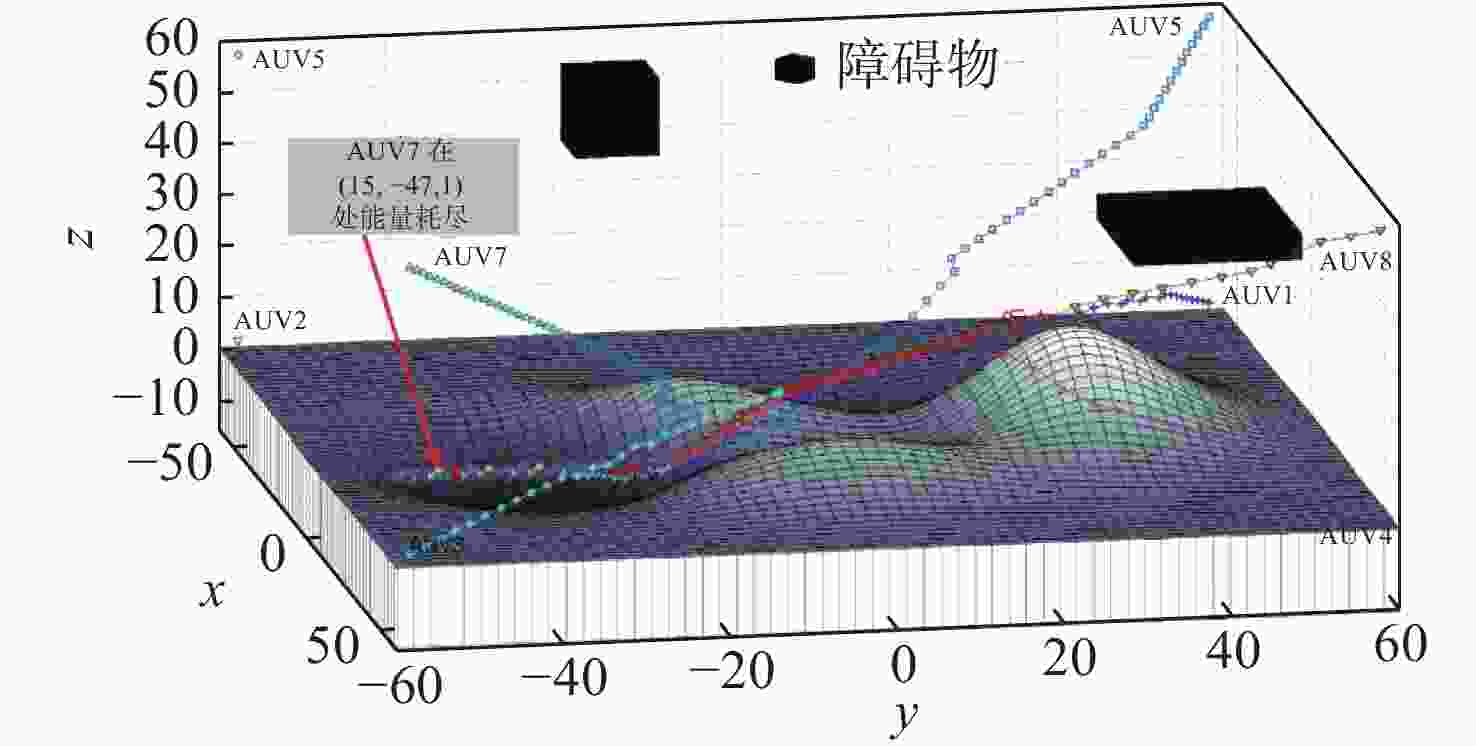
图 1 动态水下环境中非均匀多AUV集群围捕示意图
Figure 1. Diagram of inhomogeneous multiple AUVs cooperative hunting in dynamic underwater environment
-
[1] Kot R. Review of collision avoidance and path planning algorithms used in autonomous underwater vehicles[J]. Electronics, 2022, 11(15): 2301. doi: 10.3390/electronics11152301 [2] Guo Y, Liu H, Fan X, et al. Research progress of path planning methods for autonomous underwater vehicle[J]. Mathematical Problems in Engineering, 2021, 2021: 8847863. [3] Hadi B, Khosravi A, Sarhadi P. A review of the path planning and formation control for multiple autonomous underwater vehicles[J]. Journal of Intelligent & Robotic Systems, 2021, 101(4): 67. [4] An R, Guo S, Zheng L, et al. Uncertain moving obstacles avoiding method in 3D arbitrary path planning for a spherical underwater robot[J]. Robotics and Autonomous Systems, 2022, 151: 104011. doi: 10.1016/j.robot.2021.104011 [5] Wang X, Deng Y, Duan H. Edge-based target detection for unmanned aerial vehicles using competitive bird swarm algorithm[J]. Aerospace Science and Technology, 2018, 78: 708-720. doi: 10.1016/j.ast.2018.04.047 [6] Zhang Z, Yang T, Zhang T, et al. Global vision-based formation control of soft robotic fish swarm[J]. Soft Robot, 2020, 8: 310-318. [7] Andreychuk A, Yakovlev K, Surynek P, et al. Multi-agent pathfinding with continuous time[J]. Artificial Intelligence, 2022, 305: 103662. doi: 10.1016/j.artint.2022.103662 [8] Ni J, Yang L, Shi P, et al. An improved DSA-based approach for multi-AUV cooperative search[J]. Computational Intelligence and Neuroscience, 2018, 2018: 2186574. [9] Yu D, Chen P C. Smooth transition in communication for swarm control with formation change[J]. IEEE Transactions on Industrial Informatics, 2020, 16: 6962-71. doi: 10.1109/TII.2020.2971356 [10] Ebel H, Luo W, Yu F, et al. Design and experimental validation of a distributed cooperative transportation scheme[J]. IEEE Transactions on Automation Science and Engineering, 2020, 18: 1157-69. [11] Yu J, Dong X, Li Q, et al. Distributed cooperative encirclement hunting guidance for multiple flight vehicles system[J]. Aerospace Science and Technology, 2019, 95: 105475. doi: 10.1016/j.ast.2019.105475 [12] Huang Z, Zhu D, Sun B. A multi-AUV cooperative hunting method in 3-D underwater environment with obstacle[J]. Engineering Applications of Artificial Intelligence, 2016, 50: 192-200. doi: 10.1016/j.engappai.2016.01.036 [13] Cao X, Sun H, Jan G E. Multi-AUV cooperative target search and tracking