

Research on Influence of Operating Depth on Motion State of Underwater Gliders
-
摘要: 驱动水下滑翔机运动的净浮力约占水下排水量的0.5%, 其微小变化都会对滑翔运动状态产生重要影响。滑翔过程中, 随深度而变化的海水密度和压力会导致排水量发生变化, 引起净浮力变化, 进而影响水下滑翔机的稳定运动状态。文中利用动力平衡方程研究净浮力变化对稳态滑翔运动状态的影响, 将排水量随深度变化的数学模型和动力学模型相结合, 通过仿真研究滑翔深度对滑翔运动状态的影响。研究表明: 因深度影响, 水下滑翔机的运动是动态平衡的滑翔运动, 而非稳定的平衡滑翔运动; 排水量-深度变化主要影响滑翔速度, 对滑翔姿态影响相对较小; 没有额外调节时, 下潜阶段滑翔速度先减小后增加, 上浮阶段先增加后减小; 此外, 可以通过功耗比较小的内部滑动质量的调节平衡净浮力变化对滑翔姿态的影响。文中的工作可为使用滑翔机进行精准控制开展海洋环境监测和探测提供参考。Abstract: Net buoyancy, which drives underwater gliders, accounts for approximately 0.5% of their displacement, and its small change may significantly affect the state of their motion. During the gliding process, the displacement changes dynamically owing to the variation in seawater density and pressure with depth, thus resulting in a change in net buoyancy that would then affect the steady state of gliding. In this study, the effect of the change in net buoyancy on the steady