摘要:
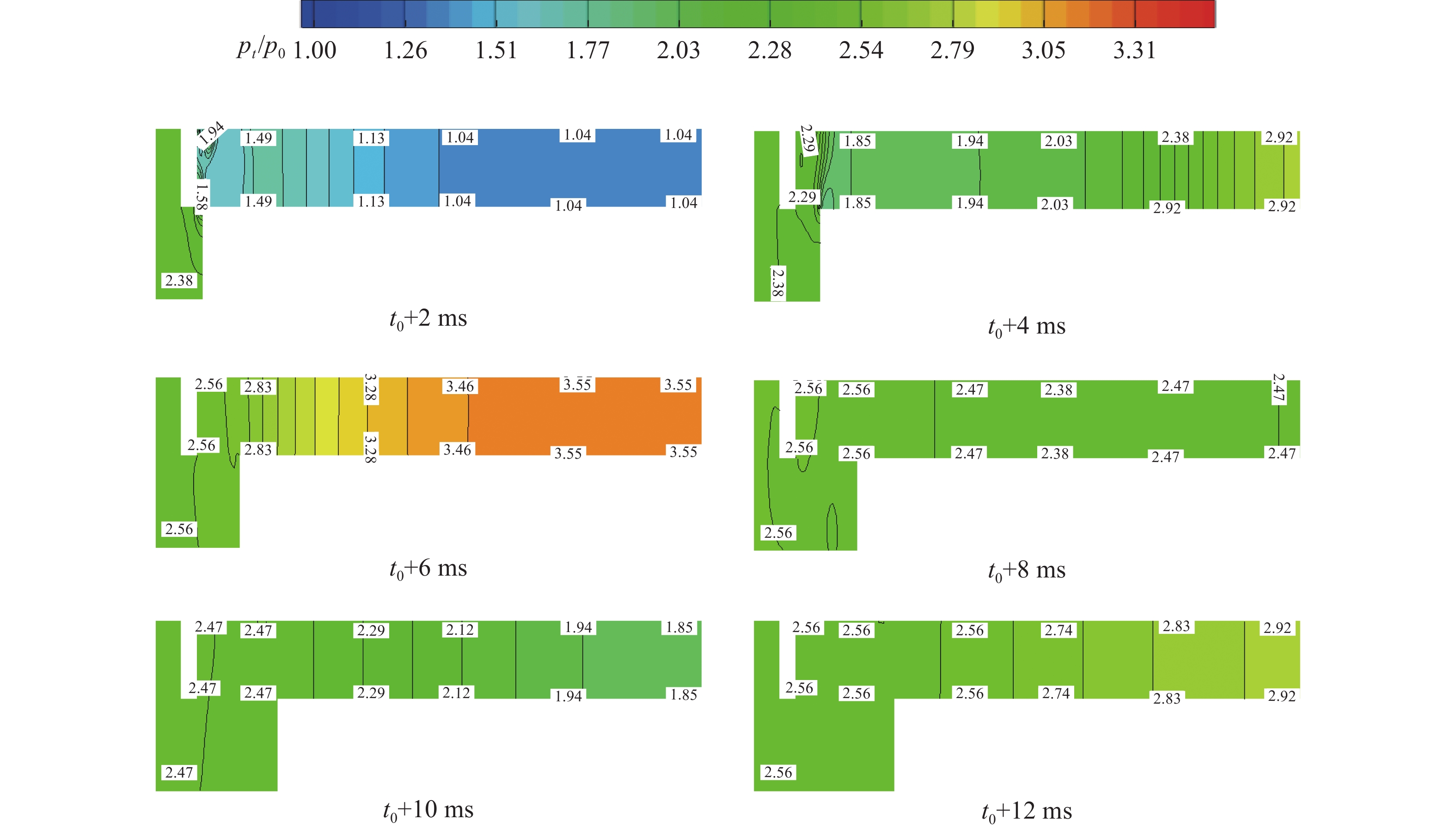
