

Route Optimization of on Call Submarine Search Based on Genetic Algorithm
-
摘要: 针对水面舰艇应召反潜中敌潜艇未知航向机动的情形, 提出了一种基于遗传算法的对潜搜索方法。该方法分别结合了舰船声呐探测模型、敌潜艇目标运动模型、舰船搜索运动模型以及搜索路径发现概率计算模型, 并将信息置信度引入发现概率计算模型, 增强了发现概率计算的可信度; 再利用遗传算法分别求解单舰及双舰在应召反潜搜索过程中每段的最优航向角和速度, 分别给出单舰和双舰应召螺旋搜索的最优路径; 最后给出了单舰和双舰在仅改变转角和既改变转角又改变速度条件下, 搜索到目标发现概率的变化规律。通过与传统螺旋算法对比表明, 增加改变速度的舰船搜索机制更为灵活, 可提高发现概率; 当搜索兵力足够时, 采用多舰编队搜索可大幅度提高发现概率。该研究可为水面舰搜攻潜作战提供参考。Abstract: To address the situation wherein an enemy submarine maneuvers in an unknown course when an anti-submarine surface ship is called, a genetic algorithm-based submarine search method is proposed. The method combines the ship sonar detection model, enemy submarine target motion model, ship search motion model, and search path discovery probability calculation model. It introduces information confidence into the discovery probability calculation model, which enhances its reliability. Subsequently, a genetic algorithm is used to solve the optimal heading angle and speed of each section of a single ship and double ships in the on-call search process, and the optimal paths of single