

Ultra Short Baseline Direction-Finding Algorithm Based on Quaternion Stereo Array for Portable Positioning Equipment
-
摘要: 针对日益增长的潜水员水下协同作业应用需求, 在传统超短基线定位技术基础上, 设计适用于潜水员水下作业的、基于微型超短基线正四面体接收基阵的水下定位测向技术方案。针对其测向能力, 特别是由于多径等复杂水声信道特性、接收基阵不同阵元之间存在的常规手段难以校准的相位差以及潜水员水下作业姿态变化不平稳等对水下作业便携应用带来影响的因素展开仿真分析。仿真结果表明, 该定位测向技术方案具备实际可行性, 可满足潜水员水下协同作业时获取相互位置信息的应用需求。Abstract: In view of the increasing application demand of underwater collaborative operation of divers, based on the traditional ultrashort baseline positioning technology, an underwater positioning and direction-finding technology scheme on the micro ultrashort baseline tetrahedral receiving array is designed for underwater operation of divers. In view of its direction-finding ability, the simulation analysis is conducted on the factors that affect the direction-finding accuracy caused by the complex underwater acoustic channel characteristics, especially multipath, the phase difference between different elements of the receiving array that is difficult to calibrate by conventional means, and the unsteadiness change of the divers’ underwater operation posture. The simulation results show that the positioning and direction-finding technology scheme is feasible and can meet the application needs of divers to obtain mutual position information during underwater collaborative operations.
-
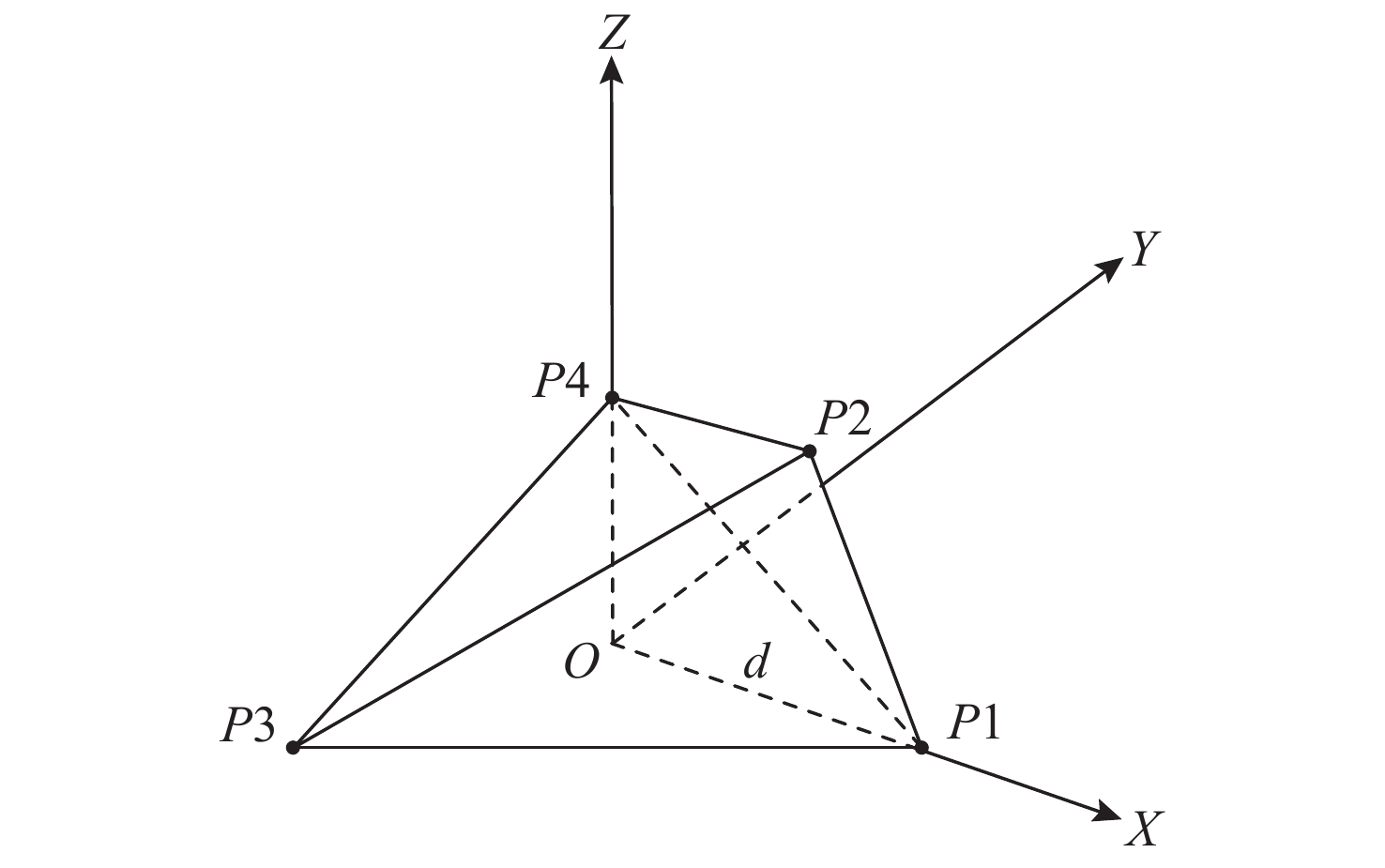
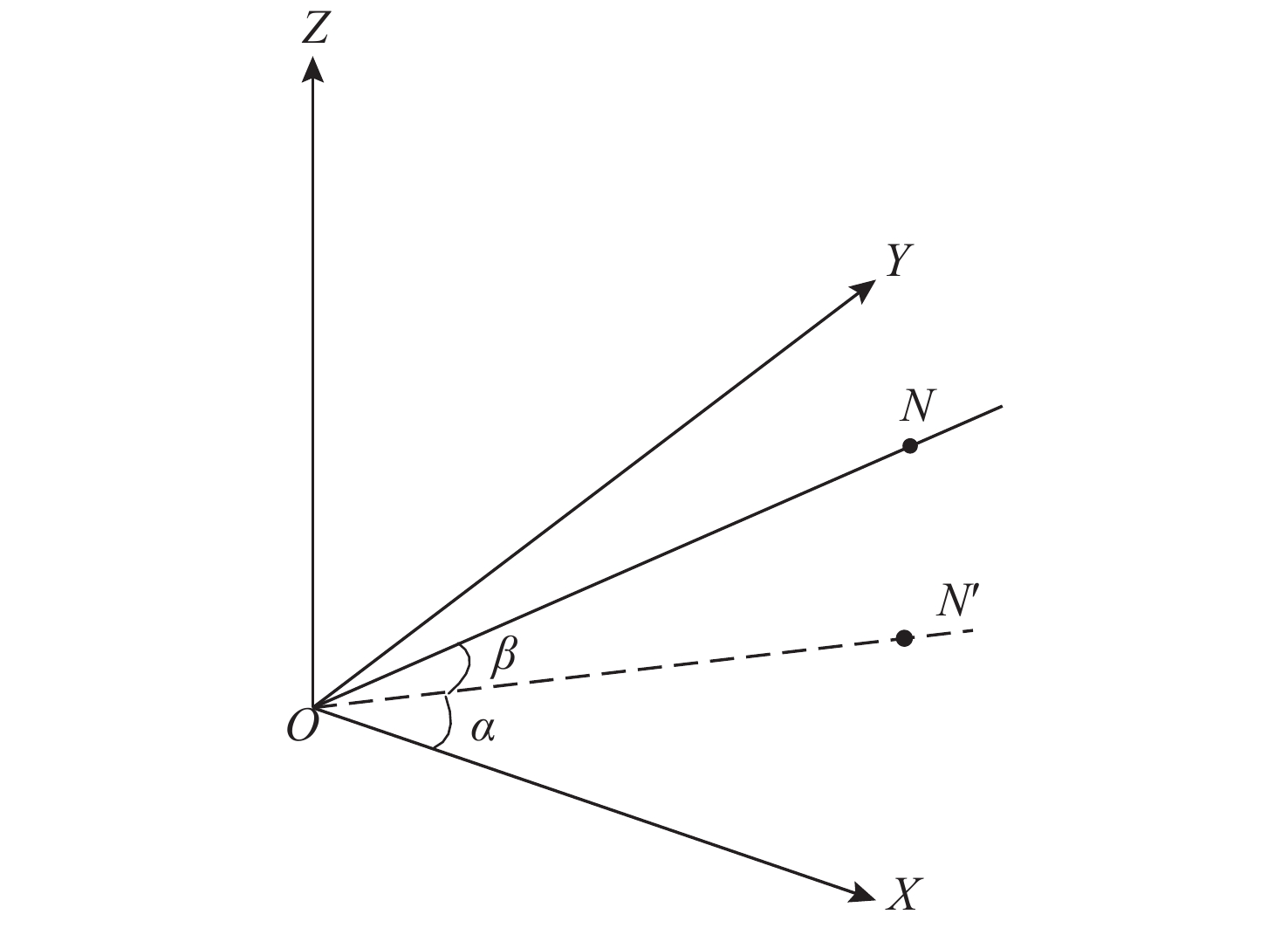
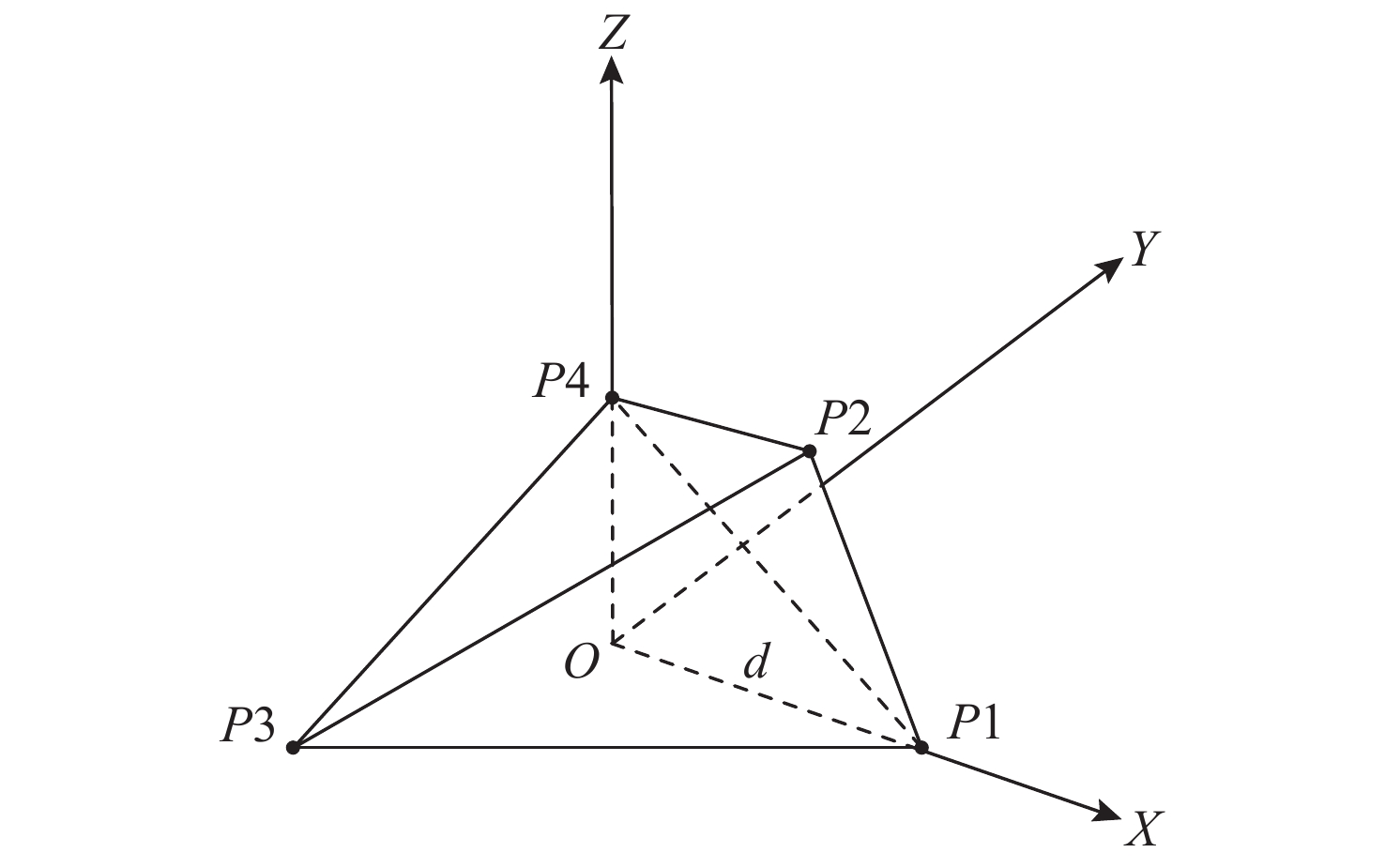
图 1 正四面体接收基阵坐标系示意图
Figure 1. Schematic diagram of coordinate system of regular tetrahedral receiving array
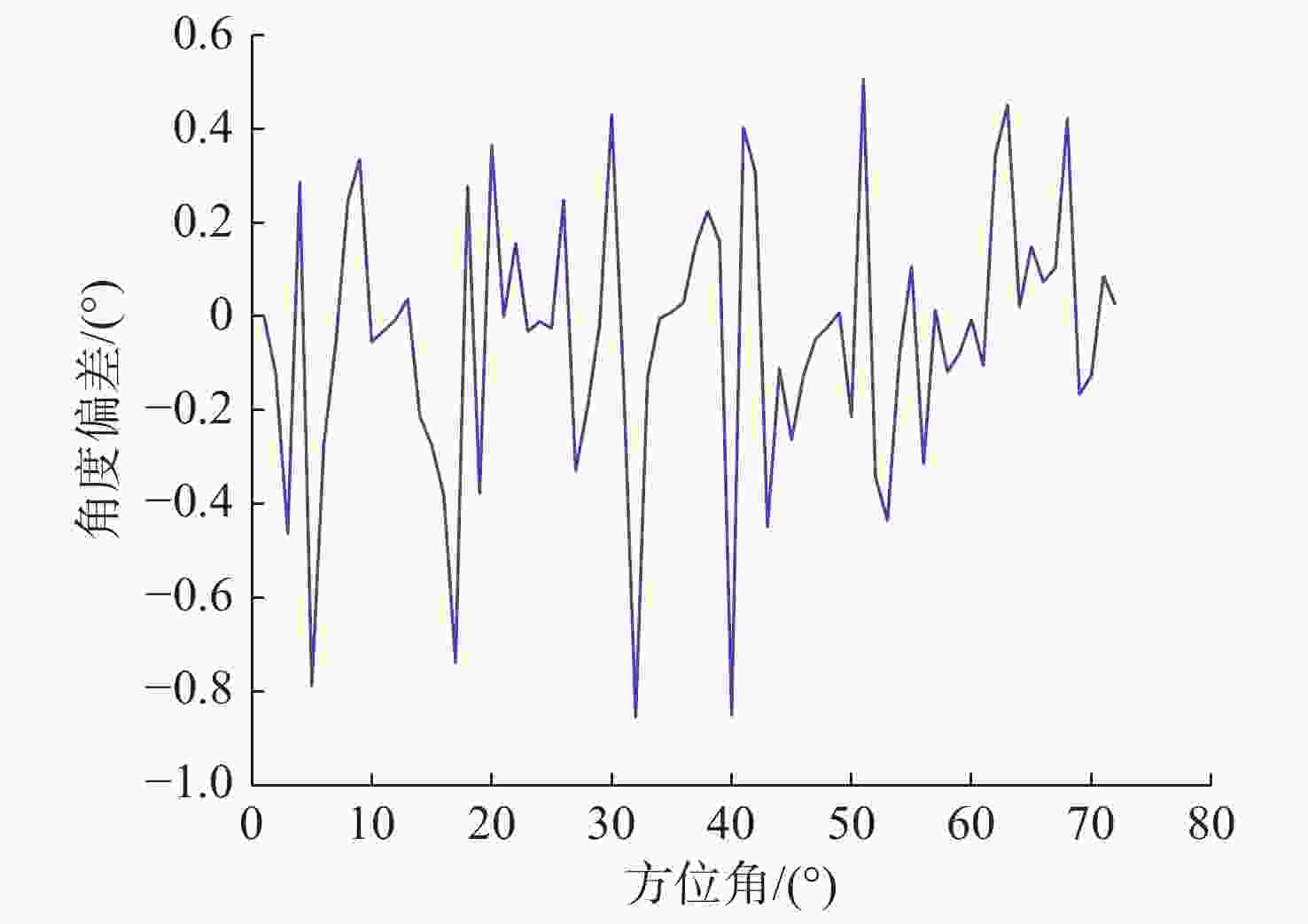
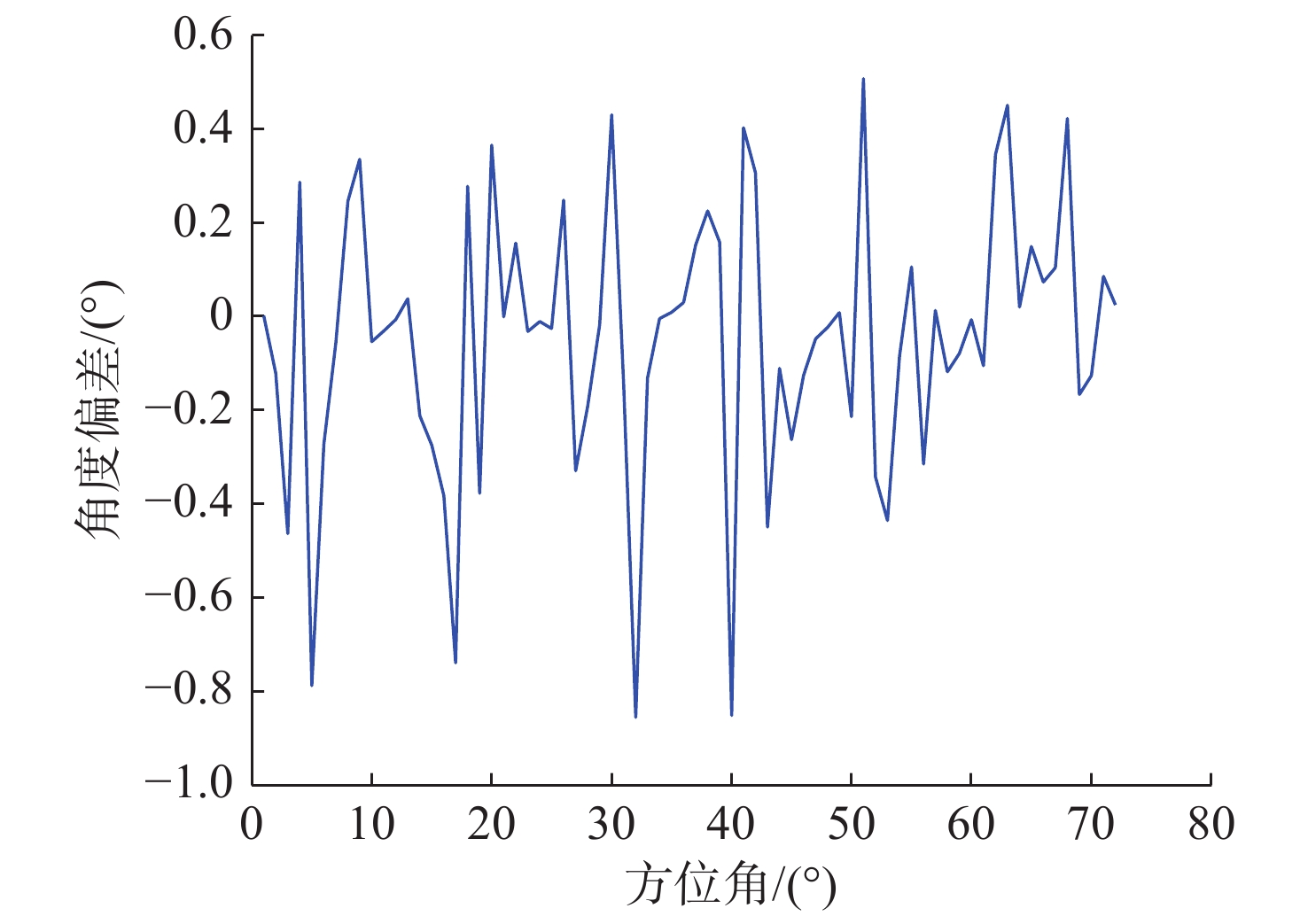