state of the gliding motion was studied based on the dynamic equilibrium equation. By combining the mathematical and dynamical models of displacement change with depth the influence of depth on the gliding motion state was studied through simulations. The results show that: 1) the actual motion of underwater gliders under the influence of depth is dynamically balanced gliding, instead of steady balanced gliding; 2) the displacement-depth variation affects the gliding speed with a marginal effect on gliding attitude; 3) without additional control, gliding speed decreases first and then increases in the diving stage, and increases first and then decreases in the rising stage; and 4) the influence of the change in net buoyancy on gliding attitude could be eliminated by adjusting the position of the internal sliding mass, which requires little power. This study provides a reference for the precise control of underwater gliders used in marine environment monitoring and detection.
-
Key words:
- underwater glider /
- gliding motion /
- net buoyancy /
- depth
-
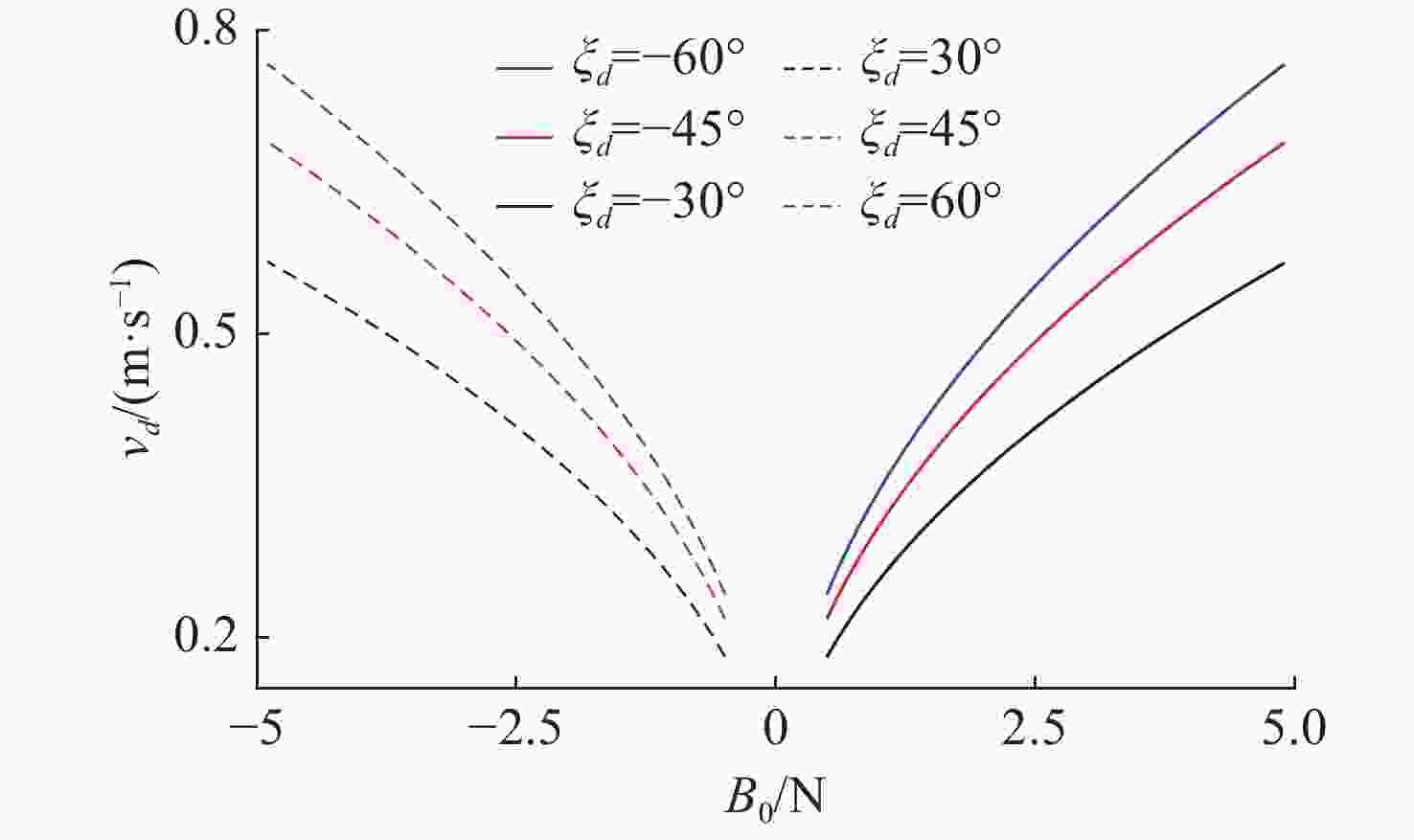
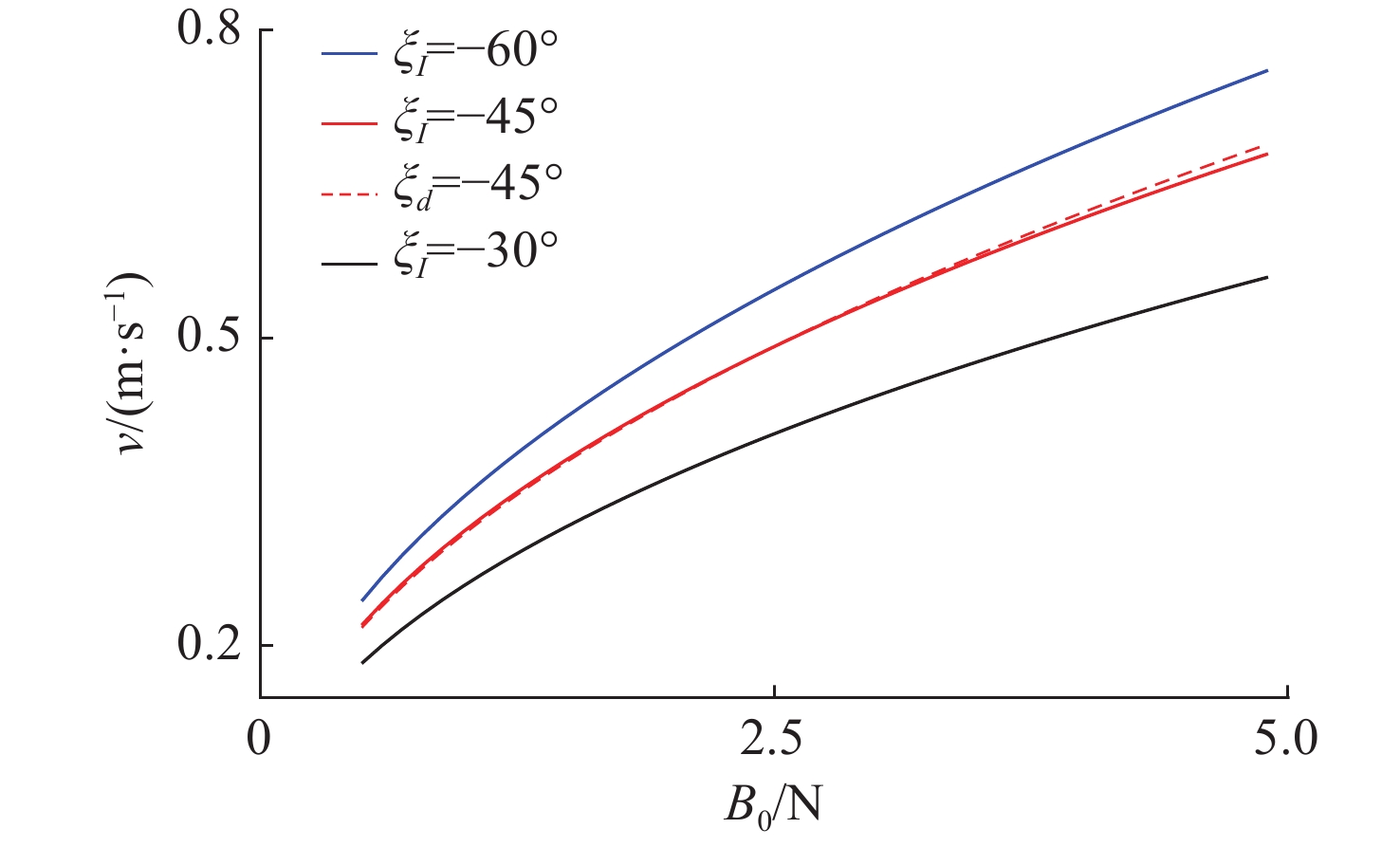
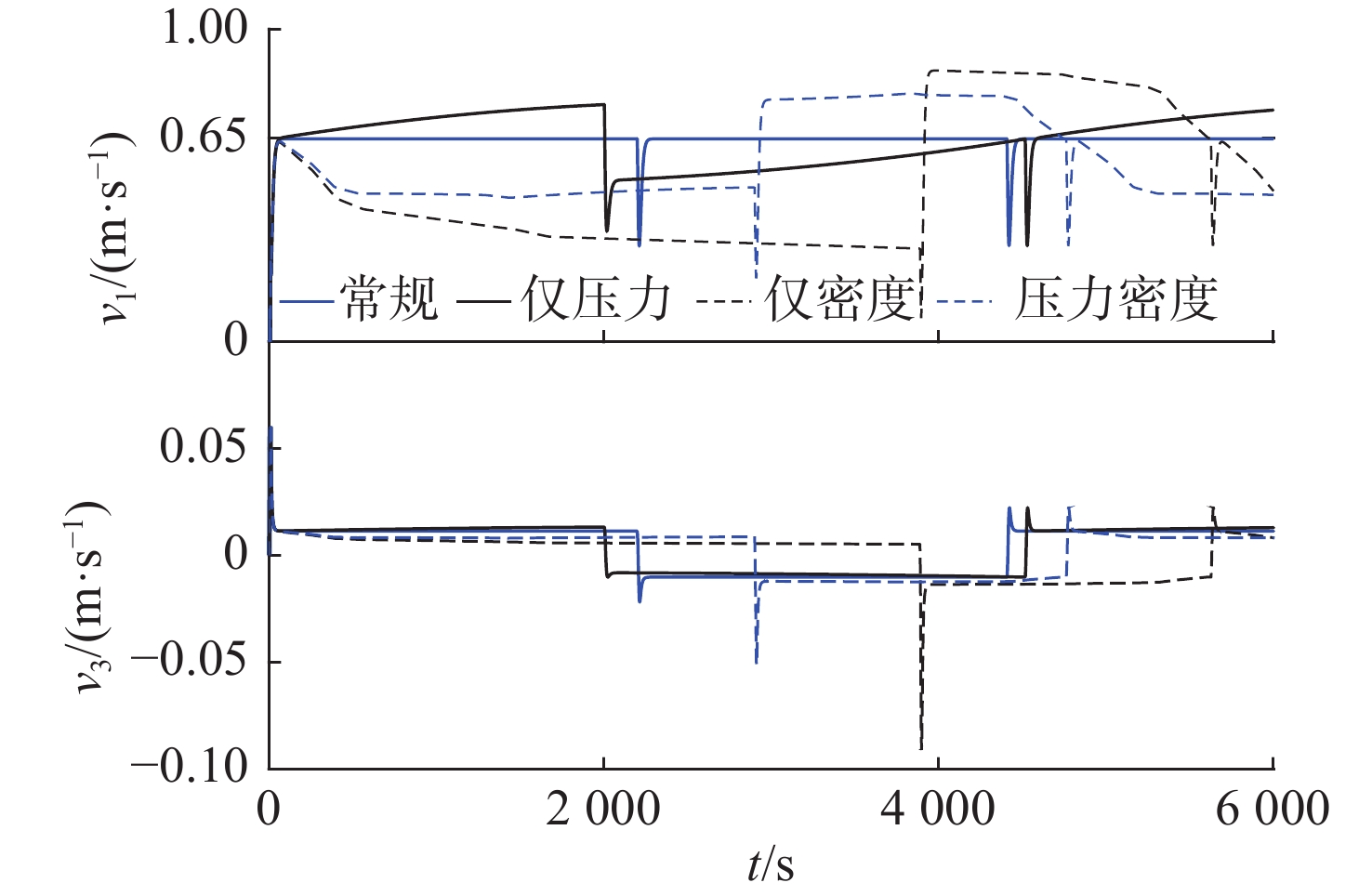
图 2 速度随净浮力变化曲线(工况1)
Figure 2. Curves of velocity changing with net buoyancy (condition 1)
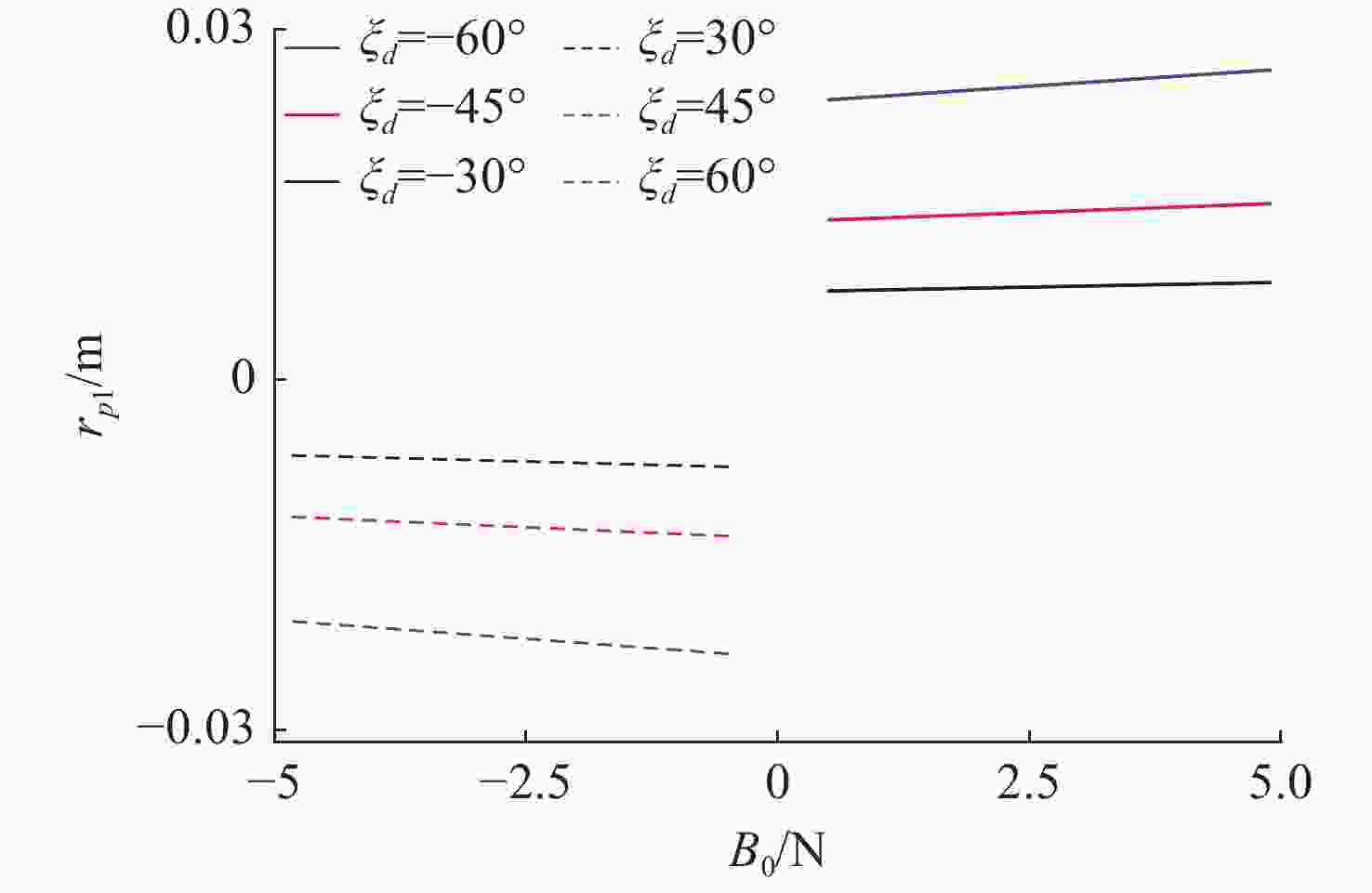
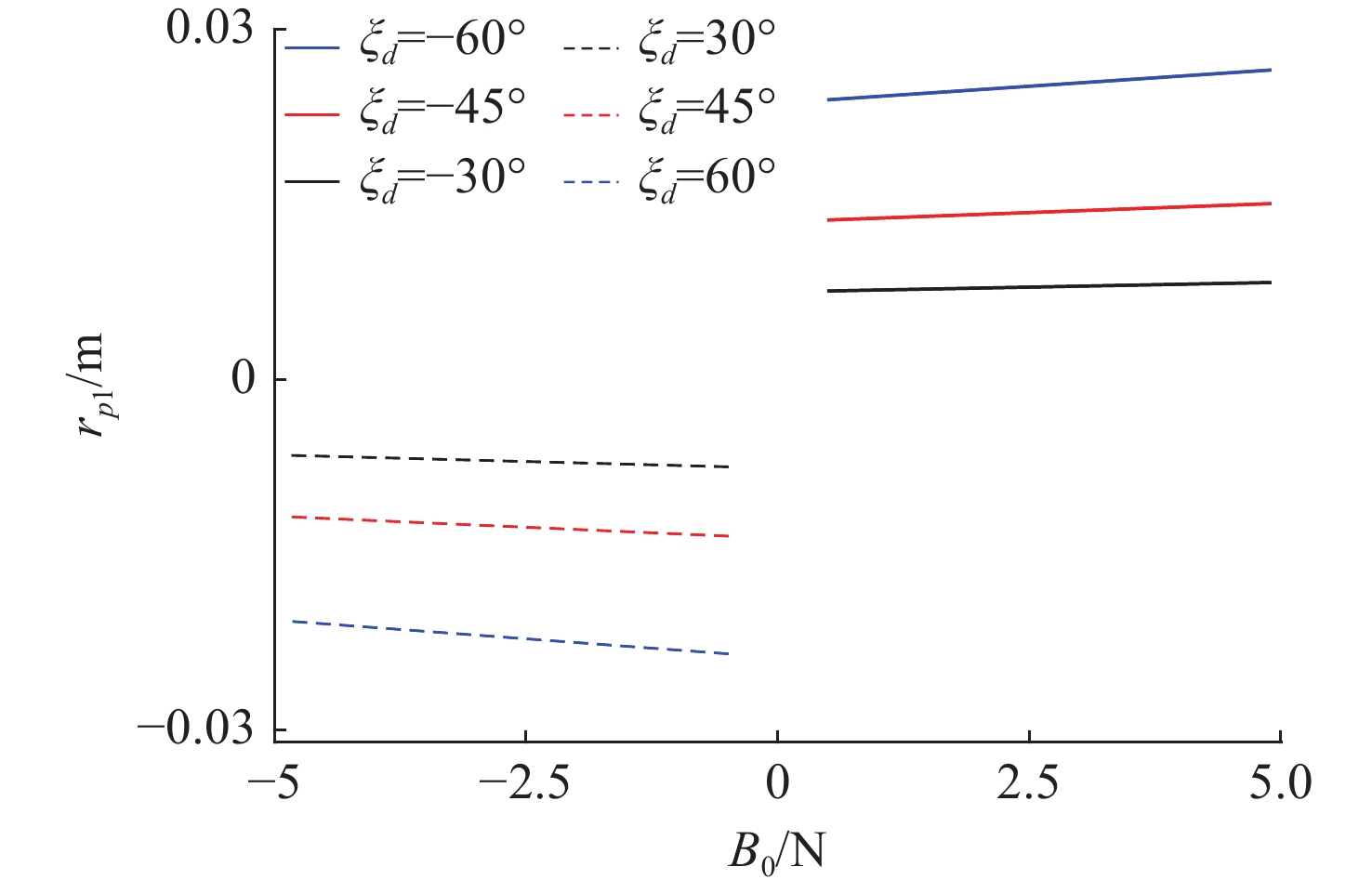
图 3 滑动质量位移随净浮力变化情况(工况1)
Figure 3. Curves of sliding mass position changing with net buoyancy(condition 1)
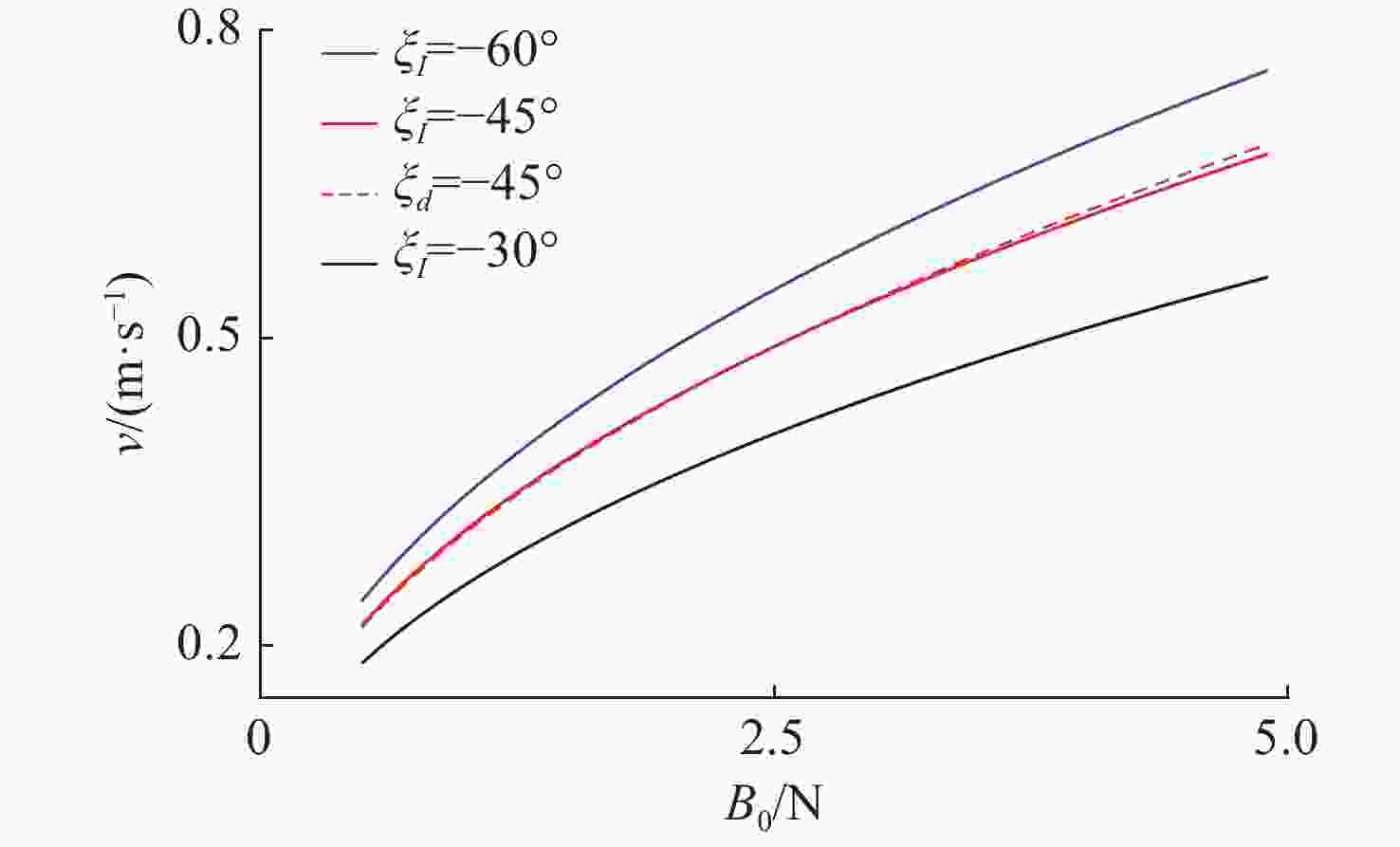
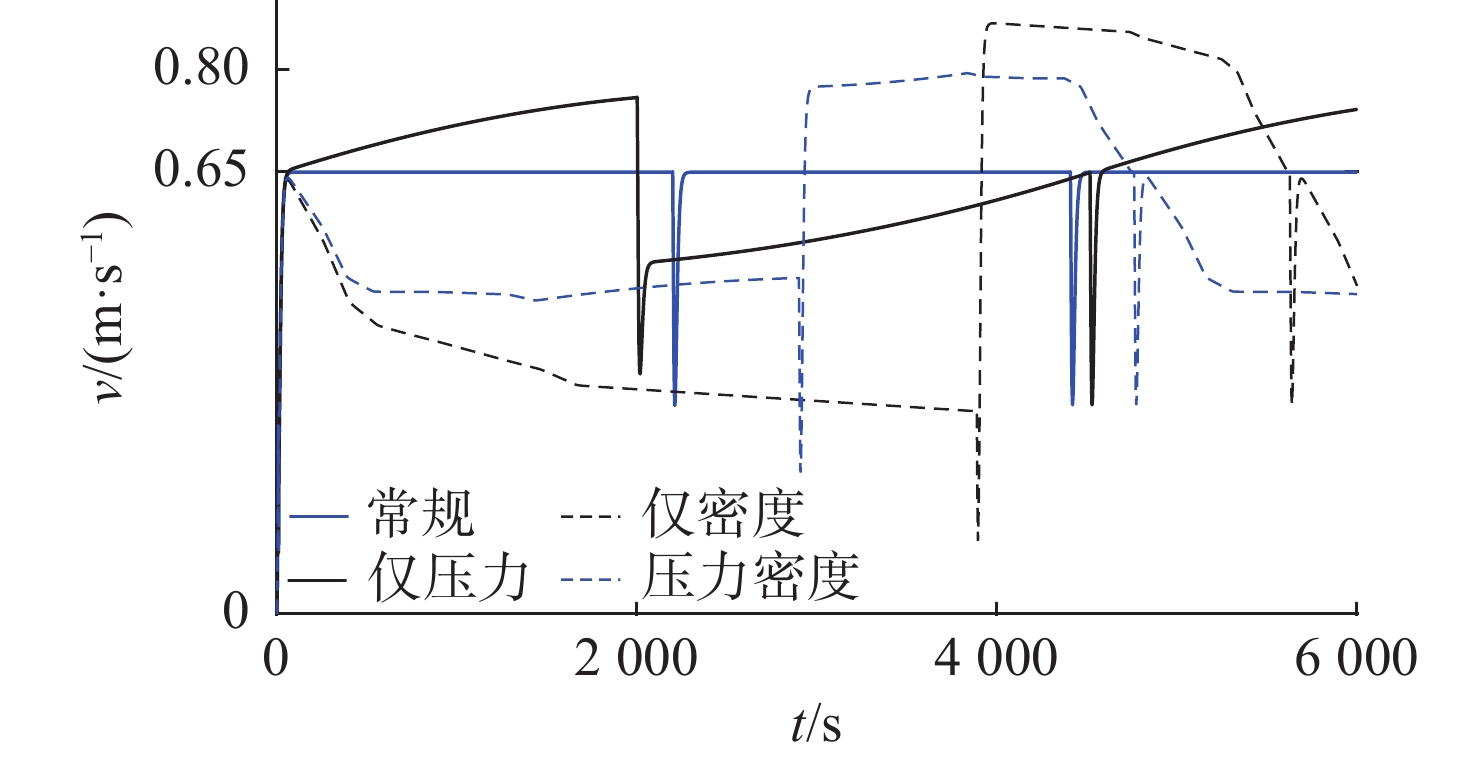
图 4 速度随净浮力变化曲线(工况2)
Figure 4. Curves of velocity changing with net buoyancy(condition 2)

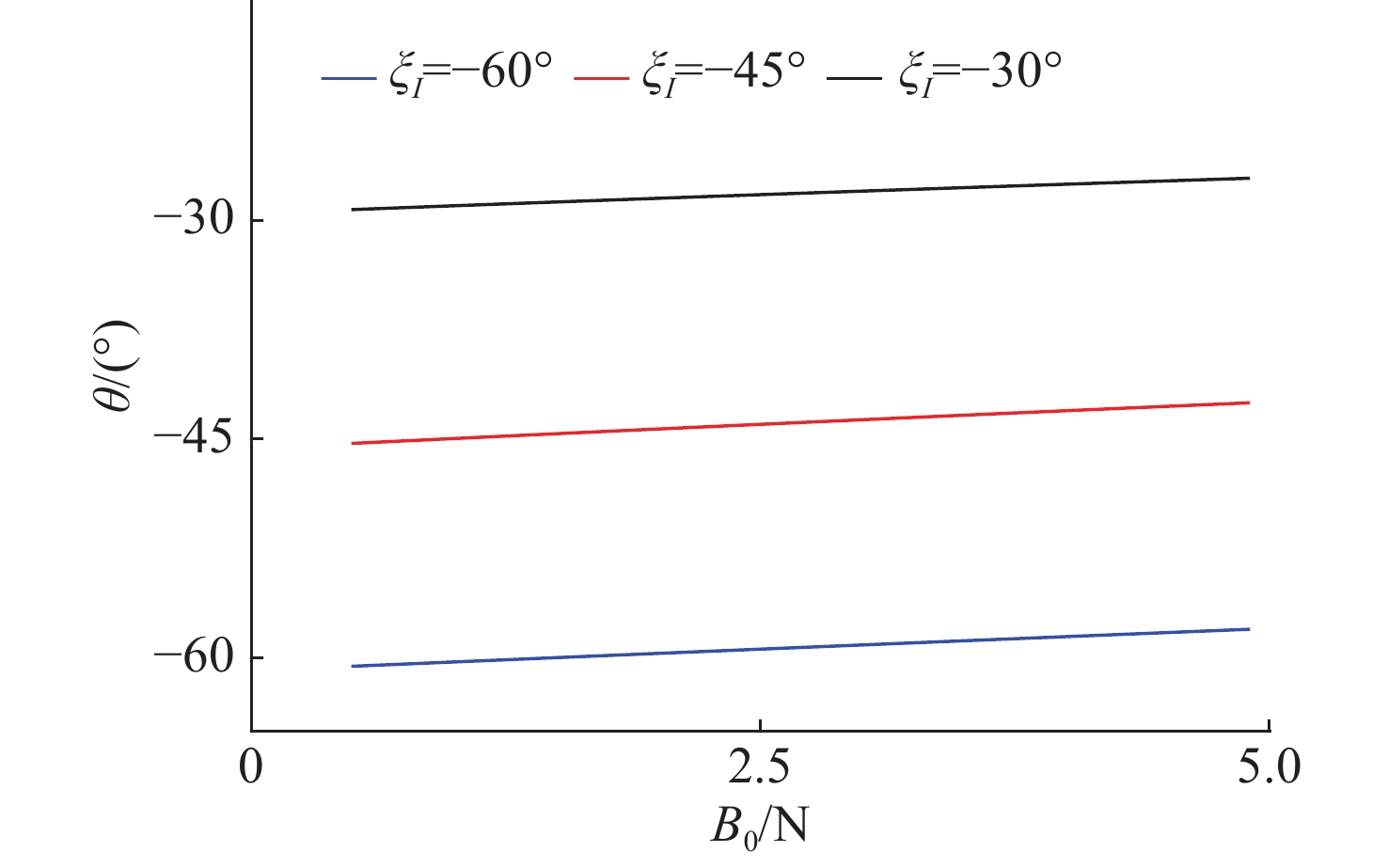
图 5 净浮力与姿态角的变化情况(工况2)
Figure 5. Curves of attitude angle changing with net buoyancy (condition 2)

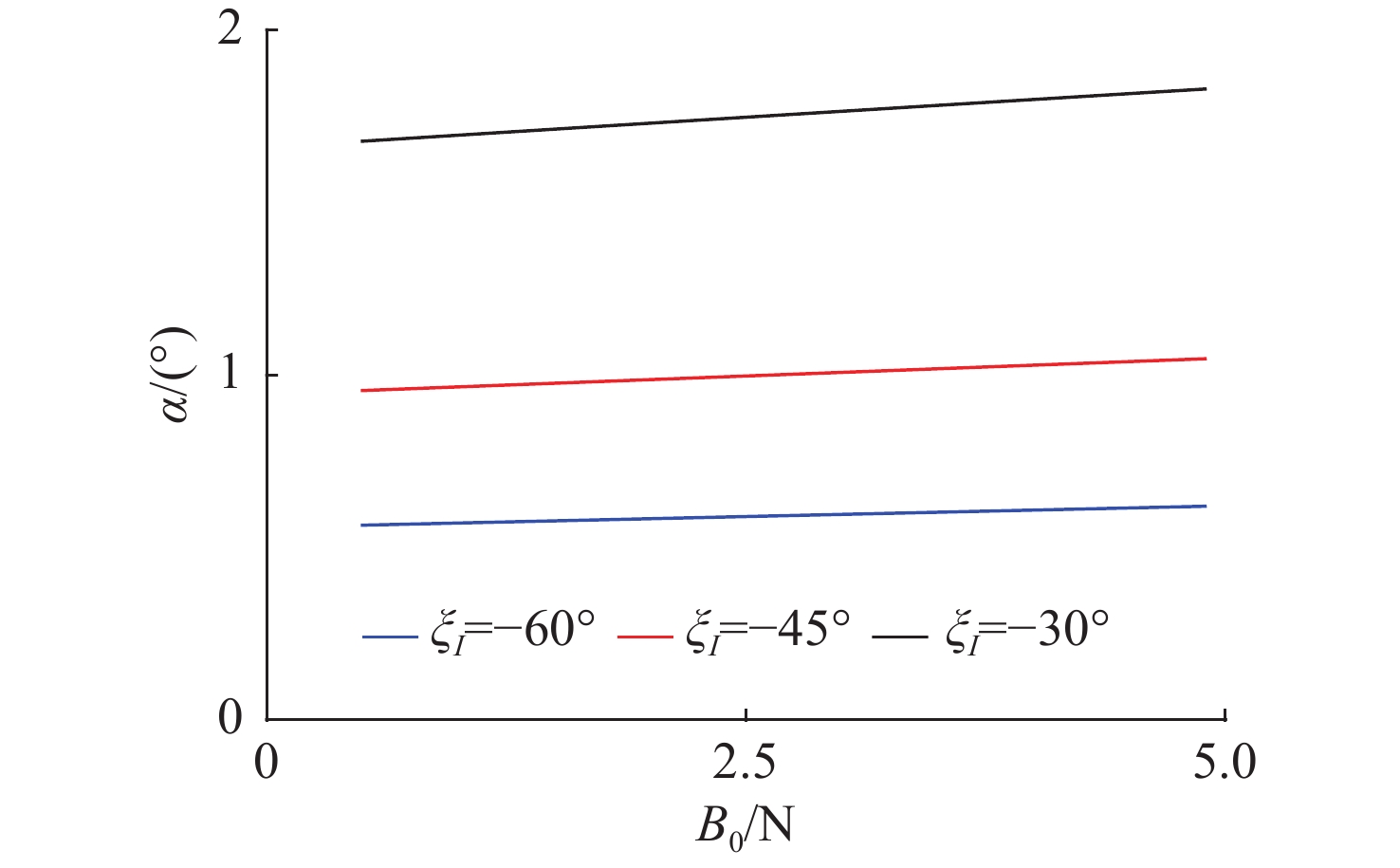
图 6 攻角随净浮力变化情况(工况2)
