

DVL-based Autonomous Navigation Method for Unmanned Undersea Vehicles
-
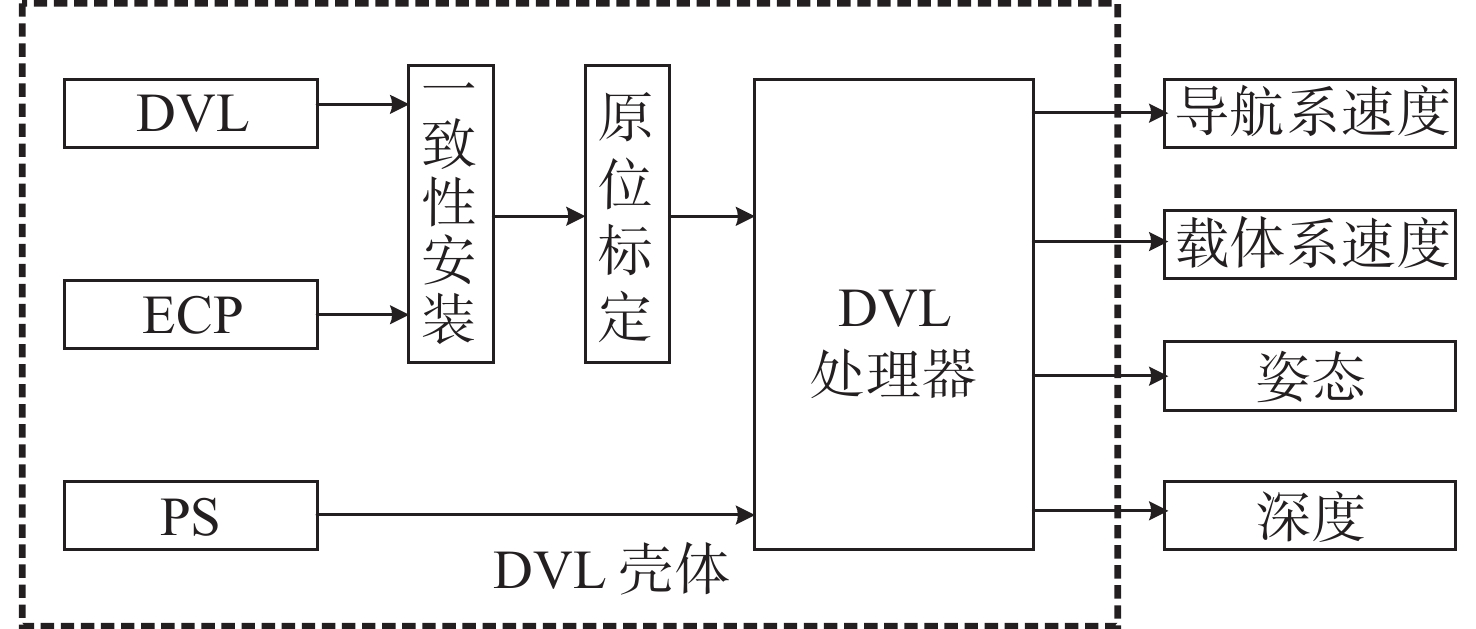
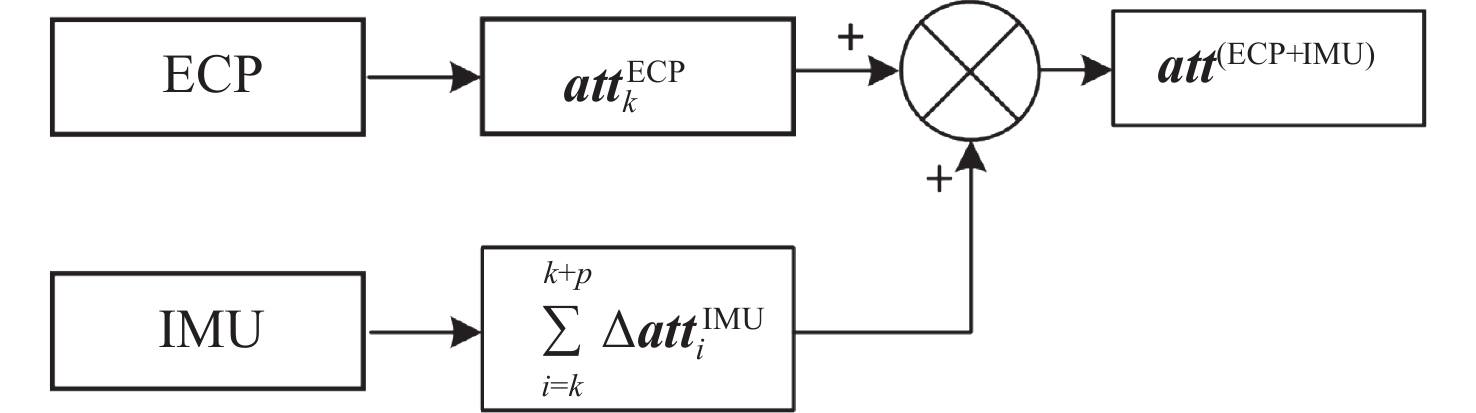
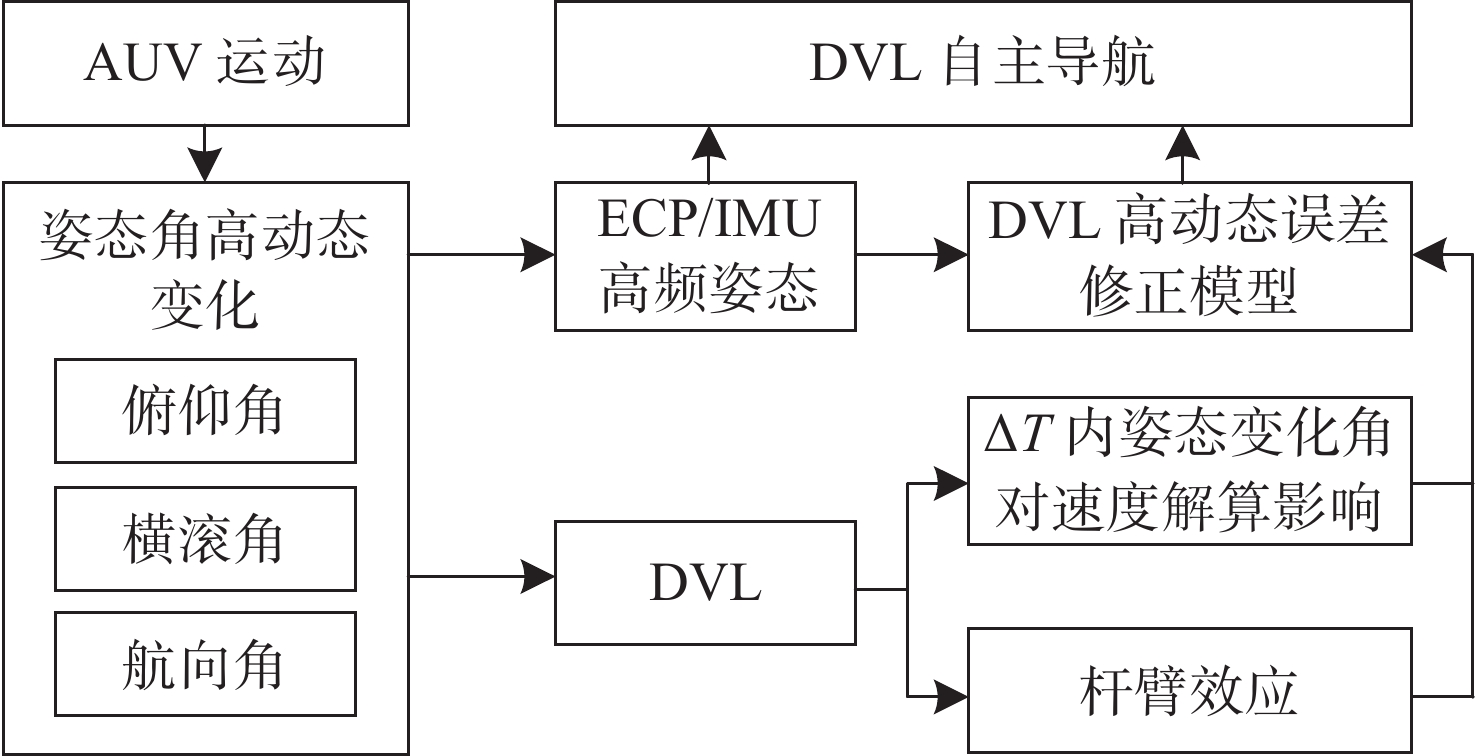
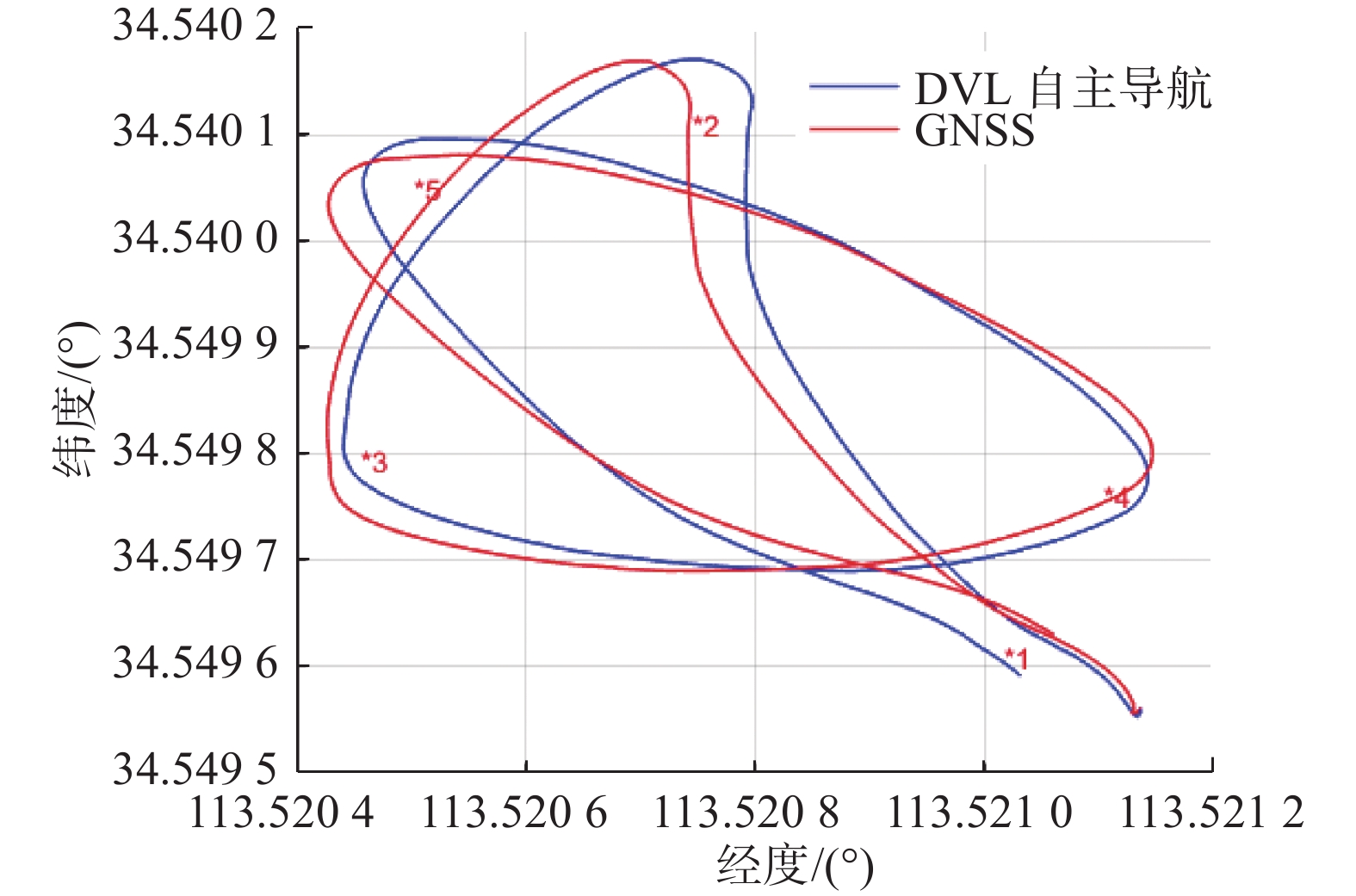
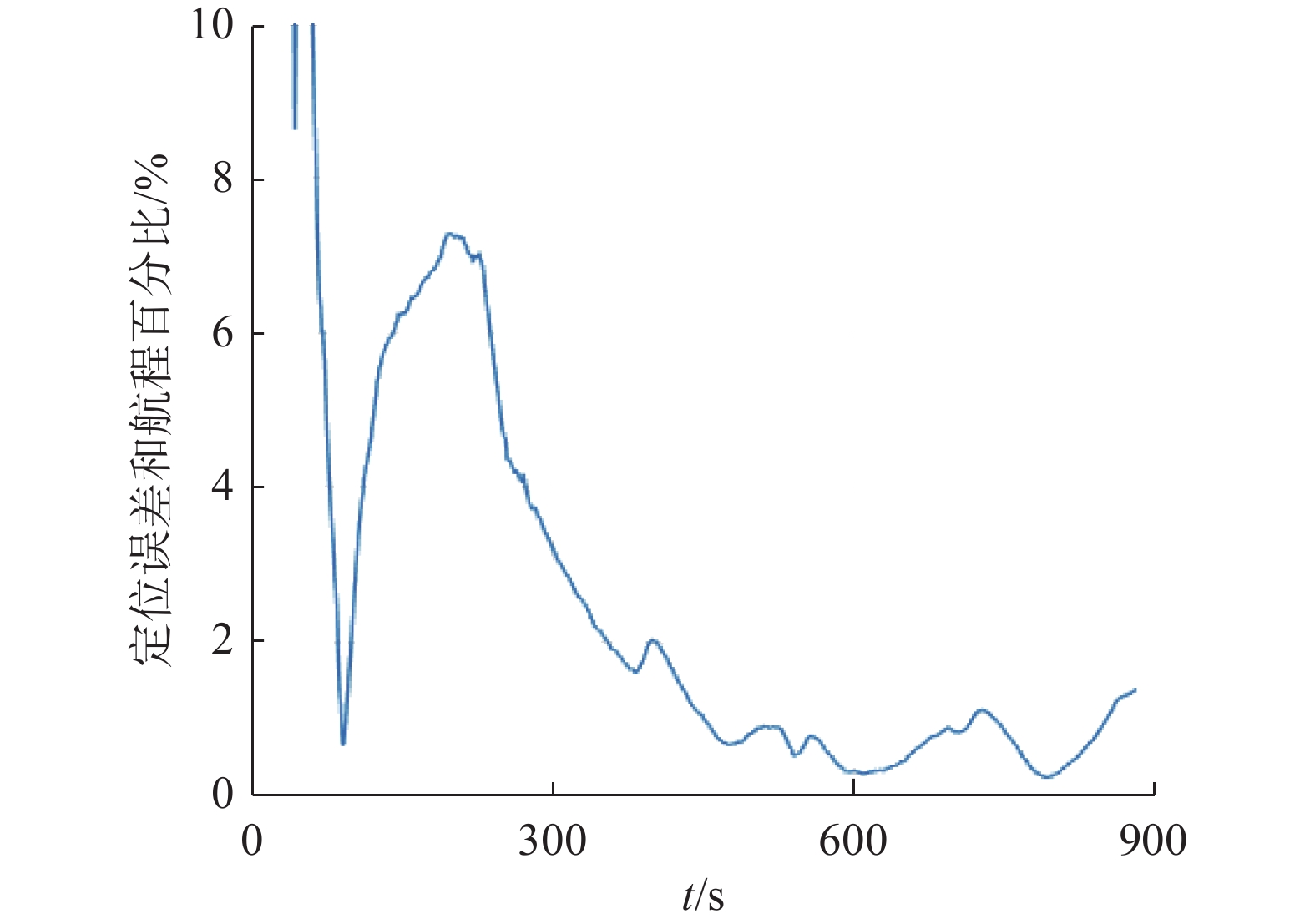
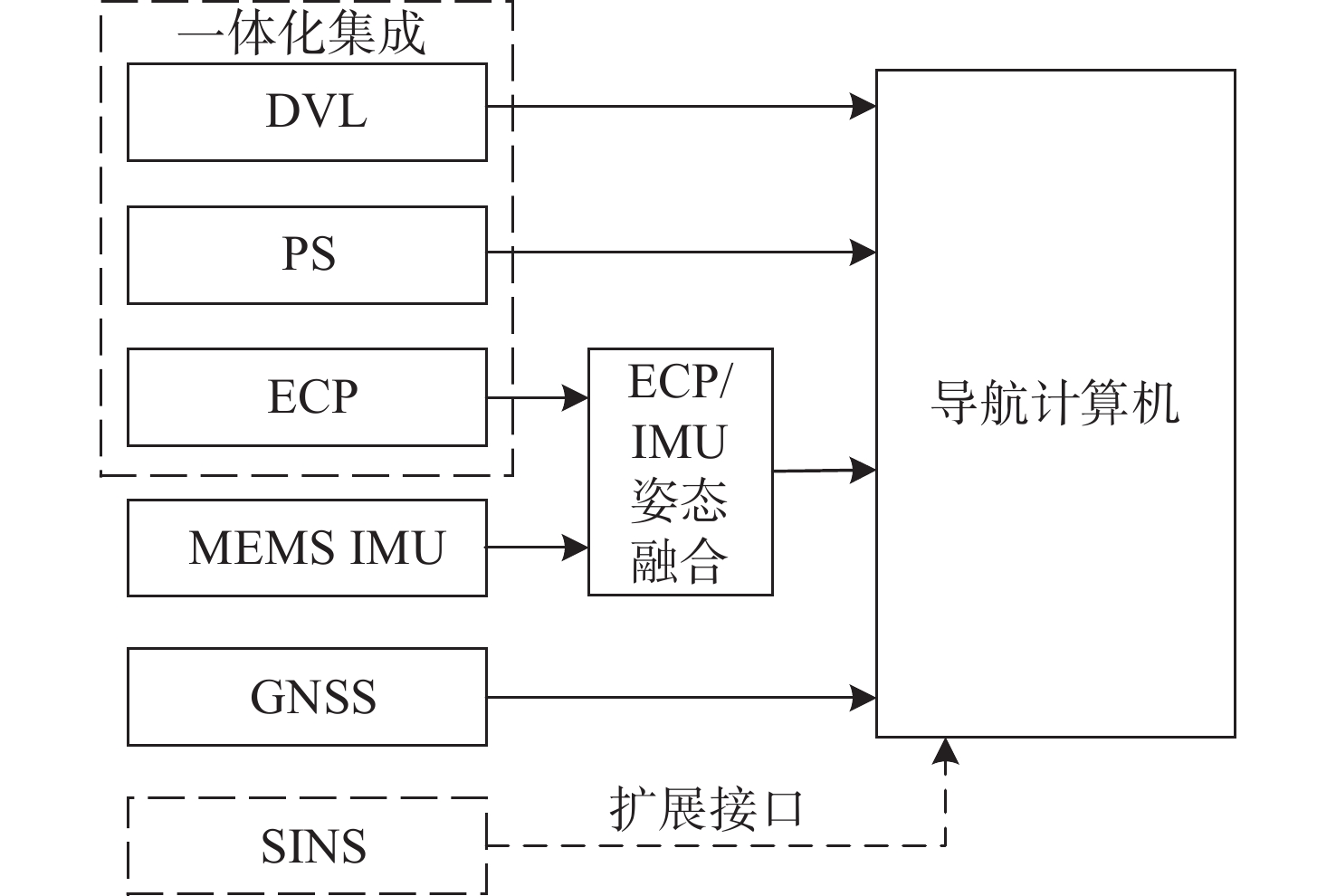