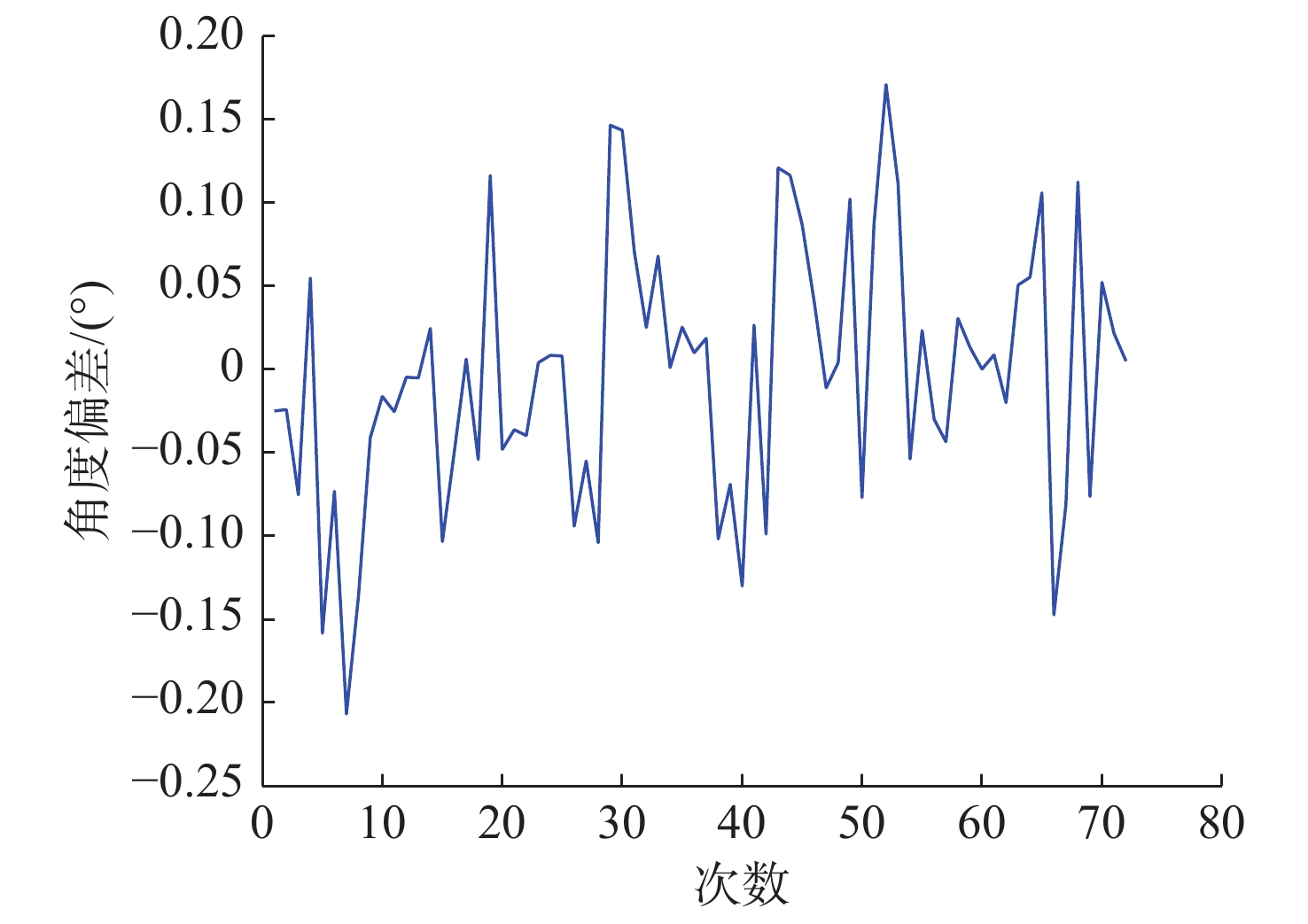
图 3 SNR=6 dB时测量方位和实际方位偏差
Figure 3. Deviation between measuring azimuth and actual azimuth at SNR=6 dB
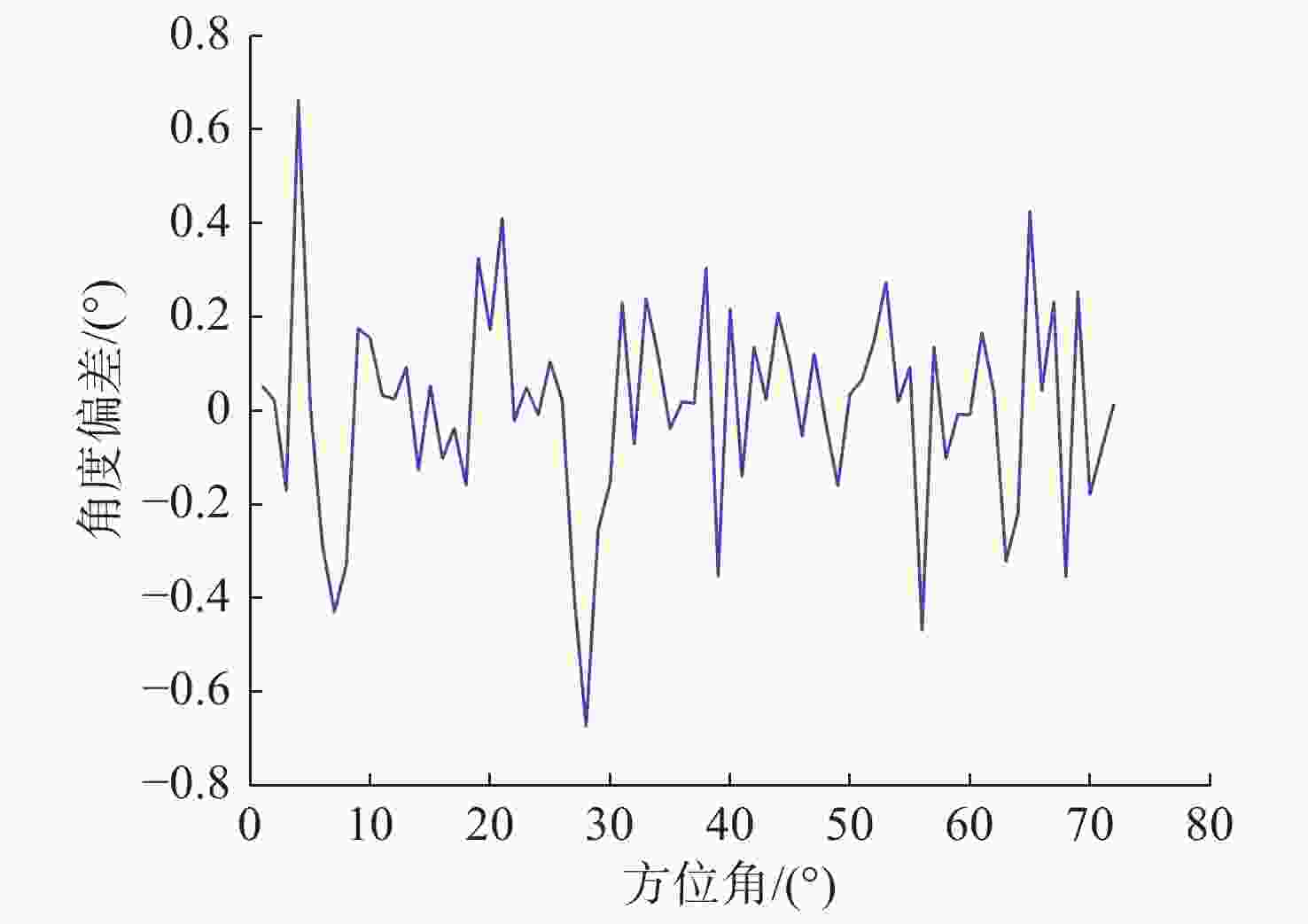
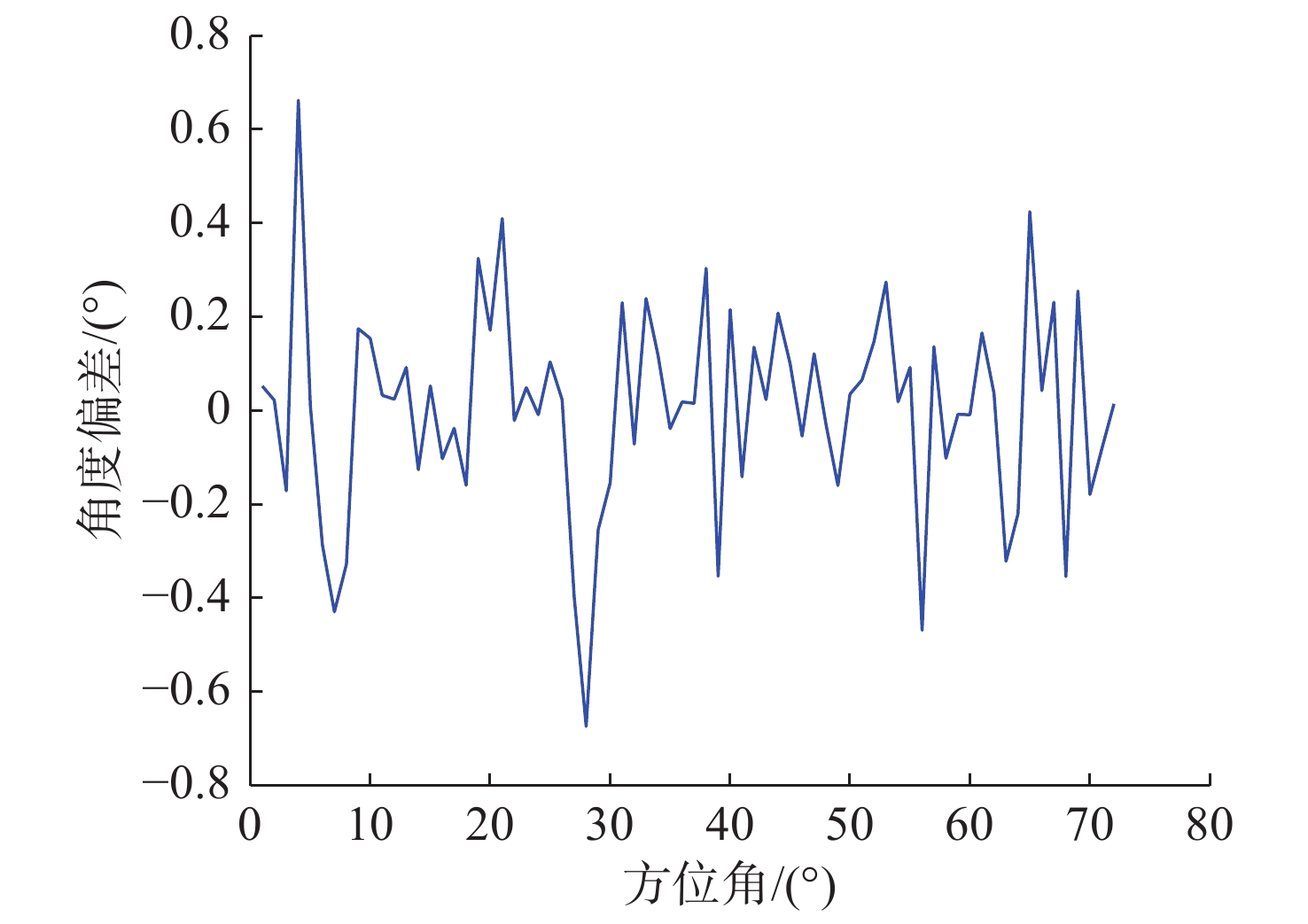
图 4 多径下的测量方位和实际方位偏差
Figure 4. Deviation between measuring azimuth and actual azimuth under multipath

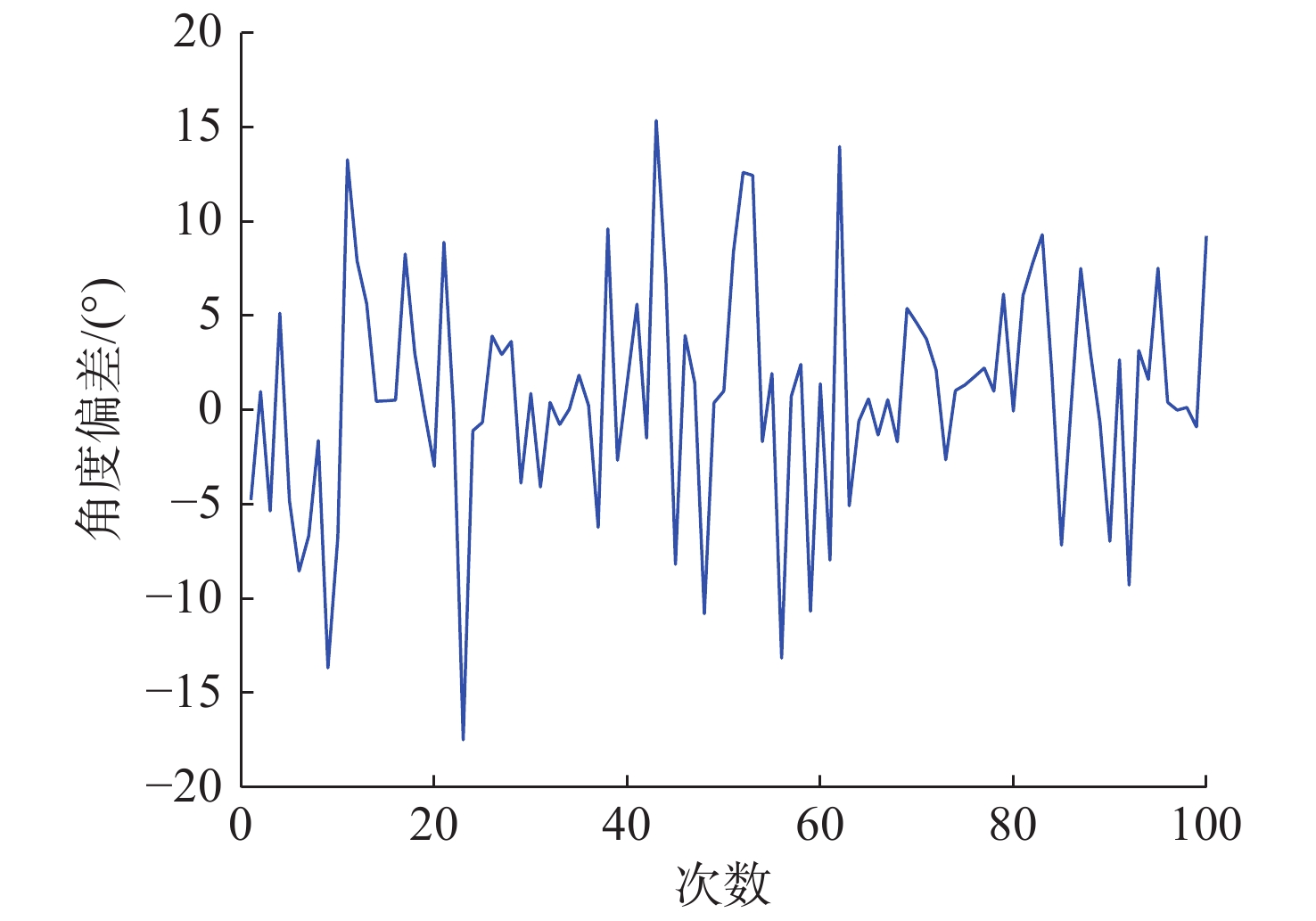
图 5 相位差在−10°~10°间的测量方位和实际方位偏差
Figure 5. Measurement azimuth and actual azimuth deviation with phase difference between −10° and 10°
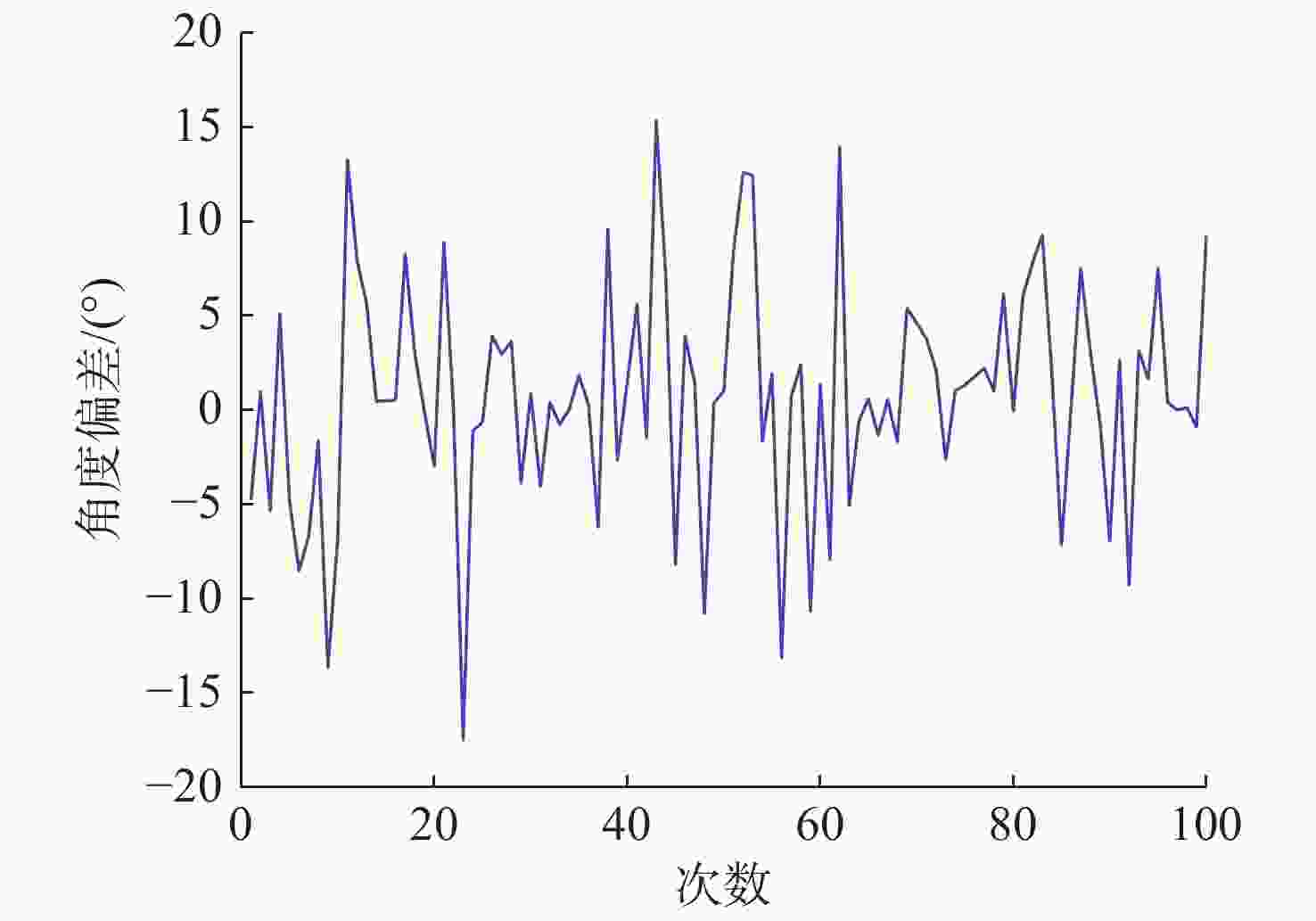
图 6 坐标系变换导致目标方位偏差
Figure 6. Target azimuth deviation caused by coordinate system transformation
-
[1] 刘伯胜, 雷家煜. 水声学原理[M]. 2版. 哈尔滨: 哈尔滨工程大学出版社, 2009. [2] 金博楠, 徐晓苏, 张涛, 等. 超短基线定位技术及在海洋工程中的应用[J]. 