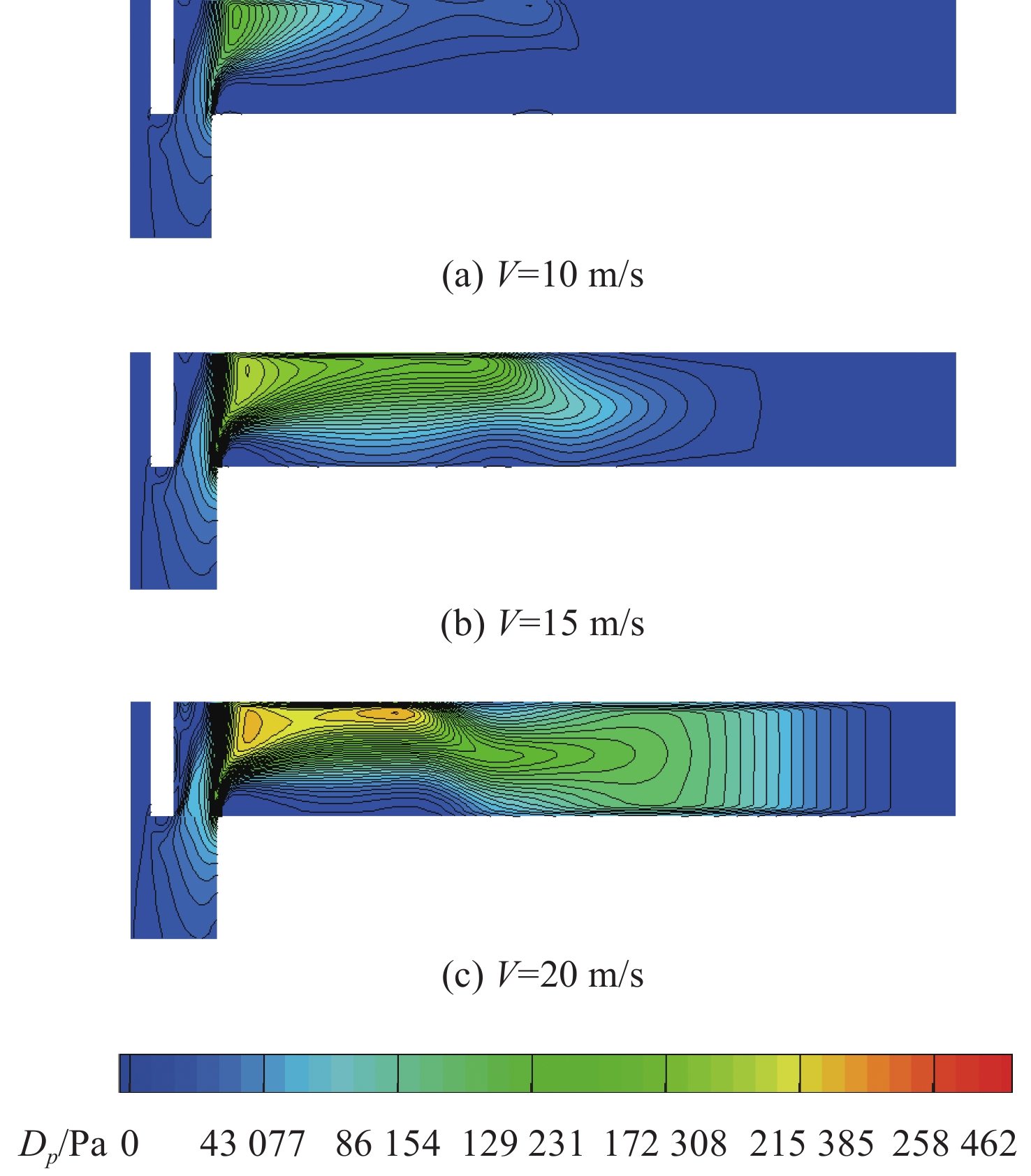