and double ships on call spiral search are determined. Finally, the variation law of the discovery probability of searching the target is formulated under the conditions of changing only the heading angle and changing both the angle and speed of single and double ships. The results indicate that, compared to the traditional spiral algorithm, the ship search mechanism with increasing change speed is more flexible and can improve the discovery probability. When the search force is sufficient, using a multiship formation search can significantly improve the discovery probability. The results provide a tactical reference for surface ship searches and submarine attacks.
-
Key words:
- surface ship /
- on call search /
- spiral search /
- genetic algorithm /
- discovery probability
-
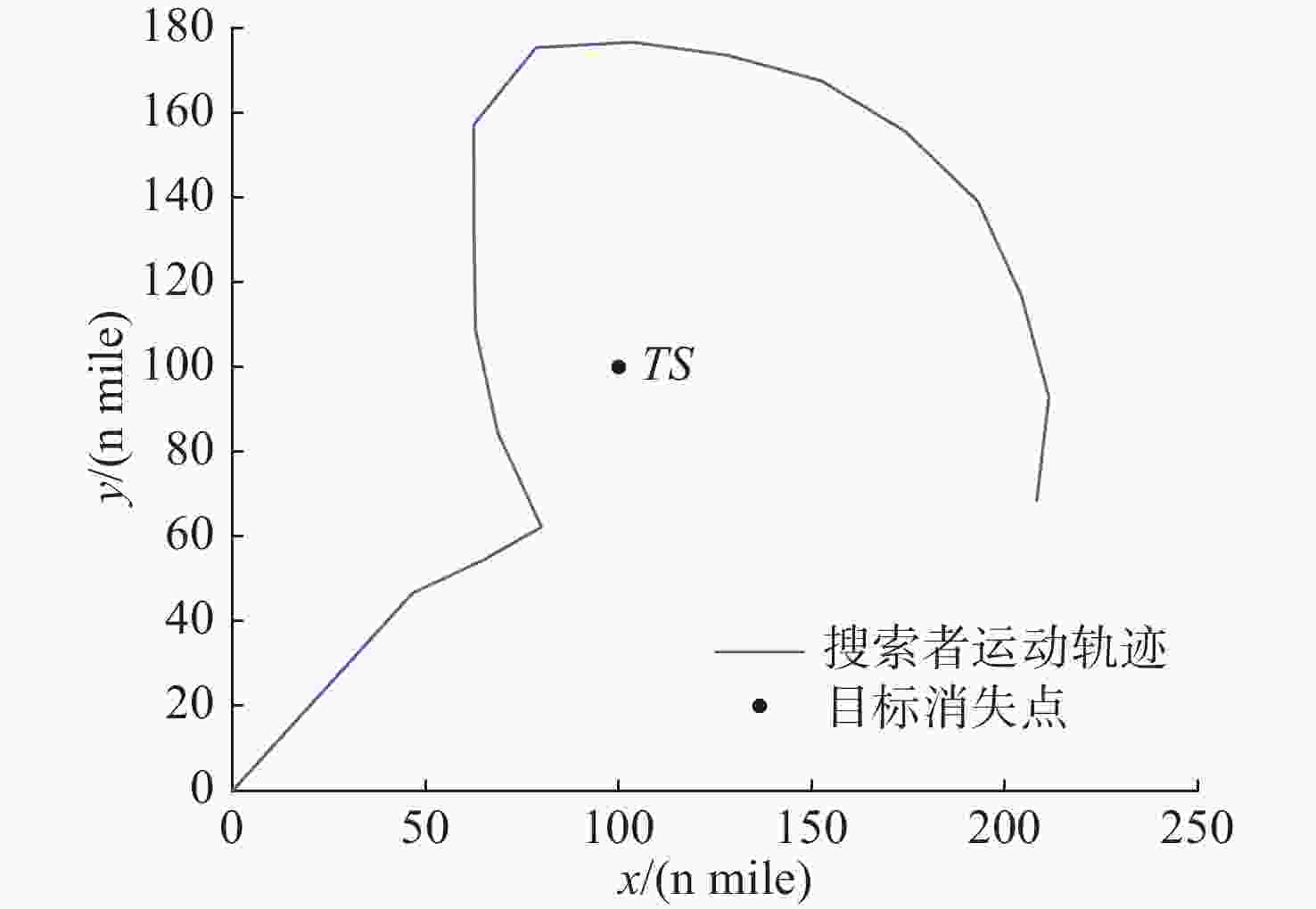
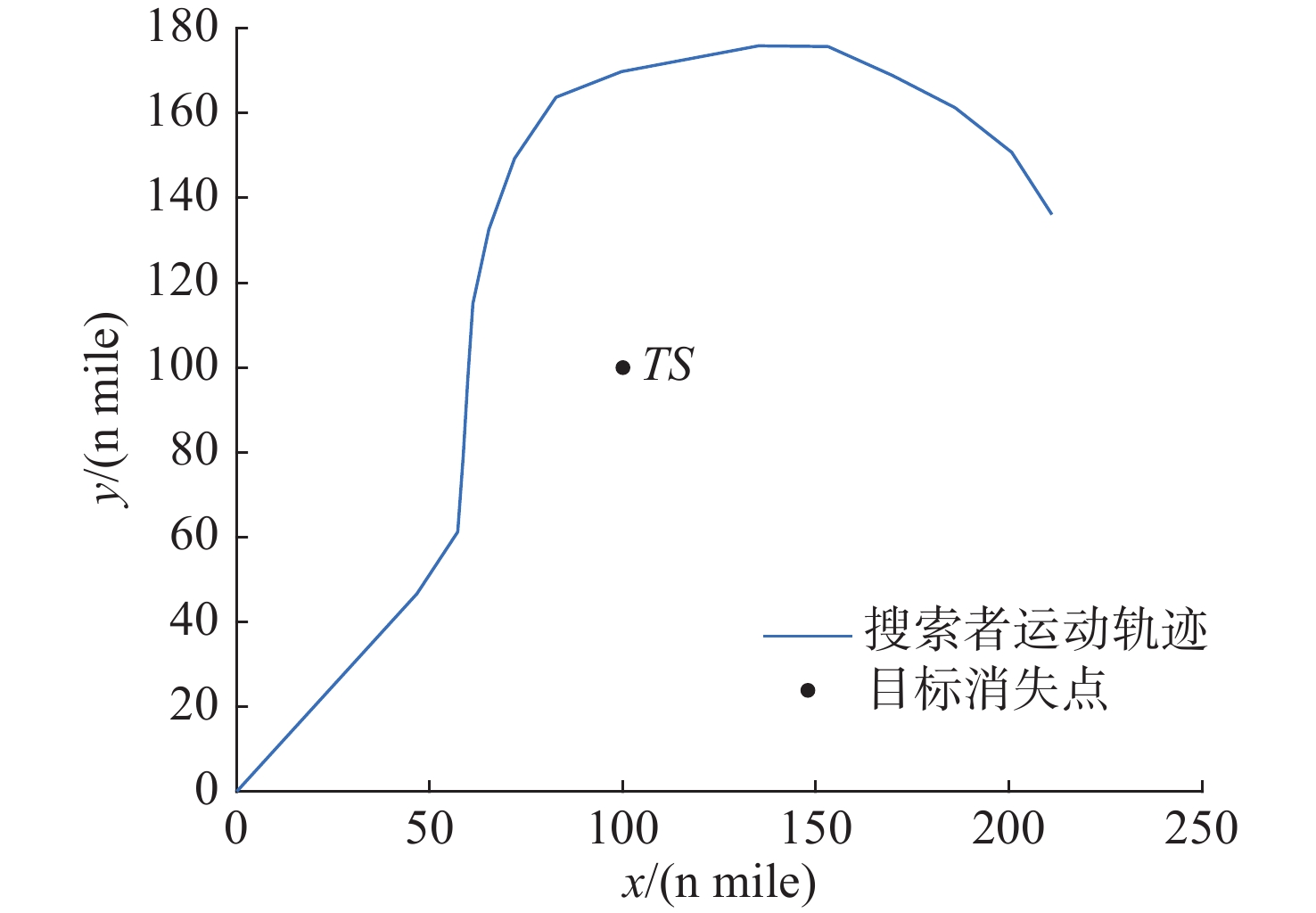
图 7 单舰改变各段航向角和各段速度的搜索路径
Figure 7. Search path of single ship changing heading angle and speed of each section
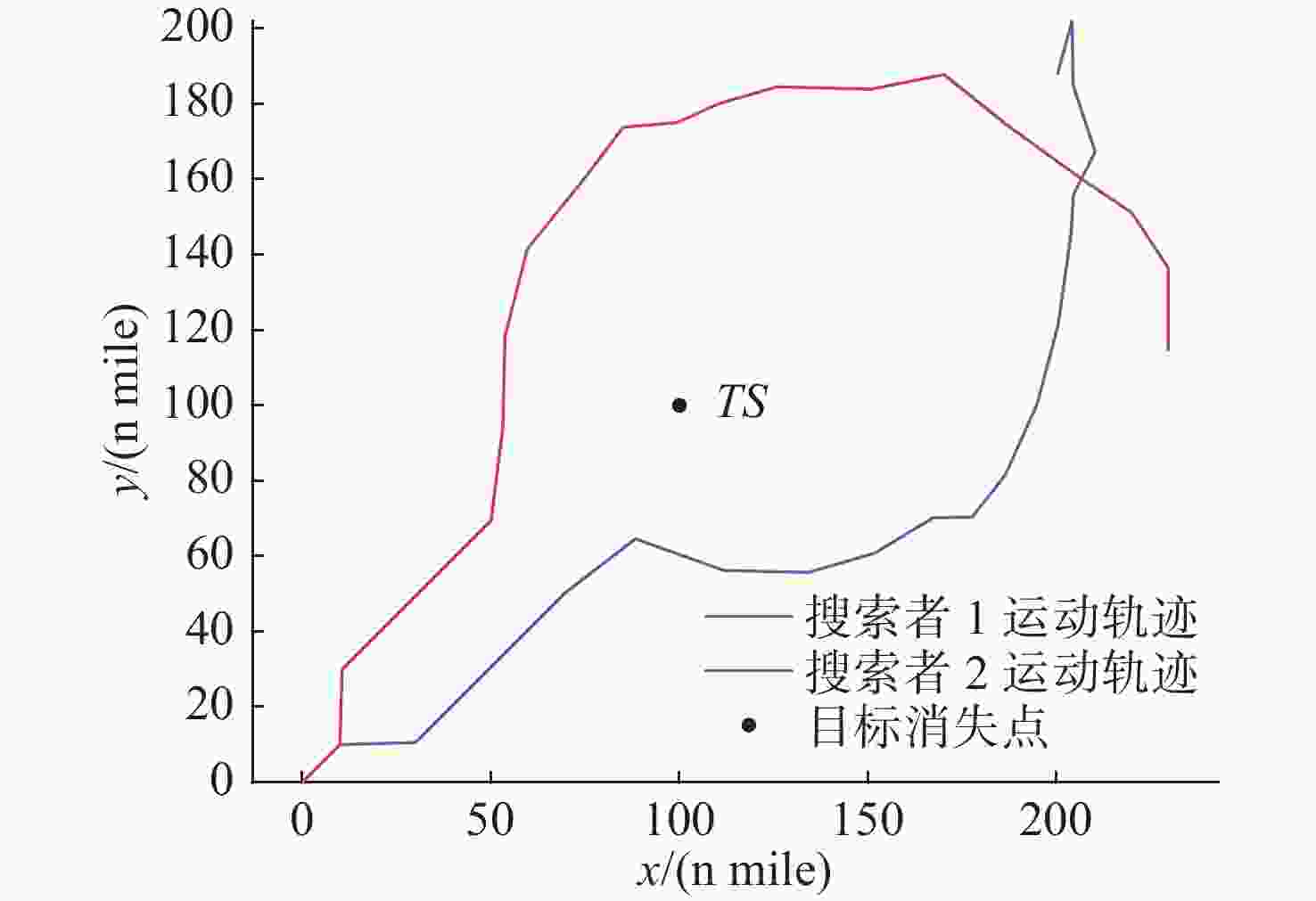
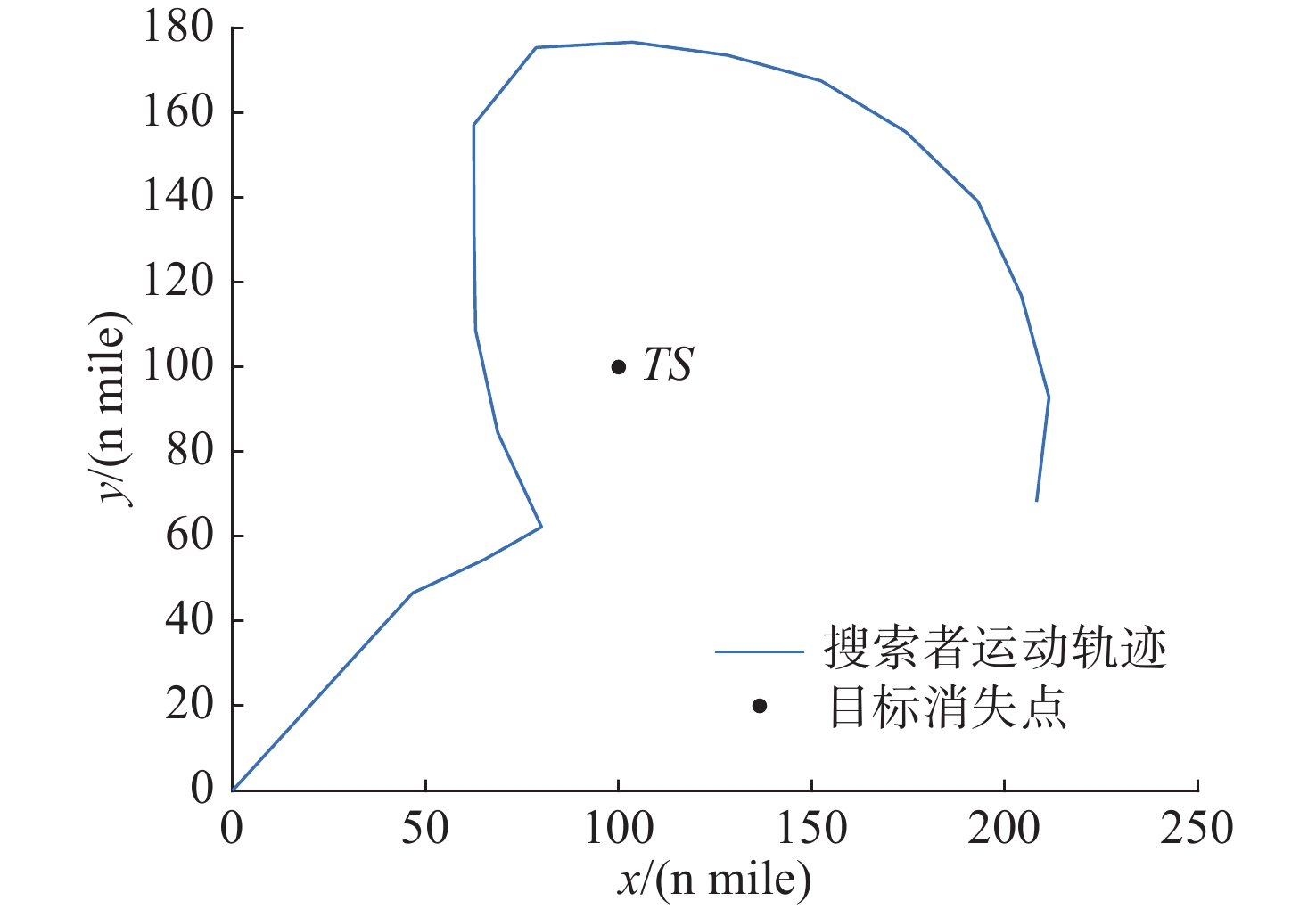
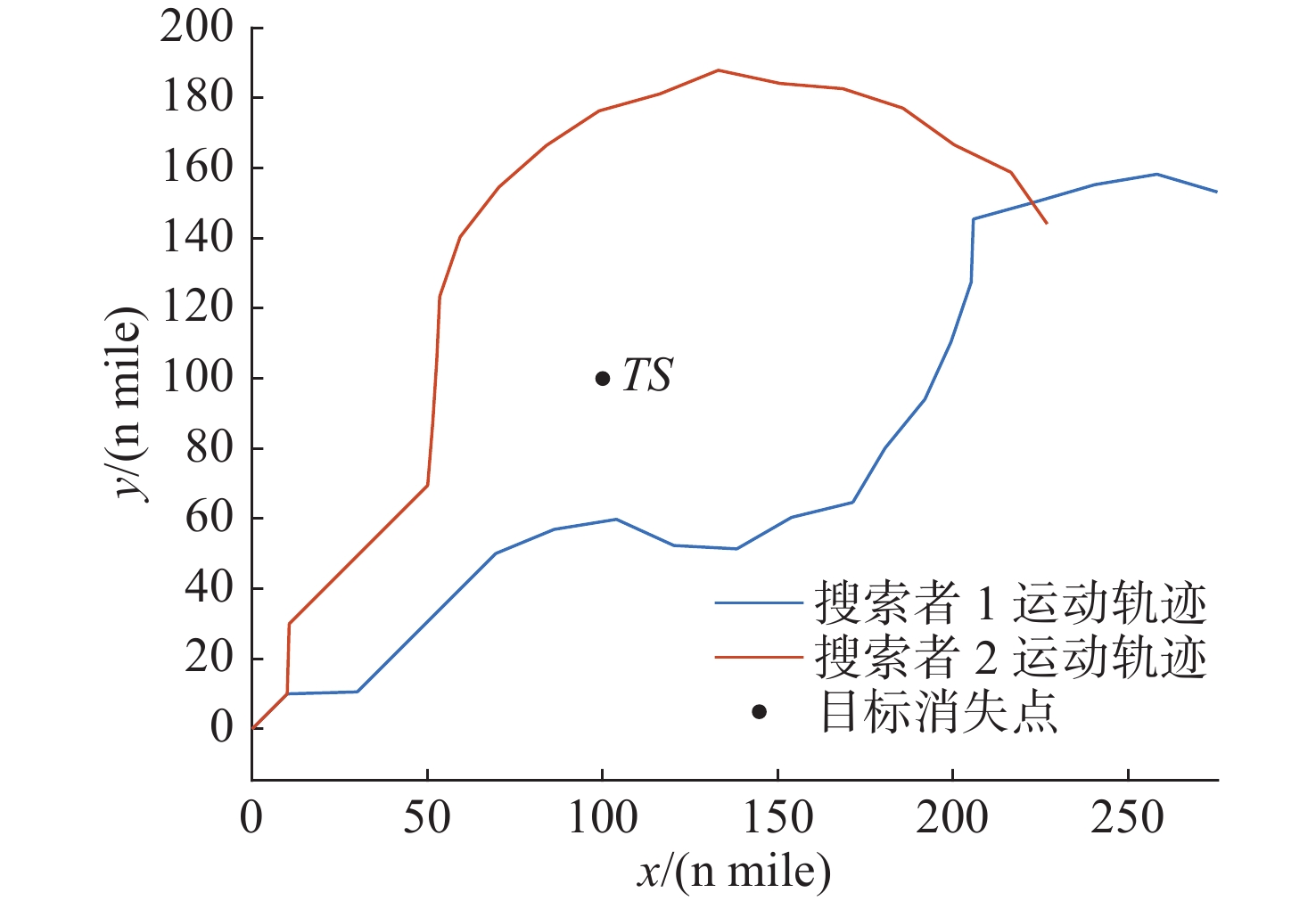