Figure 6. Curves of attack angle changing with net buoyancy (condition 2)
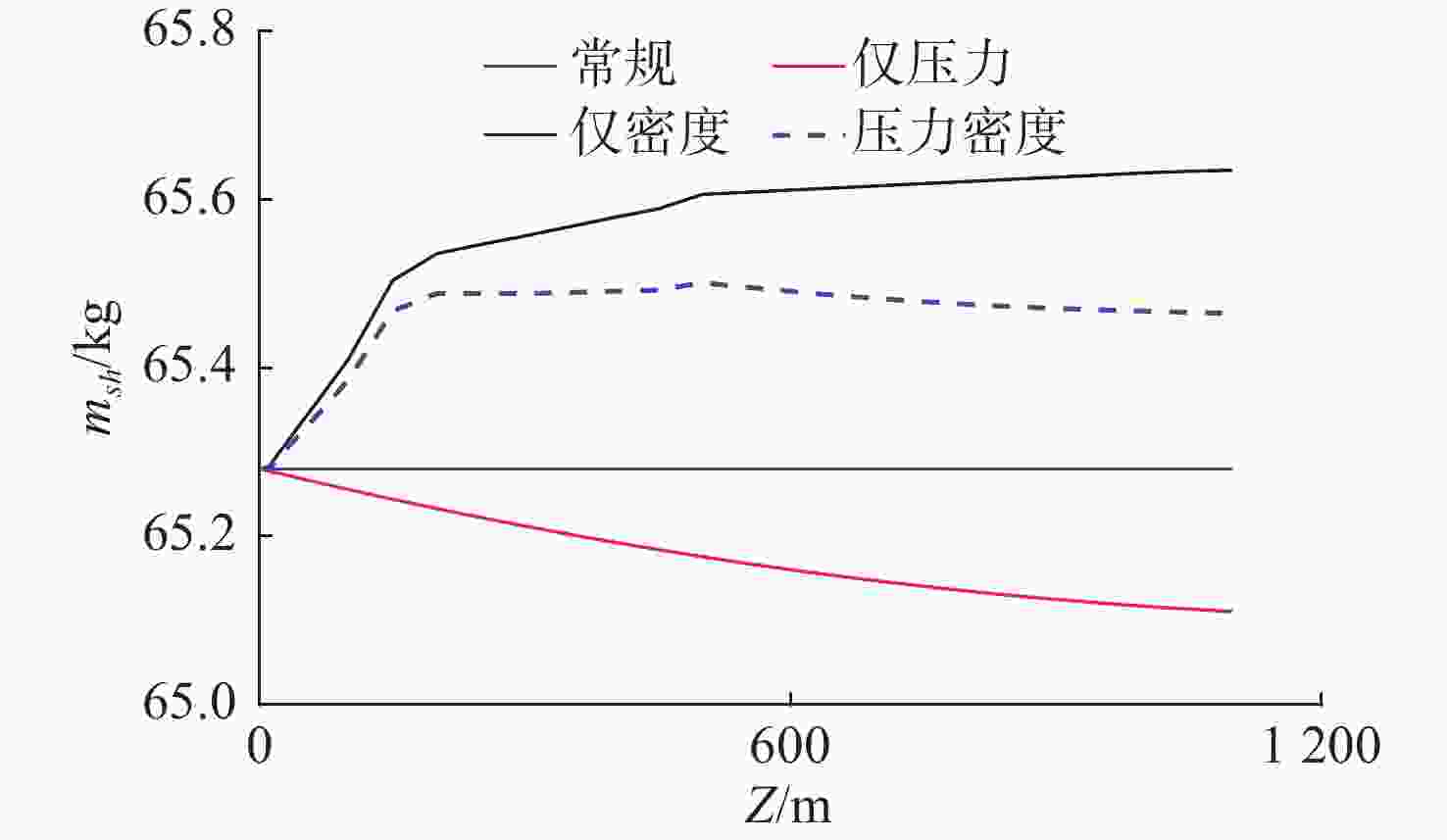
图 7 滑翔机水下排水量随深度变化曲线
Figure 7. Curves of underwater glider displacement changing with depth
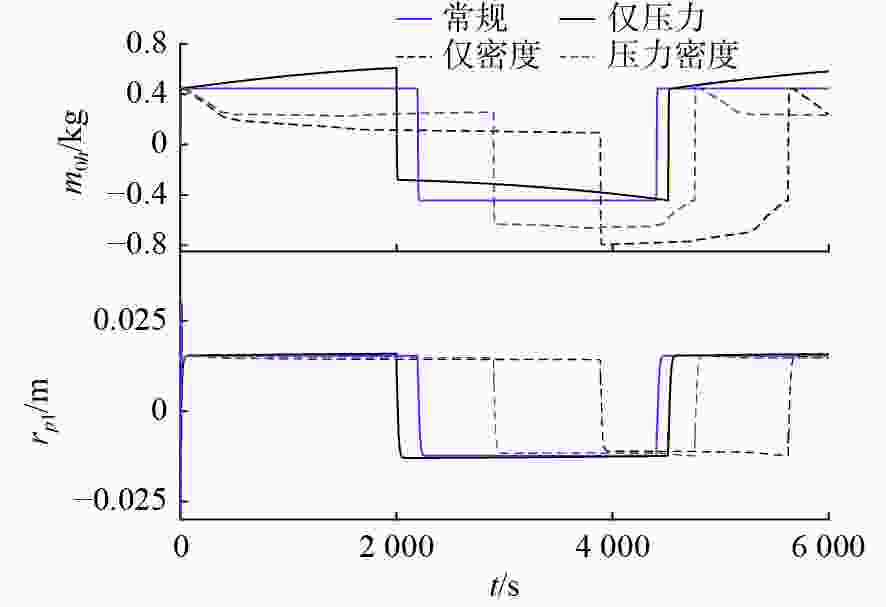
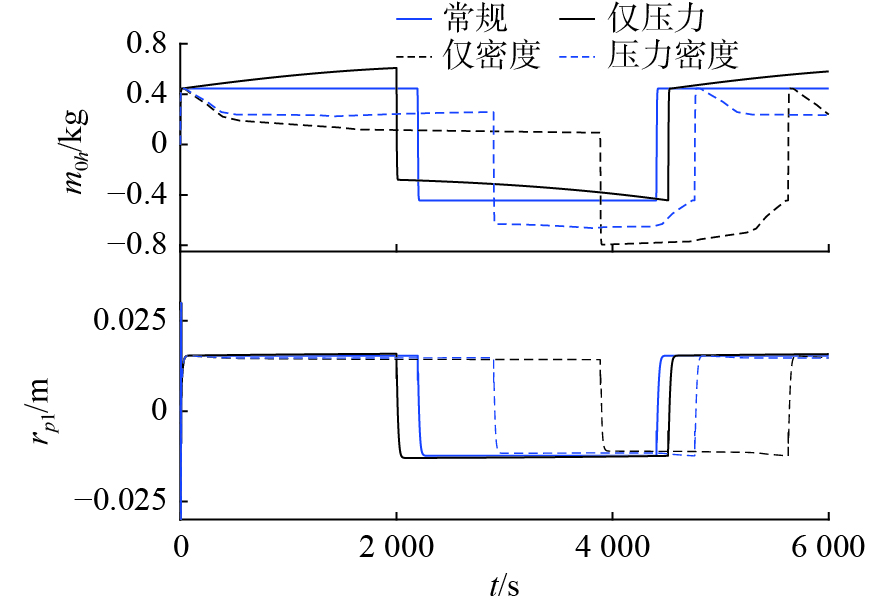
图 8 净浮力等效质量和滑动质量位移仿真结果
Figure 8. Simulation results of net buoyancy equivalent mass and sliding mass position
-
[1] 钱洪宝, 卢晓亭. 我国水下滑翔机技术发展建议与思考[J]. 水下无人系统学报, 2019, 27(5): 474-479. doi: 10.11993/j.issn.2096-3920.2019.05.001Qian Hong-bao, Lu Xiao-ting. Technical Development of Underwater Glider in China: Suggestions and Thoughts[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 474-479. doi: 10.11993/j.issn.2096-3920.2019.05.001 [2] Kang J, Jeoung S K, Oh J Y, et al. An Analysis of Carbon Fiber Hull Structure of a New Underwater Glider[J]. International Journal of Modern Physics B, 2018, 32(19): 1-6. [3] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.Shen Xin-rui, Wang