

Waypoint-tracking Control of a Benthic AUV Based on Model-free Adaptive Control Method
-
摘要: 为了解决海洋环境不确定因素高、底栖式自主水下航行器(AUV)模型参数难以精确确定等问题, 将无模型自适应控制(MFAC)方法应用于路径点跟踪控制系统中。针对传统MFAC方法在航向控制中可能存在的积分累加效应引起的收敛速度慢、跟踪精度低等问题, 设计了一种改进的MFAC航向控制器, 证明了航向控制误差的有界性。接着, 针对封闭型视线法制导算法应用于路径点跟踪控制时AUV在路径点切换处航向控制超调较大的问题, 提出了一种双曲正切型航速调整策略, 该策略可以明显促进AUV在路径点切换处的平滑过渡并改善跟踪误差的收敛速度。最后, 进行了底栖式AUV航向控制以及路径点跟踪控制外场试验, 验证了所设计算法的有效性和优越性。
-
关键词:
- 底栖式自主水下航行器 /
- 无模型自适应控制 /
- 视线法制导
Abstract: In this study, the model-free adaptive control(MFAC) method was applied to a waypoint-tracking control system to solve the problems of high uncertainty in the marine environment and difficulty in accurately determining the benthic autonomous undersea vehicle(AUV) model parameters. Moreover, an improved MFAC course controller was designed and the boundedness