in unknown underwater environment[J]. Ocean Engineering, 2018, 150: 1-11. doi: 10.1016/j.oceaneng.2017.12.037 [14] Zhu D, Tian B. Complete coverage path planning of autonomous underwater vehicle based on GBNN algorithm[J]. Journal of Intelligent & Robotic Systems, 2019, 94: 237-249. [15] Ni J, Yang L, Wu L, et al. An improved spinal neural system-based approach for heterogeneous AUVs cooperative hunting[J]. International Journal of Fuzzy Systems, 2017, 20: 672-686. [16] Cao X, Xu X. Hunting algorithm for multi-AUV based on dynamic prediction of target trajectory in 3D underwater environment[J]. IEEE Access, 2020, 8: 138529-38. doi: 10.1109/ACCESS.2020.3013032 [17] Cai L, Sun Q. Multi-autonomous underwater vehicle consistent collaborative hunting method based on generative adversarial network[J]. International Journal of Advanced Robotic Systems, 2020, 17: 663-678. [18] Liang H, Fu Y, Kang F, et al. A behavior-driven coordination control framework for target hunting by UUV intelligent swarm[J]. IEEE Access, 2020, 8: 4838-59. [19] Chen M, Zhu D. A novel cooperative hunting algorithm for inhomogeneous multiple autonomous underwater vehicles[J]. IEEE Access, 2018, 6: 7818-28. doi: 10.1109/ACCESS.2018.2801857 [20] 朱心科, 侯斐, 孟肯, 等. 较强海流中的低速水下机器人路径优化[J]. 海洋技术学报, 2021, 40(6): 54-60. doi: 10.3969/j.issn.1003-2029.2021.06.008Zhu Xinke, Hou Fei, Meng Ken, et al. The path plan for the low speed autonomous underwater vehicle in stronger ocean current[J]. Journal of Ocean Technology, 2021, 40(6): 54-60. doi: 10.3969/j.issn.1003-2029.2021.06.008 [21] 付乐乐, 陈宏, 巩伟杰. 基于改进蚁群算法的水下机器人路径规划[J]. 自动化与仪表, 2022, 37(4): 46-50.Fu Lele, Chen Hong, Gong Weijie. Path planning of underwater robot based on improved ant colony algorithm[J]. Automation & Instrumentation, 2022, 37(4): 46-50. [22] 刘兴盛, 王俊雄. 基于改进蚁群算法的水下机器人路径规划算法[J]. 舰船科学技术, 2022, 44(21): 80-87. doi: 10.3404/j.issn.1672-7649.2022.21.017Liu Xingsheng, Wang Junxiong. Research on path planning algorithm for underwater robots based on improved ant colony algorithm[J]. Ship Science and Technology, 2022, 44(21): 80-87. doi: 10.3404/j.issn.1672-7649.2022.21.017 [23] 赵苗, 高永琪, 吴笛霄, 等. 复杂海战场环境下AUV全局路径规划方法[J]. 国防科技大学学报, 2021, 43(1): 41-48. doi: 10.11887/j.cn.202101006Zhao Miao, Gao Yongqi, Wu Dixiao, et al. AUV global path planning method in complex sea battle field environment[J]. Journal of National University of Defense Technology, 2021, 43(1): 41-48. doi: 10.11887/j.cn.202101006 [24] 谢新连, 刘超, 魏照坤. 海洋气象环境影响下的复杂水域船舶路径规划[J]. 