Yan-hui, Yang Shao-qiong, et al. Development of Underwater Gliders: An Overview and Prospect[J]. Journal of Unmanned Undersea Systems, 2018, 26(2): 89-106. [4] 杨燕, 孙秀军, 王延辉. 浅海型水下滑翔机技术研究现状分析[J]. 海洋技术学报, 2015, 34(4): 7-14.Yang Yan, Sun Xiu-jun, Wang Yan-hui. Analysis on the State-of-the-Art Shallow Water Underwater Gliders[J]. Journal of Ocean Technology, 2015, 34(4): 7-14. [5] Leonard N E, Graver J G. Model-based Feedback Control of Autonomous Underwater Gliders[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 633-645. doi: 10.1109/48.972106 [6] Latifa U, Putri T W O, Trilaksono B R, et al. Modelling, Identification, and Simulation of Autonomous Underwater Glider in Longitudinal Plane for Control purpose[C]//2017 2nd International Conference on Control and Robotics Engineering (ICCRE), Bangkok: ICCRE, 2017. [7] Cao J J, Cao J L, Hu Y L, et al. LQR Control of a Three Dimensional Underwater Glider[J]. Journal of Ship Mechanics, 2019, 23(6): 674-682. [8] 孙秀军, 王磊, 桑宏强. Petrel-Ⅱ 200 水下滑翔机动力学建模与仿真[J]. 