导航定位与授时, 2018, 5(4): 8-19. doi: 10.19306/j.cnki.2095-8110.2018.04.002Jin Bo-nan, Xu Xiao-su, Zhang Tao, et al. USBL Technology and Its Applications in Ocean Engineering[J]. Navigation Positioning & Timing, 2018, 5(4): 8-19. doi: 10.19306/j.cnki.2095-8110.2018.04.002 [3] 柴永生, 刘长友, 刘兆全, 等. 一种新型超短基线换能器定位装置的设计与研究[J]. 机械科学与技术, 2014, 33(7): 1053-1057. doi: 10.13433/j.cnki.1003-8728.2014.0722Chai Yong-sheng, Liu Chang-you, Liu Zhao-quan, et al. Design and Research on a New Type of Positioning Mechanism of the Ultra Short Base Line Position System[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(7): 1053-1057. doi: 10.13433/j.cnki.1003-8728.2014.0722 [4] 刘焱雄, 彭琳, 吴永亭, 等. 超短基线水声定位系统校准方法研究[J]. 武汉大学学报(信息科学版), 2006, 31(7): 610-612.Liu Yan-xiong, Peng Lin, Wu Yong-ting, et al. Calibration of Transducerand Transponder Positions[J]. Geomatics and Information Science of Wuhan University, 2006, 31(7): 610-612. [5] 李昭, 郑翠娥, 孙大军. 超短基线声传感器安装偏差标定测线规划[J]. 