重庆交通大学学报(自然科学版), 2021, 40(2): 8.Xie Xinlian, Liu Chao, Wei Zhaokun. Ship path planning in complex water areas under the influence of marine meteorological environment[J]. Journal of Chongqing Jiaotong University (Natural Sciences), 2021, 40(2): 8. [25] Dijkstra E W. A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1(1): 269-271. doi: 10.1007/BF01386390 [26] Lee C Y. An algorithm for path connections and its applications[J]. IRE Transactions on Electronic Computers, 1961, EC-10(3): 346-365. doi: 10.1109/TEC.1961.5219222 [27] 马小轩, 吴韵哲, 吴浩峻, 等. 基于改进人工势场法的水下自主航行器路径规划[J]. 船舶工程, 2021, 43(9): 89-93. doi: 10.13788/j.cnki.cbgc.2021.09.16Ma Xiaoxuan, Wu Yunzhe, Wu Haojun, et al. Path planning of autonomous underwater vehicle based on improved artificial potential field method[J]. Ship Engineering, 2021, 43(9): 89-93. doi: 10.13788/j.cnki.cbgc.2021.09.16 [28] 周兰凤, 孔明月. 基于改进人工势场法的无人机三维避障[J]. 华东师范大学学报(自然科学版), 2022(6): 54-67.Zhou Lanfeng, Kong Mingyue. 3D obstacle-avoidance for a unmanned aerial vehicle based on the improved artificial potential field method[J]. Journal of East China Normal University(Natural Science), 2022(6): 54-67. [29] Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science & Cybernetics, 1972, 4(2): 28-29. [30] Koenig S, Likhachev M, Furcy D. Lifelong planning A*[J]. Artificial Intelligence, 2004, 155(1): 93-146. [31] Bing S, Zhu D. Three dimensional D*Lite path planning for autonomous underwater vehicle under partly unknown environment[C]//Intelligent Control & Automation. Guilin, China: IEEE, 2016. [32] 蒋林, 方东君, 周和文, 等. 基于射线模型的改进全局路径规划算法[J]. 电子学报, 2022, 50(3): 548-556.Jiang Lin, Fang Dongjun, Zhou Hewen, et al. Improved global path planning algorithm based on ray model[J]. Acta Electronica Sinica, 2022, 50(3): 548-556. [33] Dolgov D, Thrun S, Montemerlo M, et al. Practical Search Techniques in Path Planning for Autonomous Driving[EB/OL]. [2023-02-01]. https://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=9620D1EC370CA180A26E1EE1BEFD91E8?doi=10.1.1.165.6008&rep=rep1&type=pdf. [34] LaValle S M. Rapidly-exploring random trees: A new tool for path planning[R]. Ames, USA: Iowa State University, 1998. [35] Kavraki L E, Svestka P, Latombe J C, et al. Probabilistic roadmaps for path planning in high-dimensional configuration spaces[J]. IEEE Transactions on Robotics & Automation, 1996, 12(4): 566-580. [36] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. doi: 10.1177/0278364911406761 [37] 张一帆, 史国友, 徐家晨. 基于人工势场法引导的Bi-RRT的水面无人艇路径规划算法[J]. 