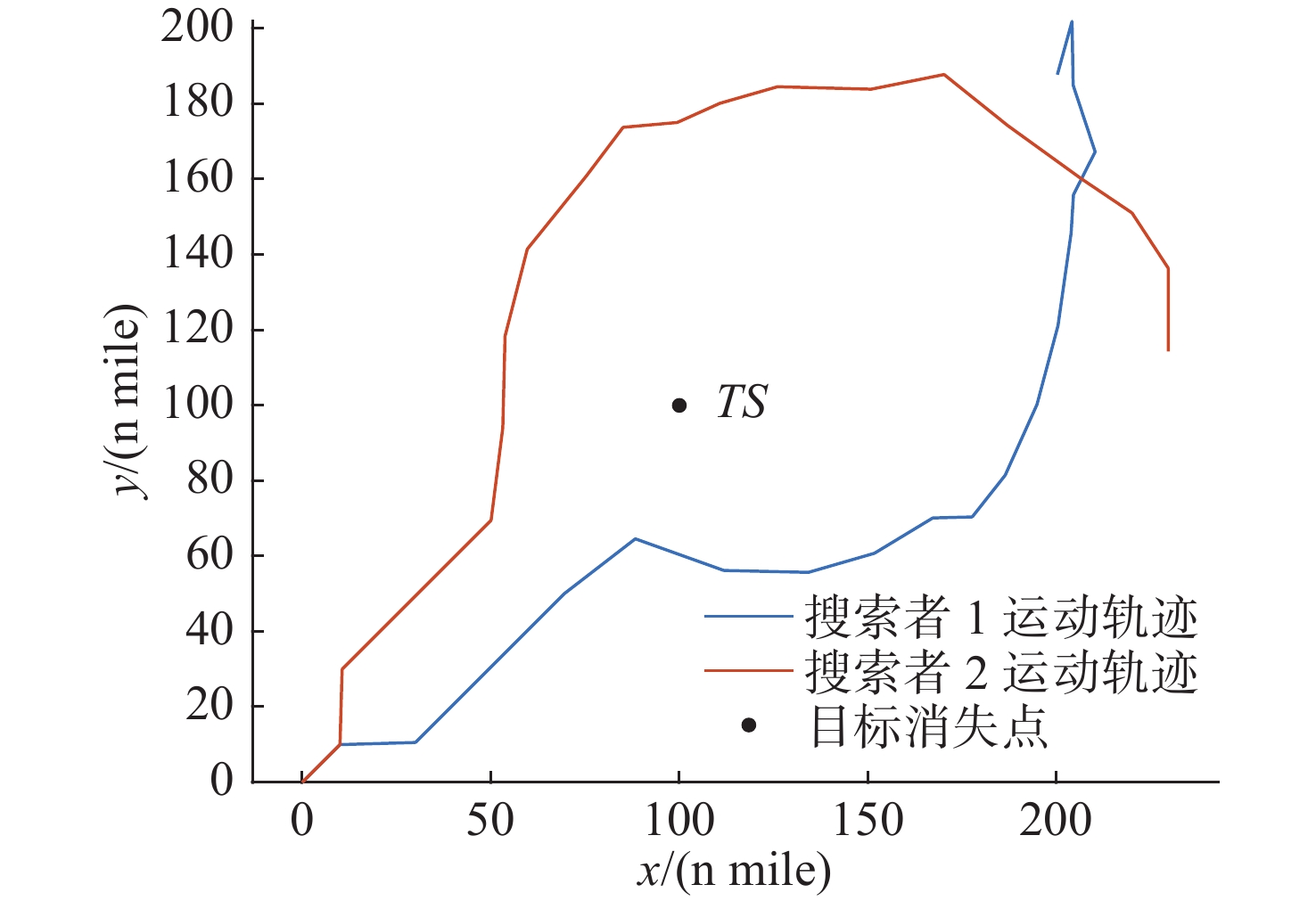
图 11 双舰改变各段航向角和各段速度的搜索路径
Figure 11. Search path of double ships changing heading angle and speed of each section
表 1 引入信息置信度参数变化
Table 1. Parameter changes of introduced information confidence
参数名称 未引入信息置信度 引入信息置信度后 目标消失方位 $({x_0},{y_0})$ $({x_0},{y_0})Q$ 航速 $V$ $VQ$  下载: 导出CSV
下载: 导出CSV
表 2 单舰仅改变航向角参数值
Table 2. Parameter values of single ship only changing heading angle
阶段数 θ/rad 阶段数 θ/rad 1 0.626 6 9 1.400 8 2 0.079 5 10 1.401 1 3 0.064 7 11 1.579 8 4 0.074 1 12 1.959 2 5 0.232 1 13 2.009 3 6 0.378 8 14 2.193 4 7 0.639 1 15 2.525 0 8 1.228 4
下载: 导出CSV
表 3 单舰改变各段速度和航向角参数值
Table 3. Parameter values of changing speed and heading angle of each section of a single ship
阶段数 ${v \mathord{\left/ {\vphantom {v {{\text{kn}}}}} \right. } {{\text{kn}}}}$ ${\theta \mathord{\left/ {\vphantom {\theta {{\text{rad}}}}} \right. } {{\text{rad}}}}$ 1 20.177 4 1.168 1 2 16.678 0 1.092 6 3 24.991 2 5.812 2 4 24.921 8 6.050 2 5 24.714 4 6.266 5 6 23.727 5 6.282 1 7 24.326 8 0.724 3 8 24.989 9 1.520 3 9 24.958 0 1.695 6 10 24.830 5 1.815 3 11 24.954 2 2.072 5 12 24.985 5 2.292 0 13 24.905 0 2.673 7 14 24.980 5 2.851 6 15 24.951 4 3.270 7