系统工程与电子技术, 2016, 38(5): 1010-1016. doi: 10.3969/j.issn.1001-506X.2016.05.07Li Zhao, Zheng Cui-e, Sun Da-jun. Track Design for the Acoustic Sensor Installation Alignment Calibration in Ultra Short Baseline Positioning System[J]. Systems Engineering and Electronics, 2016, 38(5): 1010-1016. doi: 10.3969/j.issn.1001-506X.2016.05.07 [6] 范赞. 一种改进型声线修正算法在超短基线定位系统上的应用[J]. 声学与电子工程, 2015, 4(2): 22-25. [7] 黄敏燕, 尹飞星, 刘斌. 超短基线定位系统声线弯曲误差修正方法研究[J]. 声学技术, 2016, 35(6): 281-284.Huang Min-yan, Yin Fei-xing, Liu Bin. Research on Sound Ray Bending Rrror Correction Method of USBL Positioning System[J]. Technical Acoustics, 2016, 35(6): 281-284. [8] Zheng C, Zhao L, Sun D. Study on the Calibration Method of USBL System Based on Ray Tracing[C]//2013 OCEANS. San Diego, USA: IEEE, 2013: 1-4. [9] 于平, 吴波, 谢胜. 水声定位信号脉冲挑选方法[J]. 