摘要: 针对无人水下航行器自主导航需求, 文中设计由多普勒计程仪(DVL)、深度计、电子罗盘(ECP)和低成本惯性量测单元(IMU)组成的航位推算导航系统, 提出一种DVL自主导航方法。该方法通过传感器一体化集成克服安装误差和时间异步问题, 采用ECP/IMU融合方案获取高频姿态参数, 在此基础上, 制定DVL异常数据处理、高动态误差修正以及全球导航卫星系统辅助策略。所提出的方法在“海为一号”自主水下航行器上得到应用, 试验结果表明自主导航定位精度约为航程的1.5%(圆概率误差), 可以为相关研究和应用提供参考。Abstract: In response to the requirement for autonomous navigation capability of unmanned undersea vehicles, a dead-reckoning navigation system composed of a Doppler velocity log(DVL), a pressure sensor, an electronic compass(ECP), and a low-cost inertial measurement unit(IMU) is designed in this study, and a DVL-based autonomous navigation method is developed. In the proposed method, a sensor integration scheme is implemented to overcome the installation error and time asynchrony. An ECP/IMU fusion scheme is developed for high-frequency attitude parameters. On this basis, the strategies for the elimination of DVL abnormal data, the correction of DVL high dynamic errors and the assistance of global navigation satellite system are formulated. The proposed method is applied on the “Haiwei 1” autonomous undersea vehicle(AUV). The filed experiments of “Haiwei 1” AUV indicate that the positioning accuracy of the autonomous navigation corresponds to approximately 1.5%(circular error probable) of the distance traveled, which can serve as a reference for related researches and applications.