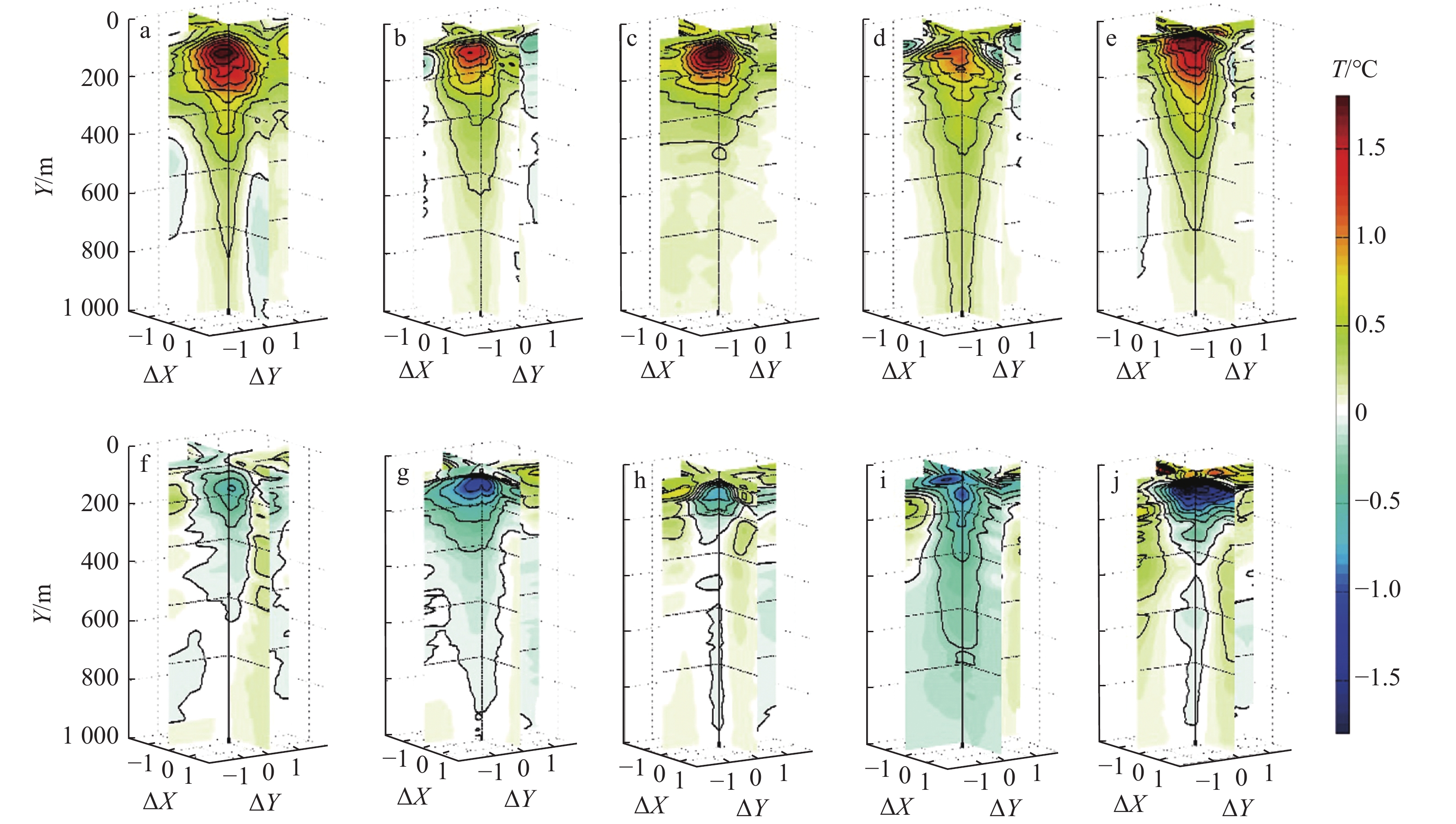