下载: 导出CSV
表 4 单舰不同搜索算法的发现概率对比
Table 4. Comparison of discovery probability of different search algorithms for single ship
仿真次数 发现概率/% 单舰变航向
搜索算法单舰变航向和
速度搜索算法单舰传统螺旋
搜索算法100 69.80 79.20 42.43 500 69.82 79.18 42.45 1 000 69.84 79.17 42.39 2 000 69.81 79.19 42.42
下载: 导出CSV
表 5 双舰仅改变航向角参数值
Table 5. Parameter values of only changing heading angle of double ships
阶段数 ${{{\theta _1}} \mathord{\left/ {\vphantom {{{\theta _1}} {{\text{rad}}}}} \right. } {{\text{rad}}}}$ ${{{\theta _2}} \mathord{\left/ {\vphantom {{{\theta _2}} {{\text{rad}}}}} \right. } {{\text{rad}}}}$ 1 1.179 1 0.080 3 2 1.410 7 0.064 0 3 1.998 8 0.045 9 4 1.624 2 0.330 6 5 1.047 9 0.661 2 6 1.330 9 0.849 8 7 0.535 8 0.990 1 8 0.683 8 1.298 3 9 0.427 2 1.186 4 10 0.325 7 1.781 1 11 0.033 7 1.654 4 12 1.300 9 1.884 6 13 1.288 0 2.191 8 14 1.404 4 2.021 5 15 1.857 2 2.530 5
下载: 导出CSV
表 6 双舰改变各段速度和各段航向角参数值
Table 6. Parameter values of heading angle and speed of each section changed by double ships