-
Key words:
- unmanned undersea vehicle /
- autonomous navigation /
- dead-reckoning /
- DVL-based navigation
-

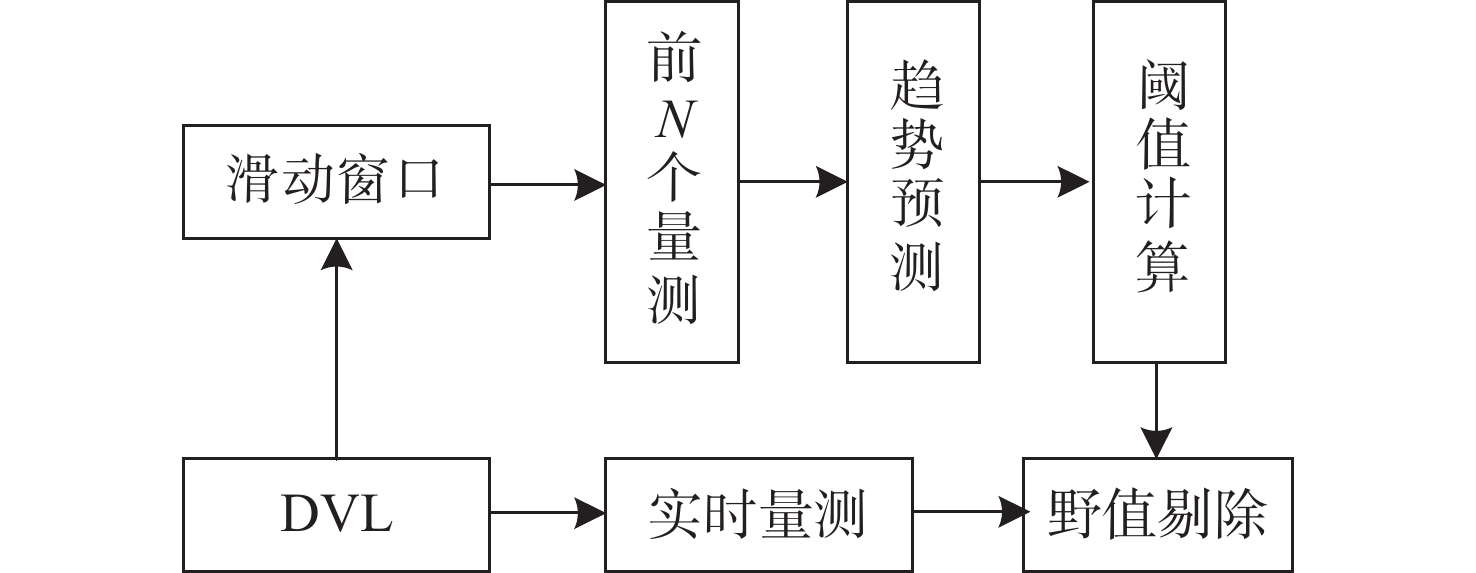
图 6 基于趋势预测的野值剔除方案
Figure 6. The outlier elimination strategy based on trend prediction

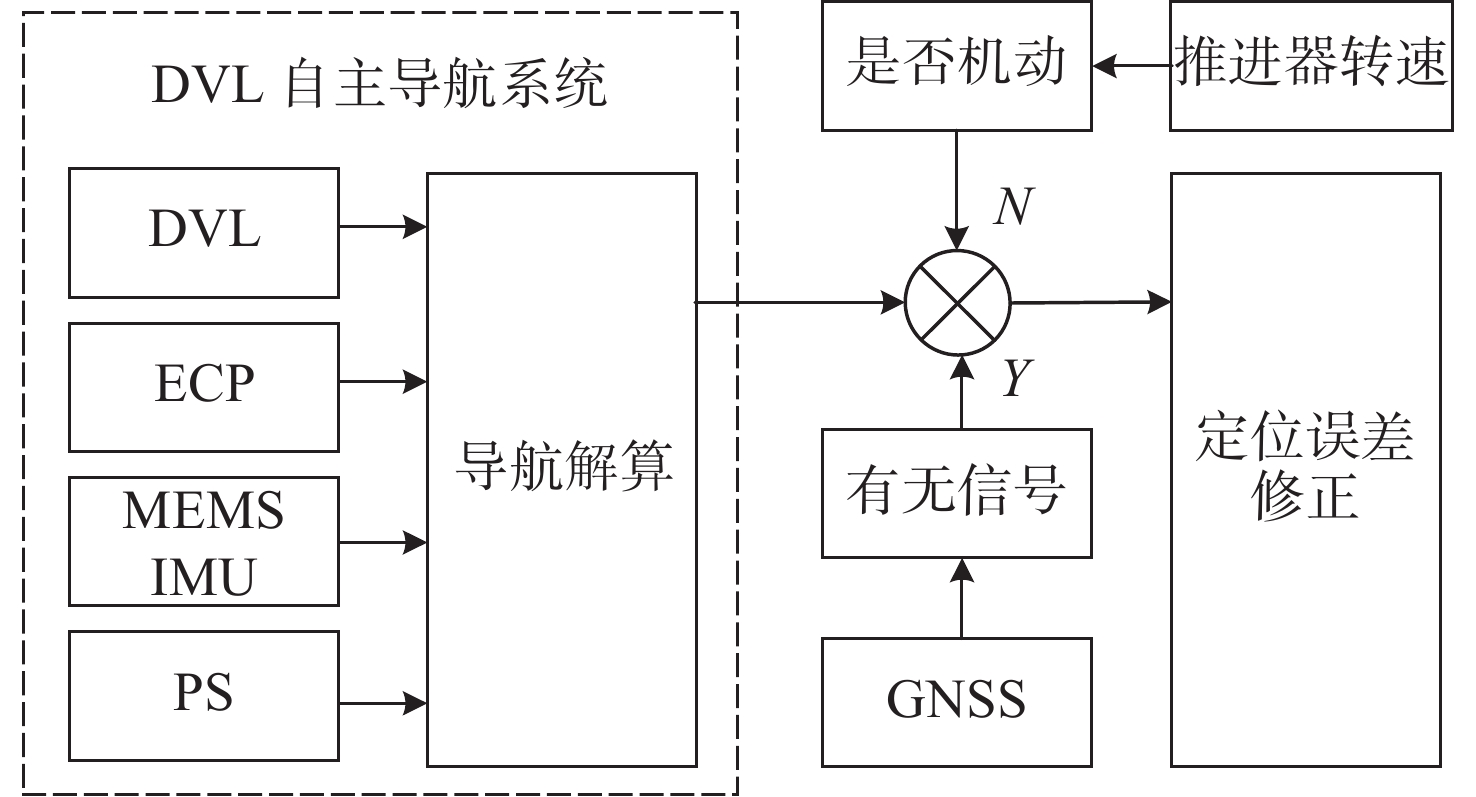
图 8 基于推进器转速反馈的GNSS辅助导航策略
Figure 8. GNSS-assisted navigation strategy based on propeller speed feedback
表 1 传感器型号和参数
Table 1. Sensor types and parameters
设备名称 厂家和型号 主要性能参数 导航计算机 北京盛博PC104 主频1.6 GHz DVL RTI SeaPILOT 600 kHz ±0.25%±2 mm/s ECP DVL内部集成 1°(RMS) PS DVL内部集成 1% F.S. MEMS IMU 西安精准测控GS01 水平0.3°(RMS)
航向1°(RMS)GNSS 中海达BX381 单点精度1.5 m(1σ)  下载: 导出CSV
下载: 导出CSV
表 2 试验结果统计
Table 2. The statistics table of experiment results
定位精度 试验次数 <1% D.T. 3 1~1.5% D.T. 4 1.5~3% D.T. 3 3~4% D.T. 1 4~5% D.T. 3
下载: 导出CSV
-
[1] 姚金艺, 曾庆军, 周启润, 等. 全驱动AUV系统路径跟踪设计与实现[J]. 水下无人系统学报, 2019, 27(4): 452-58.Yao Jinyi, Zeng Qingjun, Zhou Qirun et al. Design and Implementation of a path tracking system for a fully actuated AUV[J]. Journal of Unmanned Undersea Systems, 2019, 27(4): 452-58. [2] 周启润, 曾庆军, 姚金艺, 等. 全驱动AUV动力定位系统设计与实现[J]. 水下无人系统学报, 2019, 27(3): 333-38.Zhou Qirun, Zeng Qingjun, Yao Jinyi, et al. Design and implementation of dynamic positioning system for a fully actuated AUV[J]. Journal of Unmanned Undersea Systems, 2019, 27(3): 333-38. [3] Santoso F, Garratt M A, Anavatti S G. State-of-the-art integrated guidance and control systems in unmanned vehicles: A review[J]. IEEE Systems Journal, 2021, 15(3): 3312-23. doi: 10.1109/JSYST.2020.3007428 [4] Harris Z J, Whitcomb L L. Cooperative acoustic navigation of underwater vehicles without a DVL utilizing a dynamic process model: Theory and field evaluation[J]. Journal of Field Robotics, 2021, 38(5): 700-26. doi: 10.1002/rob.22008 [5] Guo J, Li D Y, He B. Intelligent collaborative navigation and control for AUV tracking[J]. IEEE