of the course control error was verified to solve the problems of a slow convergence rate and low tracking accuracy during course control due to the integral additive effect of the traditional MFAC method. Subsequently, a hyperbolic tangent speed adjustment strategy was proposed to solve the problem whereby the course control overshoot of the AUV is large at the waypoint switch when the closed line of sight(LOS) guidance algorithm is applied to waypoint-tracking control. And this strategy can significantly promote the smooth transition of the AUV at the waypoint switch and improve the convergence speed of the tracking error. Finally, an outfield test of the course control and waypoint-tracking control of the benthic AUV was conducted to verify the effectiveness and superiority of the proposed algorithm. -

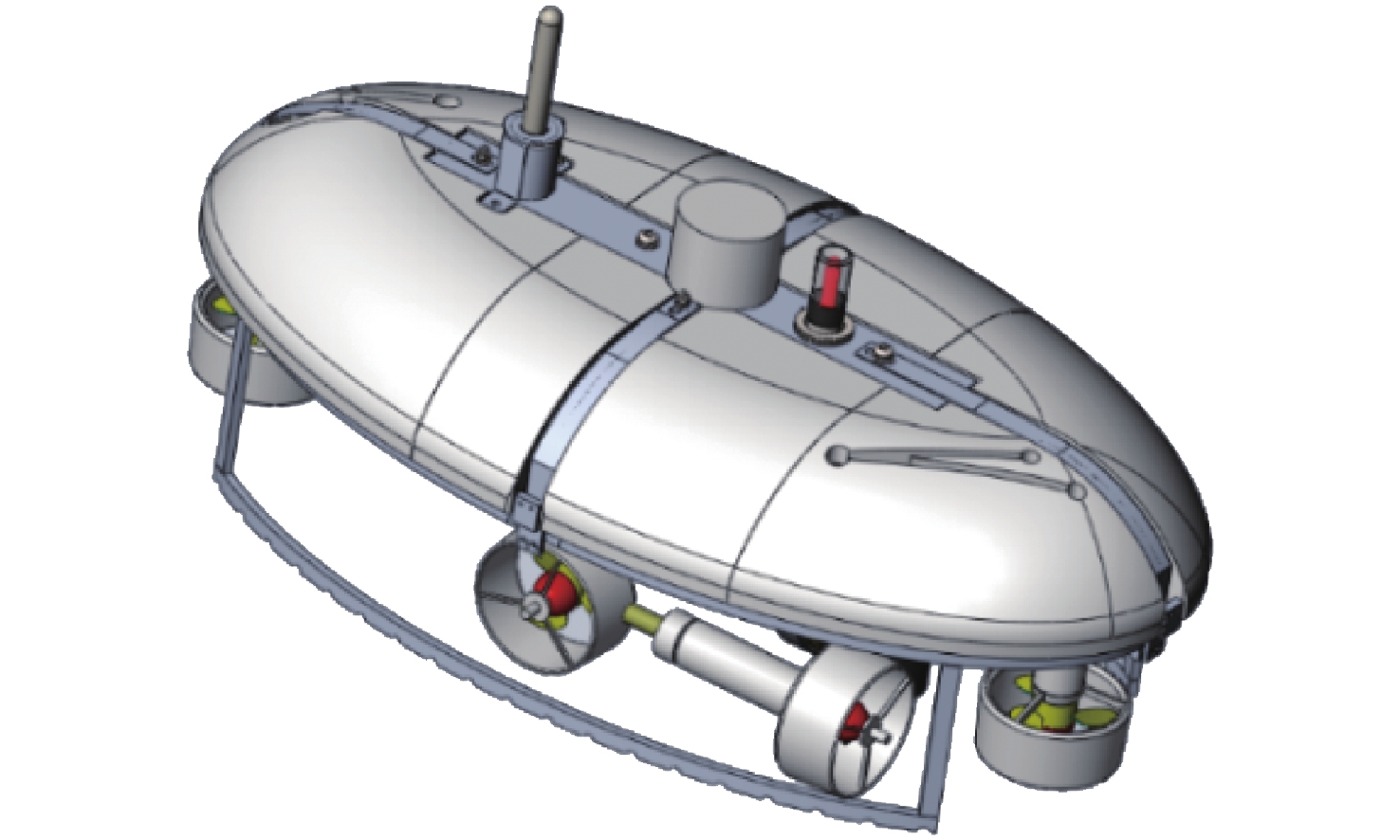
图 3 底栖式AUV路径点跟踪控制示意图
Figure 3. Schematic diagram of waypoint-tracking control of a benthic AUV

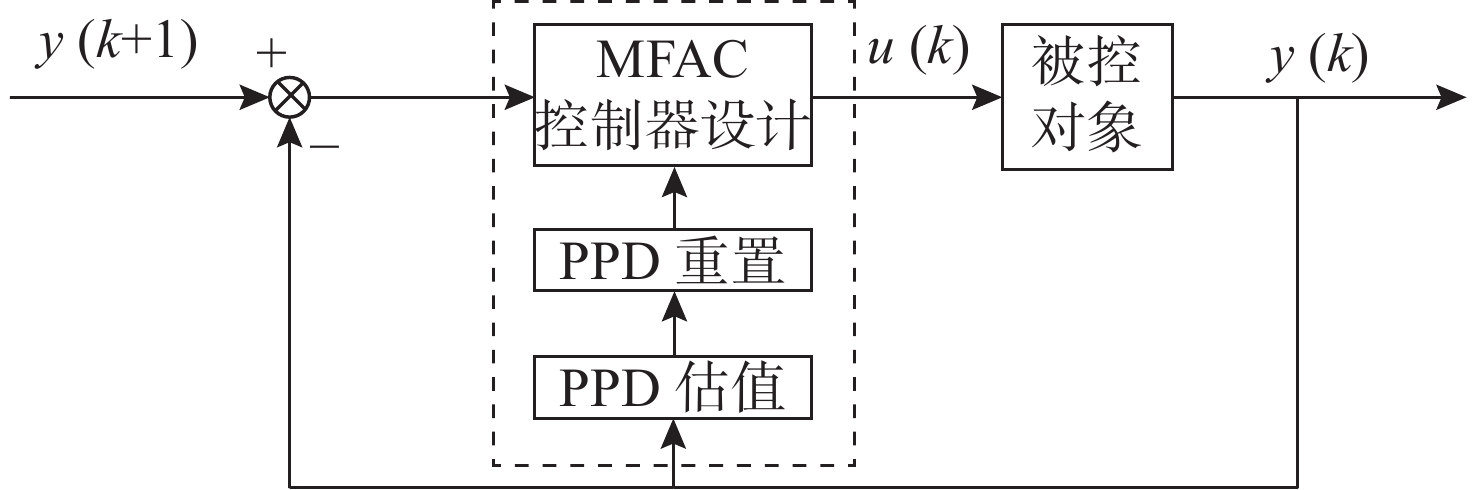
图 4 底栖式AUV路径点跟踪控制系统框图
Figure 4. Block diagram of a benthic AUV waypoint-tracking control system

图 7 基于视线圆的LOS制导律示意图
Figure 7. Schematic diagram of LOS guidance law based on line of sight circle

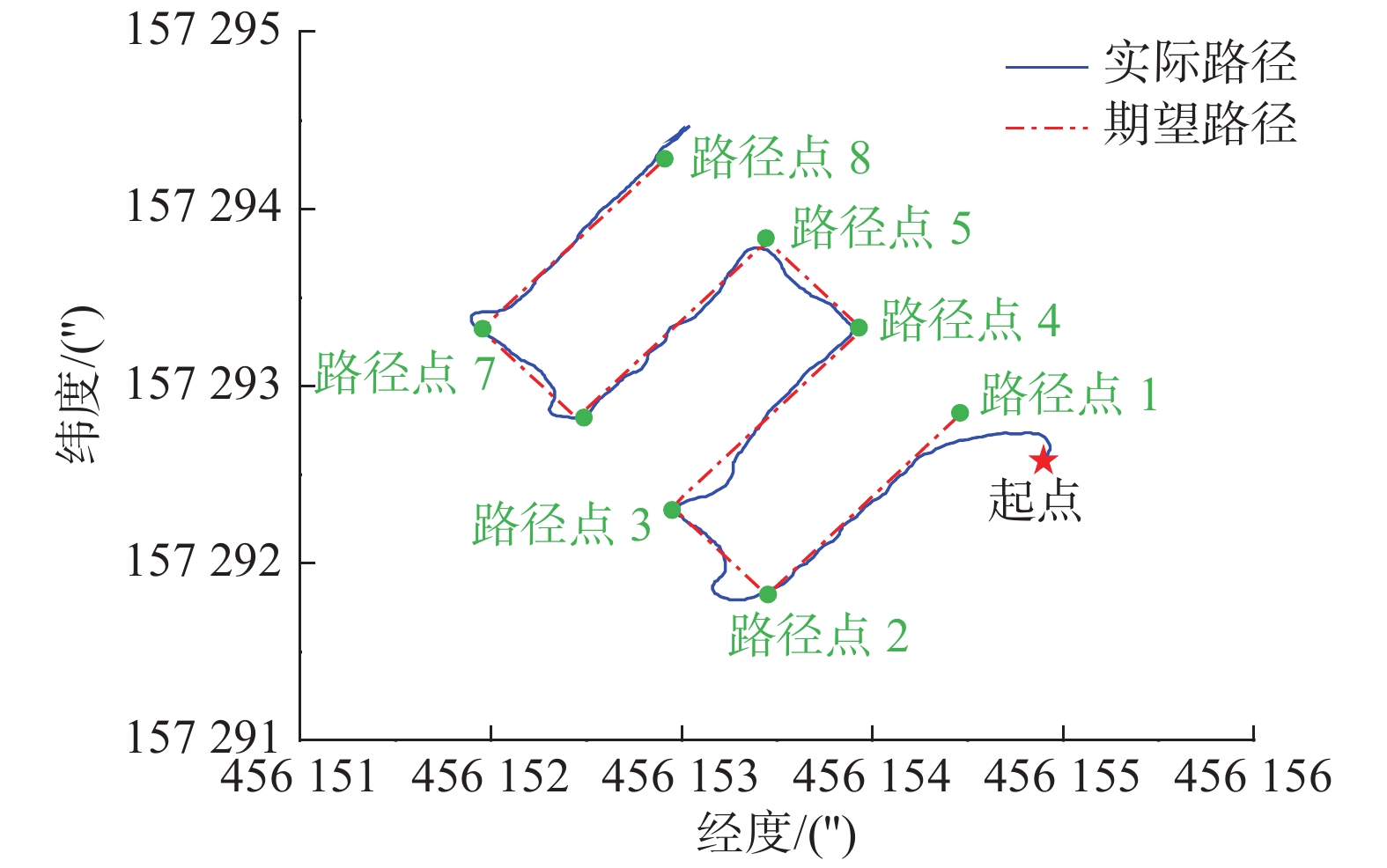
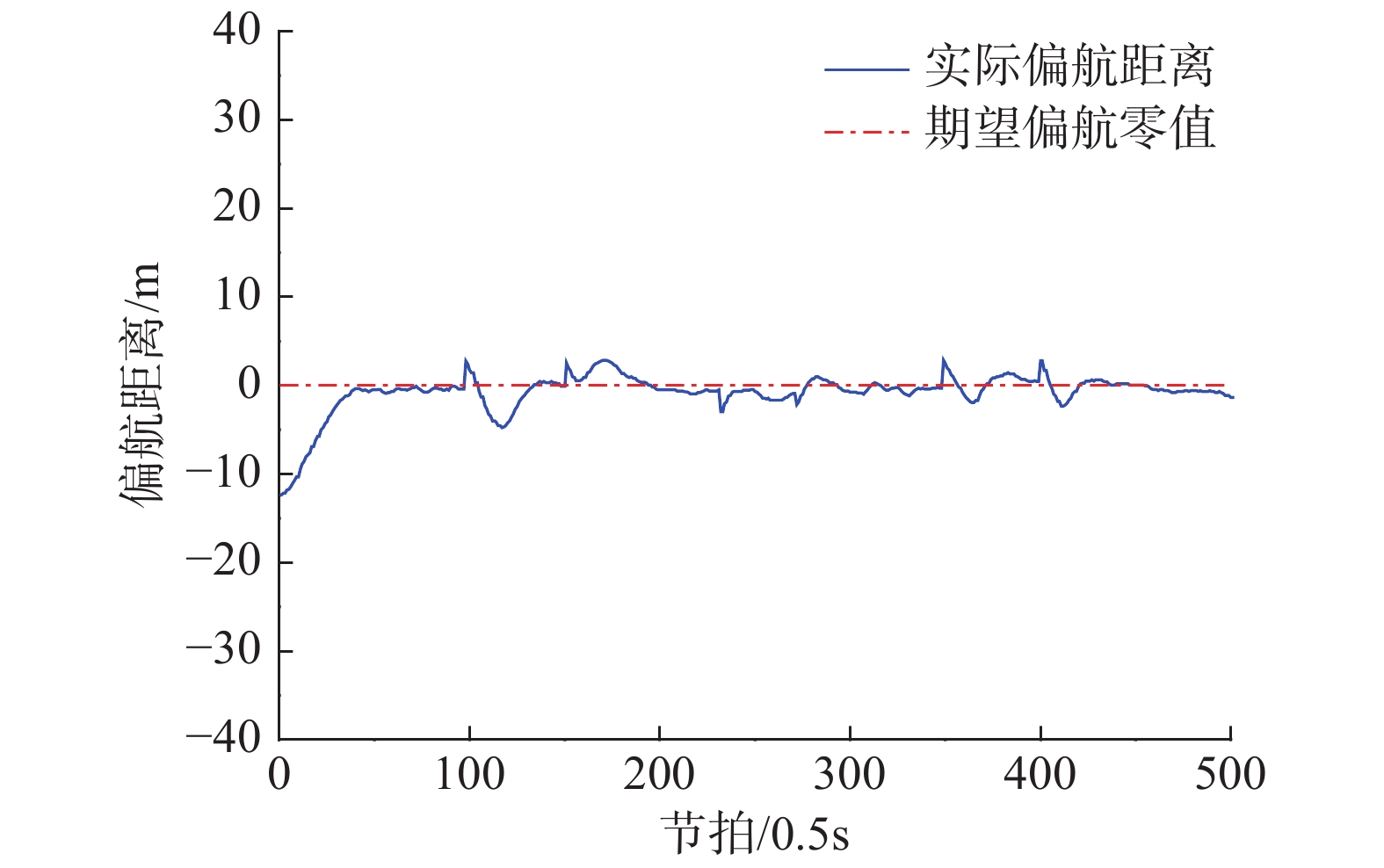
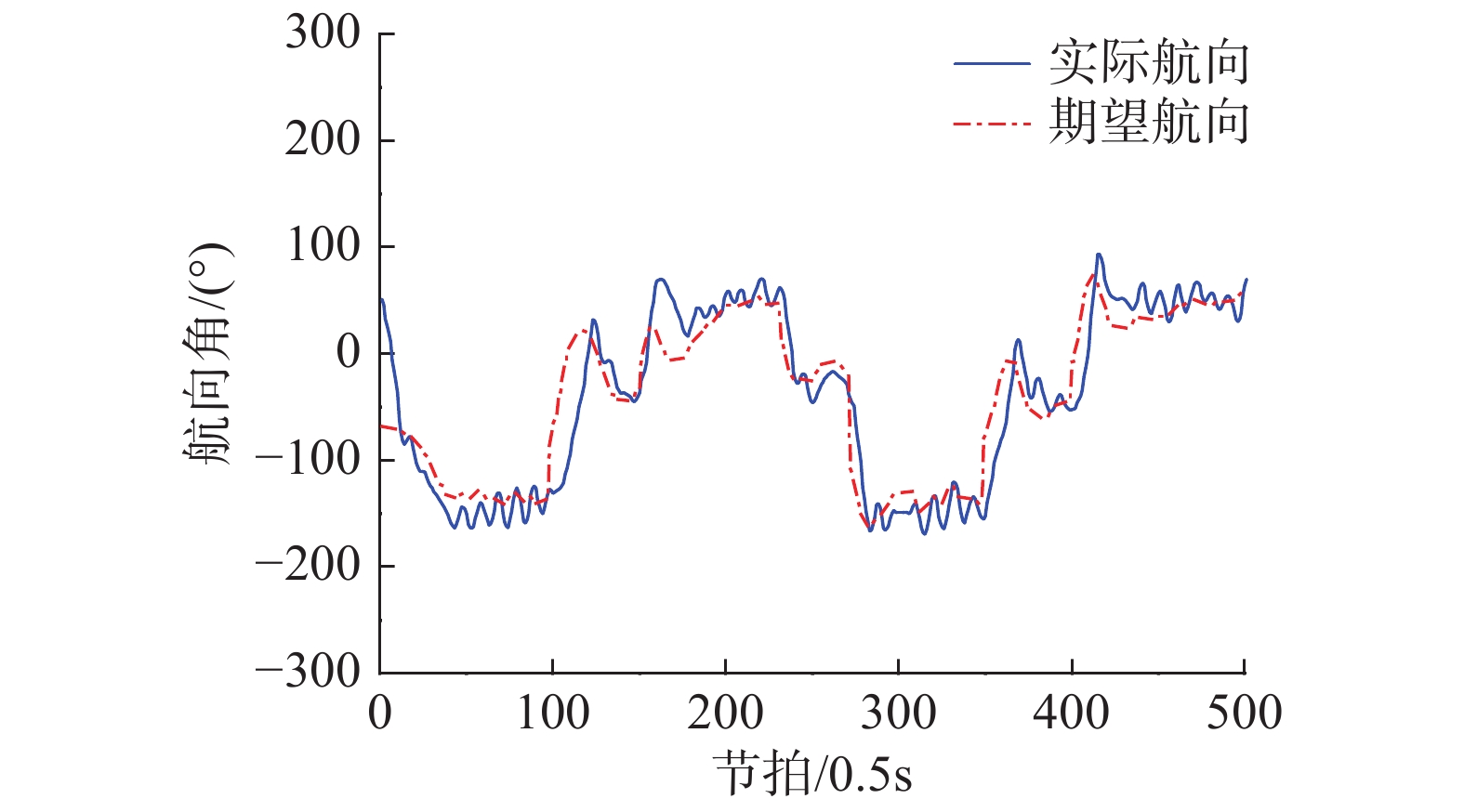
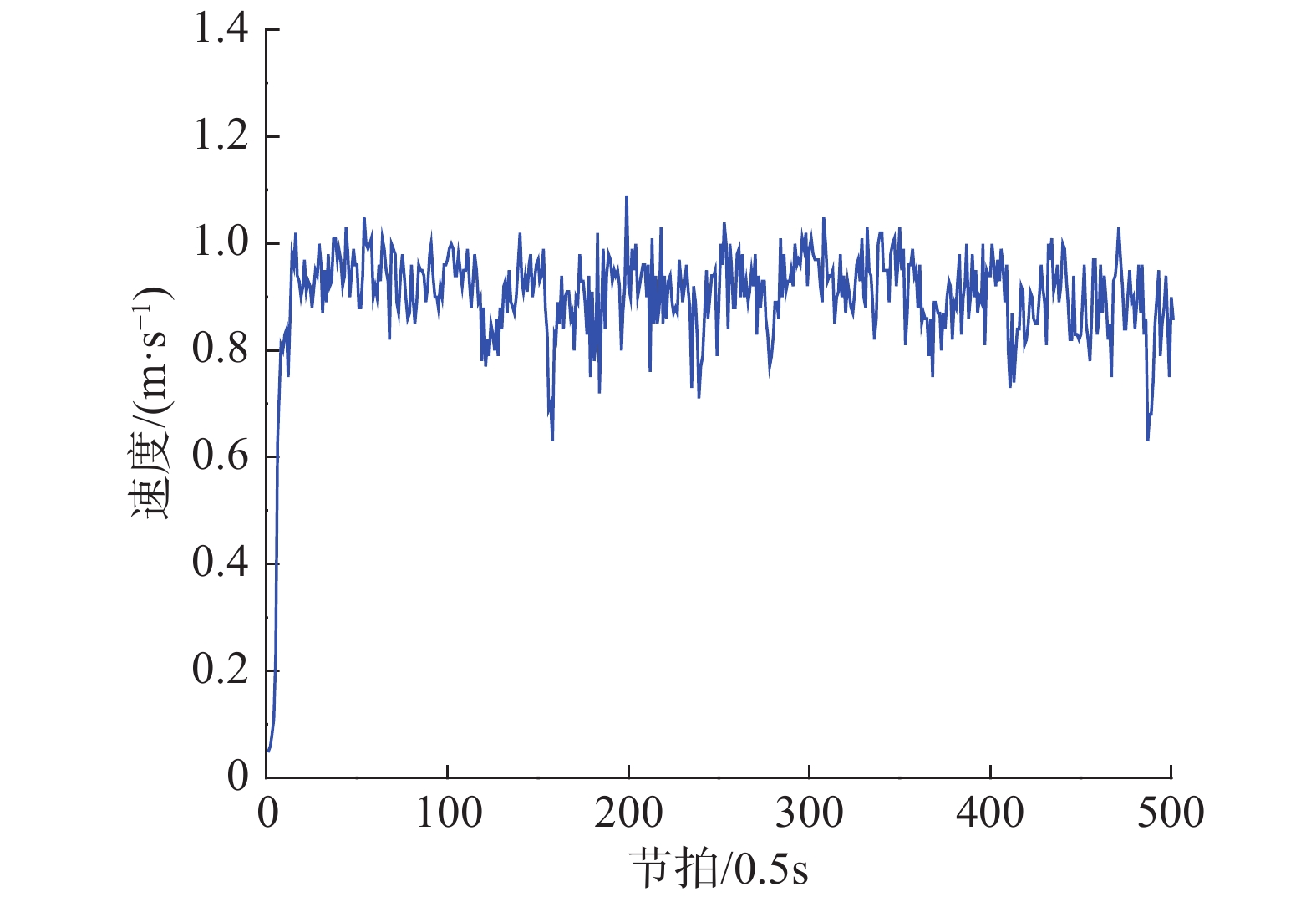
图 13 传统方法下的路径点跟踪控制曲线
Figure 13. Waypoint-tracking control curves under traditional method

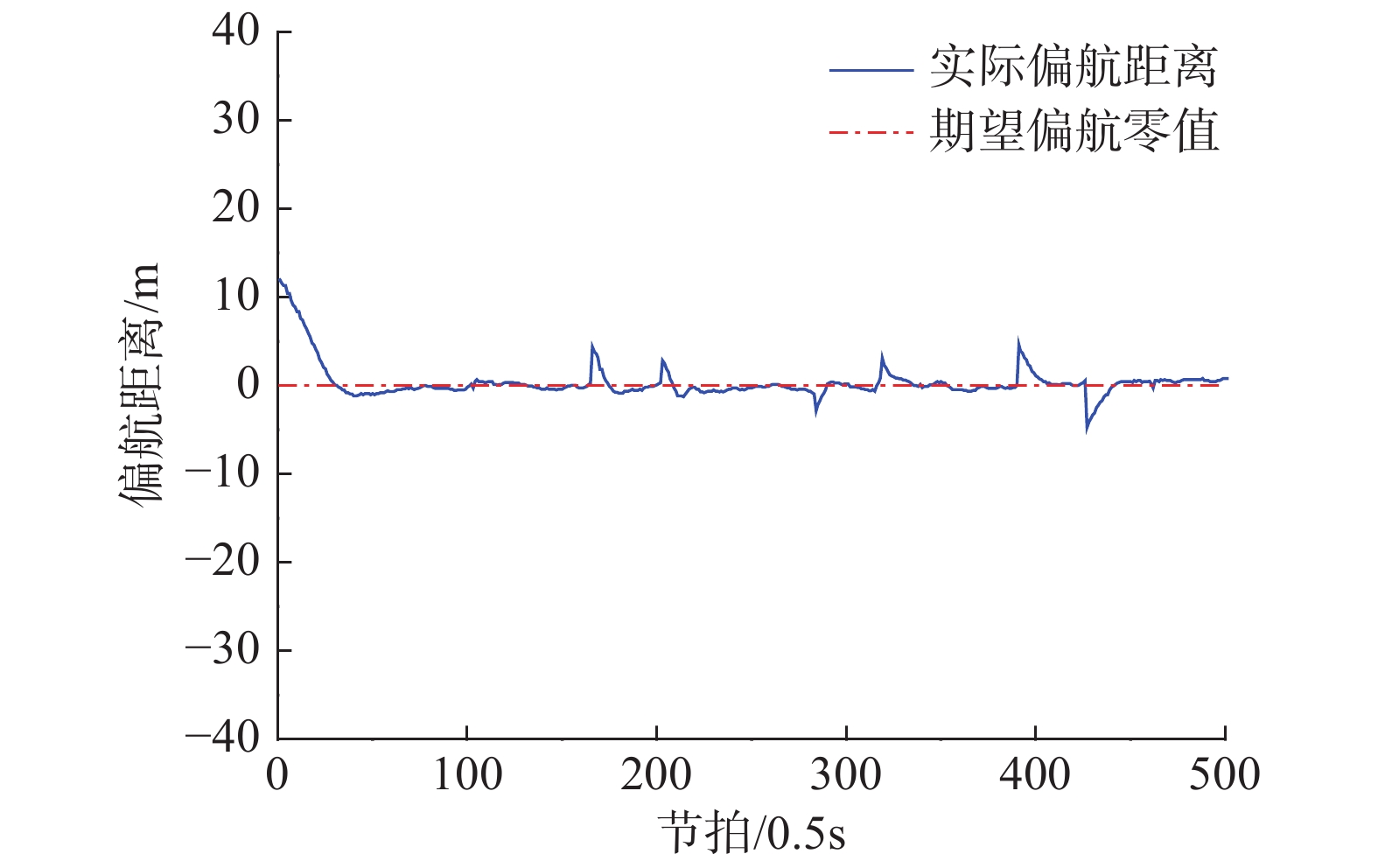
图 17 改进方法下路径点跟踪控制曲线
Figure 17. Waypoint-tracking control curves under the improved method
-