阶段数 ${{{v_1}} \mathord{\left/ {\vphantom {{{v_1}} {{\text{kn}}}}} \right. } {{\text{kn}}}}$ ${{{\theta _1}} \mathord{\left/ {\vphantom {{{\theta _1}} {{\text{rad}}}}} \right. } {{\text{rad}}}}$ $ {{{v_2}} \mathord{\left/ {\vphantom {{{v_2}} {{\text{kn}}}}} \right. } {{\text{kn}}}} $ ${{{\theta _2}} \mathord{\left/ {\vphantom {{{\theta _2}} {{\text{rad}}}}} \right. } {{\text{rad}}}}$ 1 23.775 9 0.913 2 24.748 7 0.125 7 2 24.932 3 1.914 3 24.318 4 0.024 6 3 22.450 5 1.593 2 23.845 4 0.250 1 4 18.205 7 1.288 9 24.905 1 0.679 2 5 18.104 8 1.026 6 16.196 8 0.646 1 6 10.453 1 1.545 9 14.426 6 1.481 8 7 14.095 9 0.668 4 12.418 1 1.147 9 8 20.580 9 0.422 5 15.895 8 1.290 7 9 21.647 3 0.260 3 24.853 2 1.597 2 10 24.788 0 0.141 0 19.722 3 1.372 0 11 10.229 7 0.061 0 21.602 7 2.247 2 12 12.748 0 0.468 1 24.030 4 2.196 8 13 18.631 7 5.964 3 16.283 2 2.163 9 14 16.948 0 6.266 2 17.540 8 2.561 3 15 14.691 8 3.410 1 22.136 5 3.140 4
下载: 导出CSV
表 7 双舰不同搜索算法的发现概率对比
Table 7. Comparison of discovery probability of different search algorithms for double ships
仿真次数 发现概率/% 双舰编队变航向
搜索算法双舰编队变航向和