舰船电子工程, 2012, 32(2): 122-130. doi: 10.3969/j.issn.1627-9730.2012.02.045Yu Ping, Wu Bo, Xie Sheng. A Pulse Selection Method of Acoustic Positioning Signal[J]. Ship Electronic Engineering, 2012, 32(2): 122-130. doi: 10.3969/j.issn.1627-9730.2012.02.045 [10] 赵国贵, 梁红, 陆禹, 等. 基于多参量联合特征的水下小目标分类识别[J]. 水下无人系统学报, 2019, 27(6): 644-650. doi: 10.11993/j.issn.2096-3920.2019.06.007Zhao Guo-gui, Liang Hong, Lu Yu, et al. Classification and Identification of Underwater Small Target Based on Multi-Parameter Joint Feature[J]. Journal of Unmanned Undersea Systems, 2019, 27(6): 644-650. doi: 10.11993/j.issn.2096-3920.2019.06.007 [11] 马艳, 李志舜. 基于连续小波变换的水下目标特征提取与分类[J]. 系统工程与电子技术, 2003(3): 375-378. doi: 10.3321/j.issn:1001-506X.2003.03.034Ma Yan, Li Zhi-shun. Feature Extraction and Classification of an Underwater Target Based on CWT[J]. Systems Engineering and Electronics, 2003(3): 375-378. doi: 10.3321/j.issn:1001-506X.2003.03.034 [12] 王娜, 陈克安. 