Transactions on Industrial Informatics, 2021, 17(3): 1732-41. doi: 10.1109/TII.2020.2994586 [6] Kepper J H, Claus B C, Kinsey J C, et al. A navigation solution using a MEMS IMU, model-based dead-reckoning, and one-way-travel-time acoustic range measurements for autonomous underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 2019, 44(3): 664-82. doi: 10.1109/JOE.2018.2832878 [7] Wang D, Xu X X, Yang Y, et al. A quasi-newton quaternions calibration method for DVL error aided GNSS[J]. IEEE Transactions on Vehicle Technology, 2021, 70(3): 2465-77. doi: 10.1109/TVT.2021.3059755 [8] Zhu J P, Li A, Qin F J, et al. A hybrid method for dealing with DVL faults of SINS/DVL integrated navigation system[J]. IEEE Sensors Journal, 2022, 22(16): 15844-54. [9] Xu B, Guo Y. A novel DVL calibration method based on robust invariant extended Kalman filter[J]. IEEE Transactions on Vehicle Technology, 2022, 71(9): 9422-34. [10] Xu B, Hu J M, Guo Y. An acoustic ranging measurement aided SINS/DVL integrated navigation algorithm based on multivehicle cooperative correction[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71(5): 8504615. [11] Wang B, Huang L, Liu J Y, et al. A support vector regression-based integrated navigation method for underwater vehicles[J]. IEEE Sensors Journal, 2020, 20(15): 8875-83. doi: 10.1109/JSEN.2020.2985998 [12] Wang B, Liu J Y, Deng Z H, et al. A model-free calibration method of inertial navigation system and Doppler sensors[J]. IEEE Sensors Journal, 2021, 21(2): 2219-29. doi: 10.1109/JSEN.2020.3015845 [13] Liu P J, Wang B, Deng Z H, et al. INS/DVL/PS tightly coupled underwater navigation method with limited DVL measurements[J]. IEEE Sensors Journal, 2018, 18(7): 2994-002. doi: 10.1109/JSEN.2018.2800165 [14] Wang D, Xu X S, Yao Y Q, et al. A novel SINS/DVL tightly integrated navigation method for complex