速度搜索算法100 87.01 95.00 500 86.97 95.03 1 000 87.02 94.96 2 000 86.98 95.03 仿真次数 发现概率/% 双舰传统螺旋搜索算法 双舰单独搜索算法 100 65.78 66.82 500 65.80 66.87 1 000 65.82 66.81 2 000 65.81 66.85
下载: 导出CSV
-
[1] 陈菁, 何心怡, 高贺, 等. 水面舰艇编队反潜武器系统架构与关键技术[J]. 指挥控制与仿真, 2016, 38(6): 12-15.Chen Jing, He Xinyi, Gao He, et al. Anti-submarine weapon system architecture and key technology of surface ship formation[J]. Command Control and Simulation, 2016, 38 (6): 12-15. [2] 鞠建波, 郁红波, 范赵鹏, 等. 吊放声呐扩展螺旋阵搜潜效能评估改进方法[J]. 水下无人系统学报, 2020, 28(4): 434-439.Ju Jianbo, Yu Hongbo, Fan Zhaopeng, et al. An improved method for submarine search efficiency evaluation of extended spiral array of suspended sonar[J]. Journal of Underwater Unmanned Systems, 2020, 28 (4): 434-439. [3] 屈也频, 廖瑛. 潜艇位置散布规律与搜潜效能评估模型研究[J]. 系统仿真学报, 2008(12): 3280-3283, 3289. doi: 10.16182/j.cnki.joss.2008.12.054Qu Yepin, Liao Ying. Research on submarine position dispersion law and submarine search efficiency evaluation model[J]. Journal of System Simulation, 2008(12): 3280-3283, 3289. doi: 10.16182/j.cnki.joss.2008.12.054 [4] 崔旭涛, 何友, 杨日杰. 应召平行搜索方法的多舰协同搜潜概率[J]. 