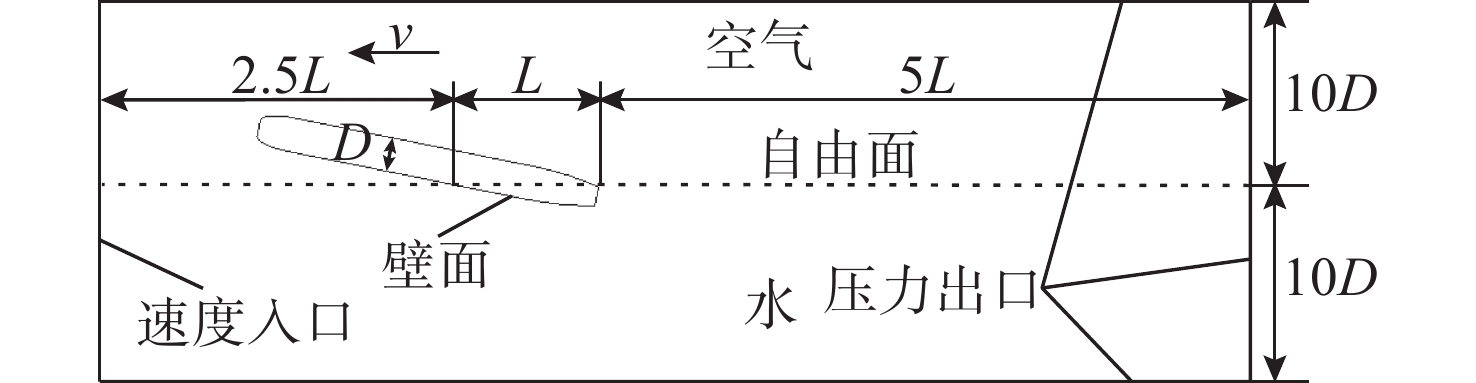
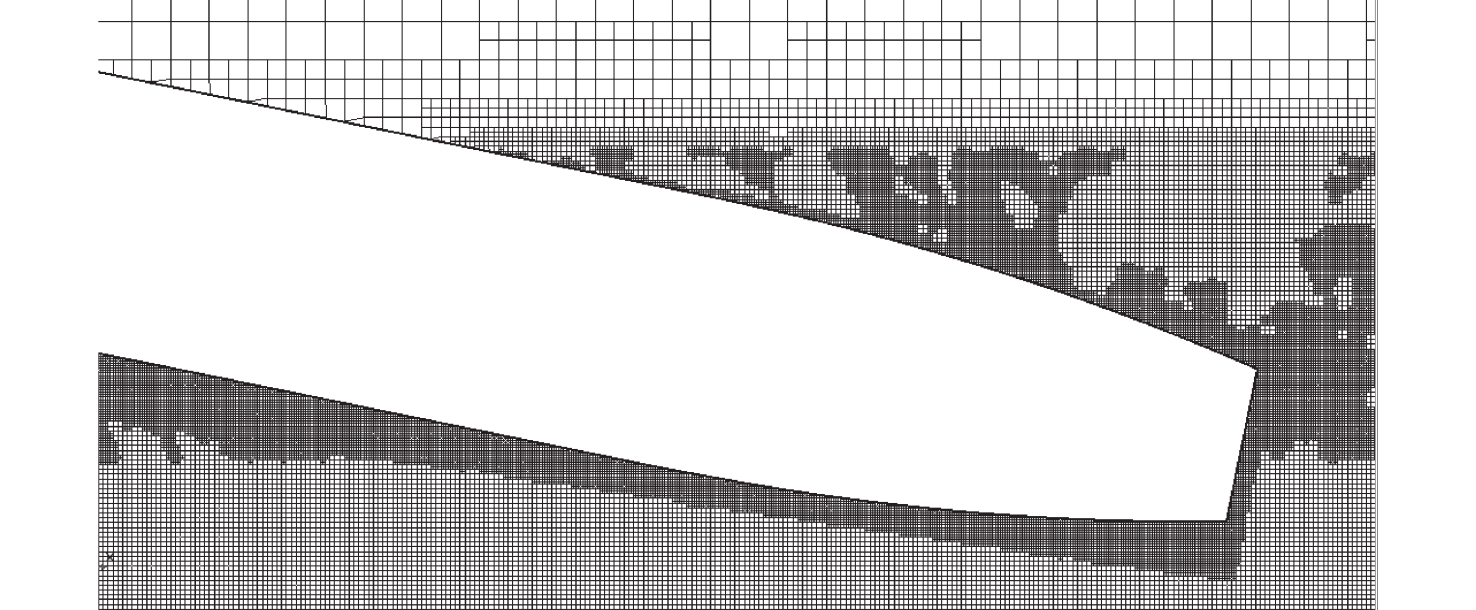