environment[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(7): 5183-96. doi: 10.1109/TIM.2019.2955187 [15] Liu S D, Zhang T, Zhang J Y, et al. A new coupled method of SINS/DVL integrated navigation based on improved dual adaptive factors[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 8504211. [16] Xiong H L, Bian R C, Li Y J, et al. Fault-tolerant GNSS/SINS/DVL/CNS integrated navigation and positioning mechanism based on adaptive information sharing factors[J]. IEEE Systems Journal, 2020, 14(3): 3744-54. doi: 10.1109/JSYST.2020.2981366 [17] Kinsey J C, Whitcomb L L. In situ alignment calibration of attitude and Doppler sensors for precision underwater vehicle navigation: Theory and experiment[J]. IEEE Journal of Oceanic Engineering, 2007, 32(2): 286-99. doi: 10.1109/JOE.2007.893686 [18] Liu P J, Zhao S P, Qin L P, et al. A calibration method for DVL measurement errors based on observability analysis[C]//38th Chinese Control Conference. Guangzhou, China: IEEE, 2019: 3851-56. [19] Liu P J, Wang B, Deng Z H, et al. A correction method for DVL measurement errors by attitude dynamics[J]. IEEE Sensors Journal, 2017, 17(14): 4628-38. doi: 10.1109/JSEN.2017.2712282 [20] Yao Y Q, Xu X S, Hou L H, et al. A simple and precise correction method for DVL measurements under the dynamic environment[J]. IEEE Transactions on Vehicle Technology, 2020, 69(10): 10750-58. doi: 10.1109/TVT.2020.3008755 [21] Luo L, Huang Y L, Zhang Z, et al. A new Kalman filter-based in-motion initial alignment method for DVL-aided low-cost SINS[J]. IEEE Transactions on Vehicular Technology, 2021, 70(1): 331-43. [22] Yao Y Q, Xu X S, Zhu Y Y, et al. In-motion coarse alignment method for SINS/DVL with the attitude dynamics[J]. ISA Transactions, 2020, 105: 377-86. doi: 10.1016/j.isatra.2020.05.033 -





 点击查看大图
点击查看大图
计量
- 文章访问数: 179
- HTML全文浏览量: 20
- PDF下载量: 58
- 被引次数: 0