火力与指挥控制, 2010 (8): 29-31.Cui Xutao, He You, Yang Rijie. Multi ship cooperative submarine search probability of call parallel search method[J]. Fire and command and control, 2010(8): 29-31 [5] 吴芳, 杨日杰, 徐俊艳. 基于遗传算法的对潜螺旋搜索[J]. 系统仿真学报, 2009, 21(6): 1682-1684.Wu Fang, Yang Rijie, Xu Junyan. Latent spiral search based on genetic algorithm[J]. Journal of System Simulation, 2009, 21(6): 1682-1684. [6] 崔旭涛, 杨日杰, 何友. 基于潜艇航向均匀分布的多舰检查搜潜建模与仿真[J]. 现代电子技术, 2009(23): 20-22, 26.Cui Xutao, Yang Rijie, He You. Modeling and simulation of multi ship inspection and submarine search based on uniform distribution of submarine course[J]. Modern Electronic Technology, 2009(23): 20-22, 26. [7] Martin J. Multiplying the effectiveness of helicopter ASW sensors[J]. Sea Technology(S0093-3651), 2006, 47(11): 33-36. [8] 崔旭涛, 何友, 杨日杰, 等. 基于舰壳声纳的多舰协同检查搜潜建模与仿真[J]. 海军航空工程学院学报, 2009, 24(5): 568-572.Cui Xutao, He you, Yang Rijie, et al. Modeling and simulation of multi ship cooperative inspection submarine search based on ship hull sonar[J]. Journal of Naval Aeronautical Engineering College, 2009, 24(5): 568-572. [9] 赵亮, 任耀峰, 张献. 舰艇编队协同应召搜索最优路径规划方法[J]. 