上海海事大学学报, 2022, 43(4): 16-22.Zhang Yifan, Shi Guoyou, Xu Jiachen. Path planning algorithm of unmanned surface vehicles based on Bi-RRT guided by artificial potential field[J]. Journal of Shanghai Maritime University, 2022, 43(4): 16-22. [38] Chen L, Shan Y, Tian W, et al. A fast and efficient double-tree rrt*-like sampling-based planner applying on mobile robotic systems[J]. IEEE/ASME transactions on mechatronics, 2018, 23(6): 2568-2578. doi: 10.1109/TMECH.2018.2821767 [39] Chandler B, Goodrich M A. Online RRT and online FMT: rapid replanning with dynamic cost[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, BC, Canada: IEEE, 2017. [40] Holland J H. Adaptation in natural and artificial systems[R]. Ann Arbor: University of Michigan, 1995. [41] 张美燕, 蔡文郁. 基于多AUV间任务协作的水下多目标探测路径规划[J]. 传感技术学报, 2018, 31(7): 1101-07. doi: 10.3969/j.issn.1004-1699.2018.07.021Zhang Meiyan, Cai Wenyu. Underwater targets tracking path planning based on task cooperation of multiple AUVs[J]. Chinese Journal of Sensors and Actuators, 2018, 31(7): 1101-07. doi: 10.3969/j.issn.1004-1699.2018.07.021 [42] Kapanoglu M, Alikalfa M, Ozkan M, et al. A pattern-based genetic algorithm for multi-robot coverage path planning minimizing completion time[J]. Journal of Intelligent Manufacturing, 2012, 23(4): 1035-45. doi: 10.1007/s10845-010-0404-5 [43] Eberhart R, Kennedy J. A new optimizer using particle swarm theory[C]// Mhs95 Sixth International Symposium on Micro Machine & Human Science. Nagoya, Japan: IEEE, 2002. [44] 郭兴海, 计明军, 张卫丹. 可变洋流环境中自主水下航行器动态路径规划的改进QPSO算法[J]. 系统工程理论与实践, 2021, 41(8): 2112-24. doi: 10.12011/SETP2019-0647Guo Xinghai, Ji Mingjun, Zhang Weidan. Improved QPSO algorithm for dynamic path planning of autonomous underwater vehicles in variable ocean current environment[J]. Systems Engineering-Theory & Practice, 2021, 41(8): 2112-24. doi: 10.12011/SETP2019-0647 [45] 邹佳运, 曲泓玥, 陈志鹏. 大规模水下滑翔机集群区域覆盖探测路径规划[J]. 水下无人系统学报, 2021, 29(1): 23-29. doi: 10.11993/j.issn.2096-3920.2021.01.04Zou Jiayun, Qu Hongyue, Chen Zhipeng. Path planning of a large-scale underwater glider swarm area coverage detection[J]. Journal of Unmanned Undersea Systems, 2021, 29(1): 23-29. doi: 10.11993/j.issn.2096-3920.2021.01.04 [46] 王浩亮, 卢丽宇, 王丹, 等. 多圆碟形水下滑翔机的双层协调三维路径规划[J]. 控制理论与应用, 2022, 39: 1-8. doi: 10.7641/CTA.2021.10082Wang Haoliang, Lu Liyu, Wang Dan, et al. Double-layer coordinated three-dimensional path planning for multiple saucer-type autonomous underwater gliders[J]. Control Theory & Applications, 2022, 39: 1-8. doi: 10.7641/CTA.2021.10082 [47] Wang P. Navigation strategies for multiple autonomous robots moving in formation[C]//Proceedings of IEEE/RSJ International Workshop on Intelligent Robots and Systems. Tsukuba, Japan: IEEE, 1989. [48] 赖云晖, 李瑞, 史莹晶, 等. 