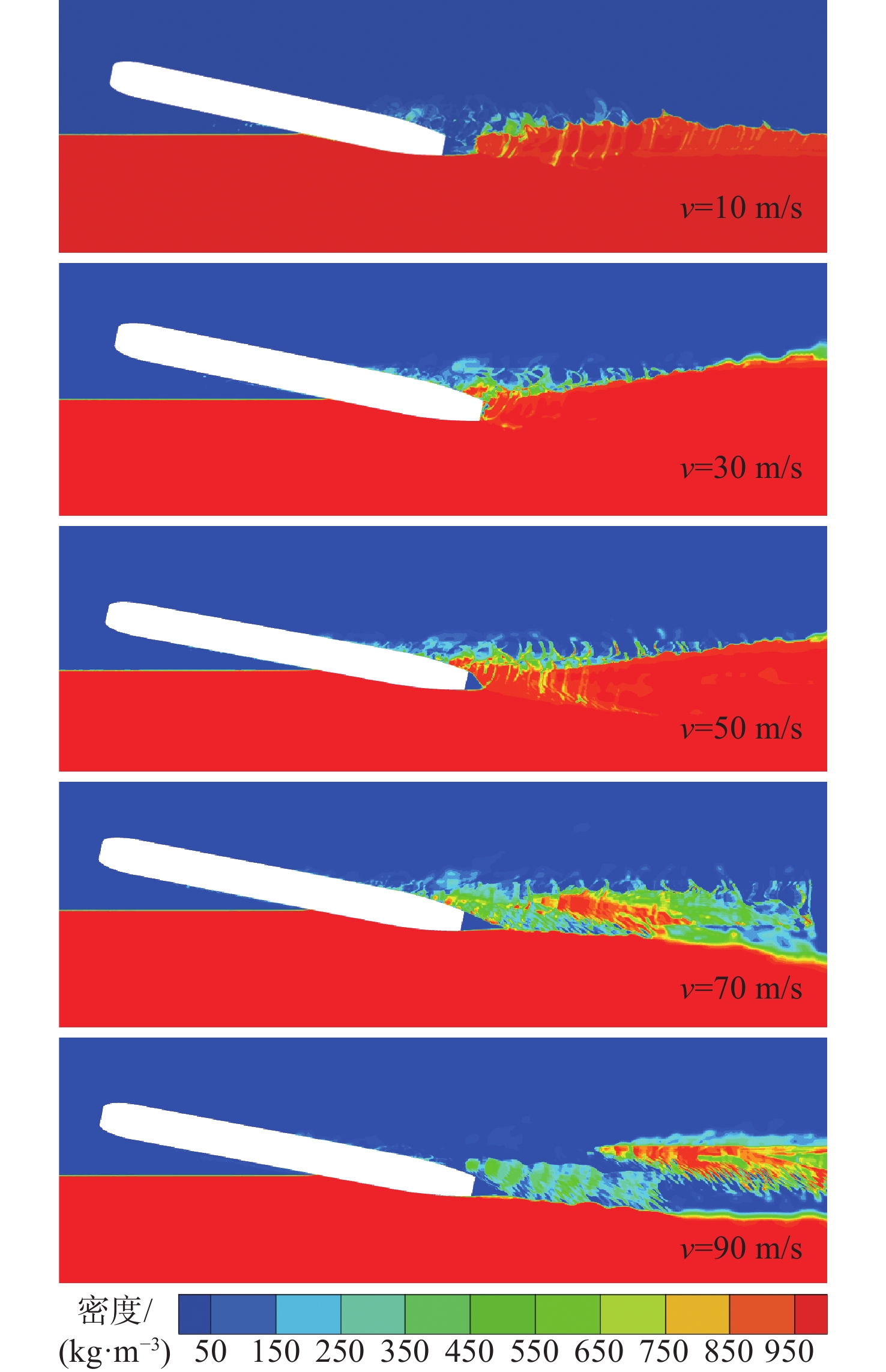