水下无人系统学报, 2019, 27(5): 480-487.Sun Xiu-jun, Wang Lei, Sang Hong-qiang. Dynamic Modeling and Simulation of Underwater Glider Petrel-II 200[J]. Journal of Ocean Technology, 2019, 27(5): 480-487. [9] 陈宇航, 严卫生, 高剑, 等. 水下滑翔机纵倾运动的自适应积分反演控制[J]. 兵工学报, 2011, 32(8): 981-985.Chen Yu-hang, Yan Wei-sheng, Gao Jian, et al. Adaptive Integral Backstepping Control for Vertical Pitch Motion of Underwater Gliders[J]. ActaarmamentarII, 2011, 32(8): 981-985. [10] 朱心科, 俞建成, 王晓辉. 能耗最优的水下滑翔机采样路径规划[J]. 机器人, 2011, 33(3): 360-365.Zhu Xin-ke, Yu Jian-cheng, Wang Xiao-hui. Sampling Path Planning of Underwater Glider for Optimal Energy Consumption[J]. Robot, 2011, 33(3): 360-365. [11] Zhang L H, Yan L, Wang Y. Progressive Improvement of Underwater Glider for High Performance[C]//The 17th International Manufacturing Conference. Shenzhen: IMCC, 2017. [12] Yang M, Wang Y, Wang S, et al. Motion