指挥控制与仿真, 2017(2): 24-30. doi: 10.3969/j.issn.1673-3819.2017.02.006Zhao Liang, Ren Yaofeng, Zhang Xian. Optimal path pl- anning method for ship formation cooperative call to se- arch[J]. Command control and simulation, 2017(2): 24-30. doi: 10.3969/j.issn.1673-3819.2017.02.006 [10] 瓦格纳, 迈兰德, 森德. 海军运筹分析[M]. 3 版. 姜青山, 郑保华, 译. 北京: 国防工业出版社, 2008. [11] Kierstead D P, DelBalzo D R. A genetic algorithm applied to planning search paths in complicated environment[J]. Military Operations Research, 2003, 8(2): 45-59. doi: 10.5711/morj.8.2.45 [12] 吴柱, 孙睿, 许腾. 搜潜发现概率模型探讨[J]. 指挥控制与仿真, 2010, 32(5): 28-30.Wu Zhu, Sun Rui, Xu Teng. Discussion on probability model of submarine search and discovery[J]. Command control and simulation, 2010, 32(5): 28-30. [13] 张溢文, 尹韶平, 王志杰, 等. 基于多目标遗传算法的雷载计算机隔振系统优化设计[J]. 水下无人系统学报, 2017, 25(2): 57-63.Zhang Yiwen, Yin Shaoping, Wang Zhijie, et al. Optimal design of vibration isolation system of mine borne computer based on multi-objective genetic algorithm[J]. Journal of Underwater Unmanned Systems, 2017, 25(2): 57-63. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 159
- HTML全文浏览量: 117
- PDF下载量: 54
- 被引次数: 0