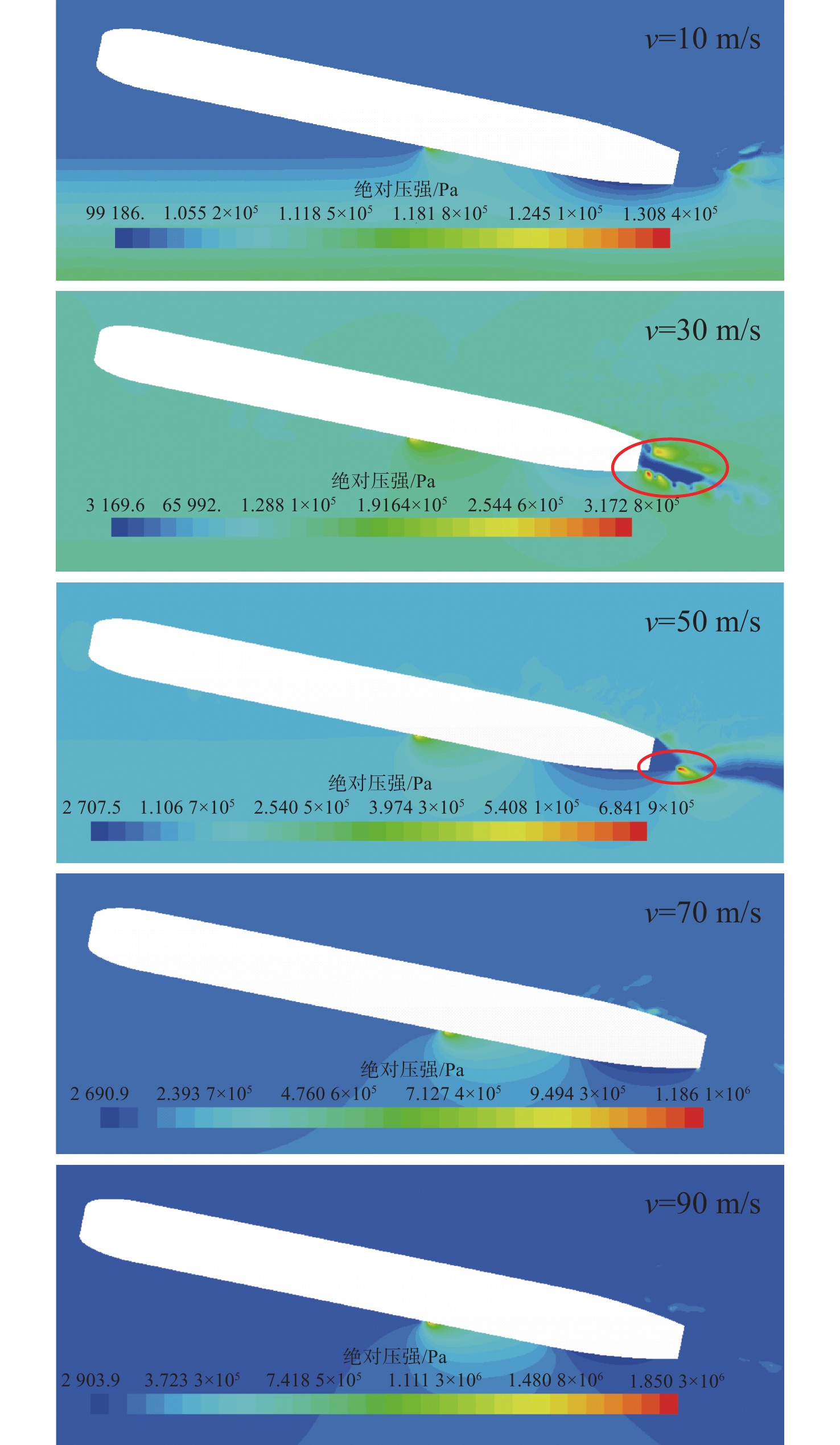