Parameter Optimization Forgliding Strategy Analysis of Underwater Gliders[J]. Ocean engineering, 2019, 191: 106502. doi: 10.1016/j.oceaneng.2019.106502 [13] Wang S, Li H, Wang Y, et al. Dynamic Modeling and Motion Analysis for a Dual-buoyancy-driven Full Ocean Depth Glider[J]. Ocean Engineering, 2019, 187: 106163. doi: 10.1016/j.oceaneng.2019.106163 [14] Wang S X, Yang M, Wang Y H, et al. Optimization of Flight Parameters for Petrel-L Underwater Glider[J]. IEEE Journal of Oceanic Engineering, 2021, 46(3): 817-828. doi: 10.1109/JOE.2020.3030573 [15] Yang Y P, Liu Y H, Wang S X, et al. Evaluation Models and Criteria of Motion Performance for Underwater Gliders[J]. Applied Ocean Research, 2020, 102: 102286. [16] Graver J G, Leonard N E. Underwater Glider Dynamics and Control[C]//Proceedings of the 12th International Symposium on Unmanned Untethered Submersible Technology. Piscataway: IEEE, 2001: 1-14. [17] Zhang S W, Yu J C, Zhang A Q, et al. Spiraling Motion of Underwater Gliders: Modeling, Analysis, and Experimental Results[J]. Ocean Engineering, 2013, 60: 1-13. doi: 10.1016/j.oceaneng.2012.12.023 [18] Graver J G. Underwater Glider: Dynamics, Control, and Design[D]. Princeton, NJ: Princeton University, 2005. [19] 朱俊江, 李三忠, 陆敬安, 等. 南海北部神狐海域地质环境综合调查及科学意义[J]. 地球科学, 2020, 45(4): 1416-1426.Zhu Jun-jiang, Li San-zhong, Lu Jing-an, et al. Scientific Implications and Preliminary Surveying Results of Geological and Physical Oceanography Environment in the Shenhu Area of the Northern South China Sea[J]. Earth Science, 2020, 45(4): 1416-1426. [20] IOC, SCOR, IAPSO. The International Thermodynamic Equation of Seawater-2010: Calculation and Use of Thermodynamic Properties[M]//Intergovernmental Oceanographic Commission, Manuals and Guides56. [S.l.]: UNESCO, 2010. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 2128
- HTML全文浏览量: 9
- PDF下载量: 35
- 被引次数: 0