基于图论法的四旋翼三角形结构编队控制[J]. 控制理论与应用, 2018, 35(10): 1530-37. doi: 10.7641/CTA.2018.80065Lai Yunhui, Li Rui, Shi Yingjing, et al. On the study of multi-quadrotor formation control with triangular structure based on Graph theory[J]. Control Theory & Applications, 2018, 35(10): 1530-37. doi: 10.7641/CTA.2018.80065 [49] Yan Z, Liu Y, Zhou J, et al. Moving target following control of multi-AUVs formation based on rigid virtual leader-follower under ocean current[C]//2015 34th Chinese Control Conference (CCC). Hangzhou, China: IEEE, 2015. [50] Lewis M A, Tan K H. High precision formation control of mobile robots using virtual structures[J]. Autonomous Robots, 1997, 4(4): 387-403. doi: 10.1023/A:1008814708459 [51] Cervantes J, Wen Y, Sergio S, et al. Output based backstepping control for trajectory tracking of an autonomous underwater vehicle[C]//2016 American Control Conference (ACC). Boston, MA, USA: IEEE, 2016. [52] 潘无为, 姜大鹏, 庞永杰, 等. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2): 9. doi: 10.3969/j.issn.1000-1093.2017.02.017Pan Wuwei, Jiang Dapeng, Pang Yongjie, et al. A multi-AUV formation algorithm combining artificial potential field and virtual structure[J]. Arta Armamentarii, 2017, 38(2): 9. doi: 10.3969/j.issn.1000-1093.2017.02.017 [53] Hacene N, Mendil B. Behavior-based autonomous navigation and formation control of mobile robots in unknown cluttered dynamic environments with dynamic target tracking[J]. Int. J. Autom. Comput., 2021, 18: 766-786. doi: 10.1007/s11633-020-1264-x [54] Kang X D, Xu H L, Feng X S. Fuzzy logic based behavior fusion for multi-AUV formation keeping in uncertain ocean environment[C]//Oceans 2009. Biloxi, MS, USA: IEEE, 2009. [55] Zhao Z, Hu Q, Feng H, et al. A cooperative hunting method for multi-AUV swarm in underwater weak information environment with obstacles[J]. Journal of Marine Science and Engineering, 2022, 10(9): 1266. doi: 10.3390/jmse10091266 [56] 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7): 2251-62. doi: 10.12305/j.issn.1001-506X.2022.07.21Feng Haobo, Hu Qiao, Zhao Zhenyi. AUV swarm path planning based on elite family genetic algorithm[J]. Systems Engineering and Electronics, 2022, 44(7): 2251-62. doi: 10.12305/j.issn.1001-506X.2022.07.21 [57] 冯豪博. 自主式水下航行器集群动态路径规划及编队运动控制研究[D]. 西安: 西安交通大学, 2023. -

 下载:
下载:

 点击查看大图
点击查看大图
图(8)
计量
- 文章访问数: 241
- HTML全文浏览量: 39
- PDF下载量: 123
- 被引次数: 0