[1] Kanazawa T, Shinohara M, Sakai S, et al. Development of Compact Ocean Bottom Cabled Seismometers System for Spatially Dense Observationon Sea Floor and First Installation Plan[C]//Oceans 2009-Europe. Bremen, Germany: IEEE, 2009: 1-7. [2] Quadt E, Detomo R, Pirmez C, et al. Ocean Bottom Node Seismic at the Deepwater Bonga Field, Nigeria [C]//International Petroleum Technology Conference. Beijing, China: European Association of Geoscientists & Engineers, 2013. [3] Lecerf D, Lafram A, Boelle J, et al. Ocean Bottom Node Processing in Deep Offshore Environment for Reservoir Monitoring[C]//12th International Congress of the Brazilian Geophysical Society & Expogef. Rio de Janeiro, Brazil: Society of Exploration Geophysicists, 2011. [4] Qin H, Wu Z, Zhu Z, et al. Design of a Flying Node AUV for Ocean Bottom Seismicobservations[C]//2018 Oceans-MTS/ IEEE Kobe Techno-Oceans(OTO). Kobe, Japan: IEEE, 2018. [5] Holloway A, Grant D, Watts G, et al. The Future of Deepwater Ocean Bottom Seismic Are Flying Nodes the Next Big Step[C]//SEG International Exposition and Annual Meeting. New Orleans, Louisiana: Society of Exploration Geophysicists, 2015: 115-119. [6] Qin H D, Wu Z Y, Sun Y C, et al. Prescribed Performance Adaptive Fault-tolerant Trajectory Tracking Control for an Ocean Bottom Flying Node[J]. Int. J Adv. Robot Syst., 2019, 16(3): 13. [7] Abdurahman B, Savvaris A, Tsourdos A. A Switching LOS Guidance with Relative Kinematics for Path-Following of Underactuated Underwater Vehicles[J]. Ifac Papersonline, 2017, 50(1): 2290-5. doi: 10.1016/j.ifacol.2017.08.228 [8] Huang X, Li Y, Du F, et al. Horizontal Path Following for Underactuated AUV Based on Dynamic Circle