分段谱质心特征在水下目标识别中的应用[J]. 兵工学报, 2009, 30(2): 144-149. doi: 10.3321/j.issn:1000-1093.2009.02.004Wang Na, Chen Ke-an. Application of Sub-band Spectral Centroid Features to Recognizing Underwater Targets[J]. Acta Armamentarii, 2009, 30(2): 144-149. doi: 10.3321/j.issn:1000-1093.2009.02.004 [13] 付学志, 石建飞, 江源. 蛙人水下作战系统装备发展现状及趋势[J]. 电声技术, 2019, 43(12): 11-17. doi: 10.16311/j.audioe.2019.12.003Fu Xue-zhi, Shi Jian-fei, Jiang Yuan. The Development of the Frogman Underwater combat equipment system[J]. Audio Engineering, 2019, 43(12): 11-17. doi: 10.16311/j.audioe.2019.12.003 [14] 白峻, 曾锋, 刘峰, 等. 蛙人水下信息系统发展综述[J]. 电声技术, 2014, 38(9): 60-63. doi: 10.3969/j.issn.1002-8684.2014.09.014Bai Jun, Zeng Feng, Liu Feng, et al. Development Review of Frogman Underwater Information System[J]. Audio Engineering, 2014, 38(9): 60-63. doi: 10.3969/j.issn.1002-8684.2014.09.014 [15] 郑恩明, 陈新华, 孙长瑜, 等. 一种四元超短基线阵实现高精度定位[J]. 应用声学, 2013, 31(1): 15-22. doi: 10.11684/j.issn.1000-310X.2013.01.003Zheng En-ming, Chen Xin-hua, Sun Chang-yu, et al. An Innovation Four-element Array to Achieve High-precision Positioning of the Ultra-short baseline[J]. Applied Acoustics, 2013, 31(1): 15-22. doi: 10.11684/j.issn.1000-310X.2013.01.003 [16] 韩瑞宁, 周东辉. 超短基线定位精度与误差分析[J]. 微计算机信息, 2008, 24(3-1): 160-162. doi: 10.3969/j.issn.1008-0570.2008.07.064Han Rui-ning, Zhou Dong-hui. The Analysis and Improvement for Error and Positioning of USBL[J]. Microcomputer Information, 2008, 24(3-1): 160-162. doi: 10.3969/j.issn.1008-0570.2008.07.064 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 163
- HTML全文浏览量: 25
- PDF下载量: 35
- 被引次数: 0