Guidance[J]. Robotica, 2017, 35(4): 876-91. doi: 10.1017/S0263574715000867 [9] Elmokadem T, Zribi M, Youcef-Toumi K. Control for Dynamic Positioning and Way-point Tracking of Underactuated Autonomous Underwater Vehicles Using Sliding Mode Control[J]. J. Intell Robot Syst., 2019, 95(3-4): 1113-32. doi: 10.1007/s10846-018-0830-8 [10] Hou Z, Jin S. A Novel Data-driven Control Approach for a Class of Discrete-time Nonlinear Systems[J]. IEEE Trans. Control Syst. Technol, 2011, 19(6): 1549-1558. doi: 10.1109/TCST.2010.2093136 [11] Li H, Zheng S, Ren H. Self-correction of Commutation Point for High-speed Sensorless BLDC Motor with Low Inductance and Nonideal Back EMF[J]. IEEE Trans. Power Electron., 2017, 32(1): 642-651. doi: 10.1109/TPEL.2016.2524632 [12] Lu C, Zhao Y, Men K, et al. Wide-area Power System Stabiliser Based on Model-free Adaptive Control[J]. Control Theory Appl., 2015, 9(13): 1996-2007. doi: 10.1049/iet-cta.2014.1289 [13] Li Z, Xia Y, Qu Z. Data-driven Background Representation Method to Video Surveillance[J]. Opt. Soc. Amer. A, Opt. Image Sci., 2017, 34(2): 193-202. doi: 10.1364/JOSAA.34.000193 [14] Tian T T, Hou Z S, Liu S D, et al. Model-free Adaptive Control Based Lateral Control of Self-driving Car[J]. Acta Autom. Sin., 2017, 43(1): 1931-1940. [15] 田涛涛, 侯忠生, 刘世达, 等. 基于无模型自适应控制的无人驾驶汽车横向控制方法[J]. 自动化学报, 2017, 43(11): 1931-1940.Tian Tao-tao, Hou Zhong-sheng, Liu Shi-da, et al. Model-free Adaptive Control Based Lateral Control of Self-driving Car[J]. Acta Automatica Sinica, 2017, 43(11): 1931-1940. [16] 夏青元, 徐锦法, 张梁. 倾转旋翼飞行器无模型自适应姿态控制[J]. 系统工程与电子技术, 2013, 35(1): 146-151.Xia Qing-yuan, Xu Jin-fa, Zhang Liang. Model-free Adaptive Attitude Controller for a Tilt-rotor Aircraft[J]. Systems Engineering and Electronics, 2013, 35(1): 146-151. [17] Xu D, Jiang B, Shi P. A Novel Model-free Adaptive Control Design for Multivariable Industrial Processes[J]. IEEE Trans. Ind. Electron., 2014, 61(11): 6391-6398. doi: 10.1109/TIE.2014.2308161 [18] Hou Z S, Xiong S S. On Model-Free Adaptive Control and Its Stability Analysis[J]. IEEE Trans Autom Control, 2019, 64(11): 4555-69. doi: 10.1109/TAC.2019.2894586 [19] Liao Y L, Jiang Q Q, Du T P, et al. Redefined Output Model-Free Adaptive Control Method and Unmanned Surface Vehicle Heading Control[J]. IEEE J Ocean Eng, 2020, 45(3): 714-23. doi: 10.1109/JOE.2019.2896397 -

 下载:
下载:










 点击查看大图
点击查看大图

计量
- 文章访问数: 2481
- HTML全文浏览量: 65
- PDF下载量: 61
- 被引次数: 0