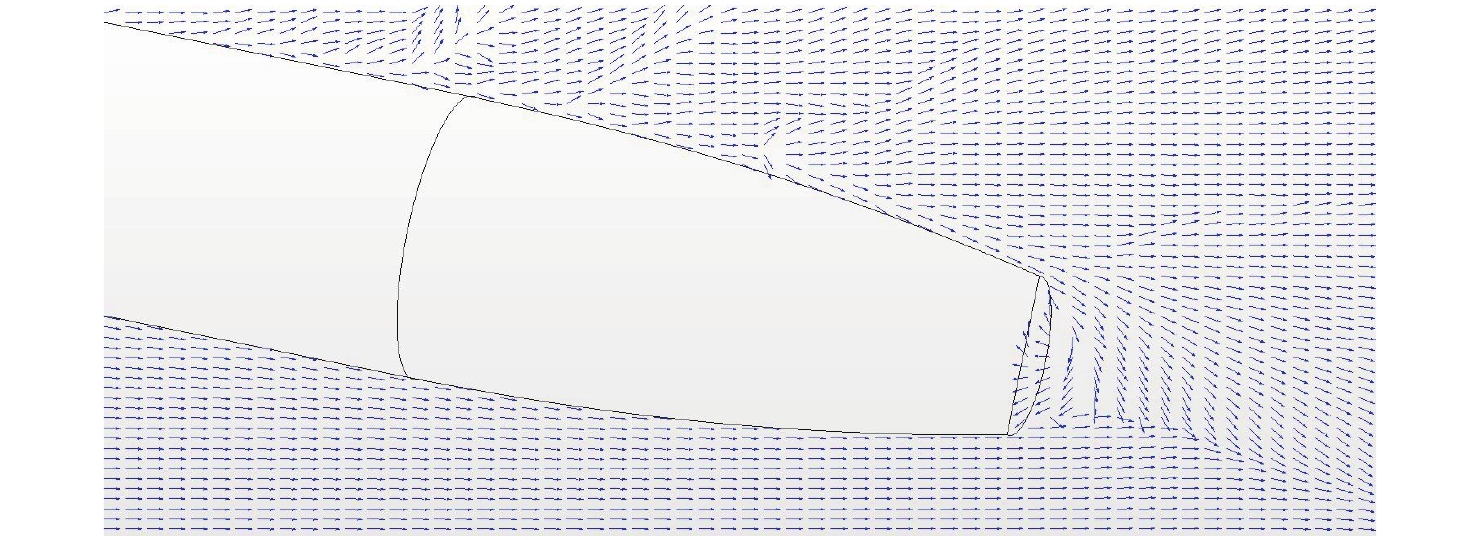
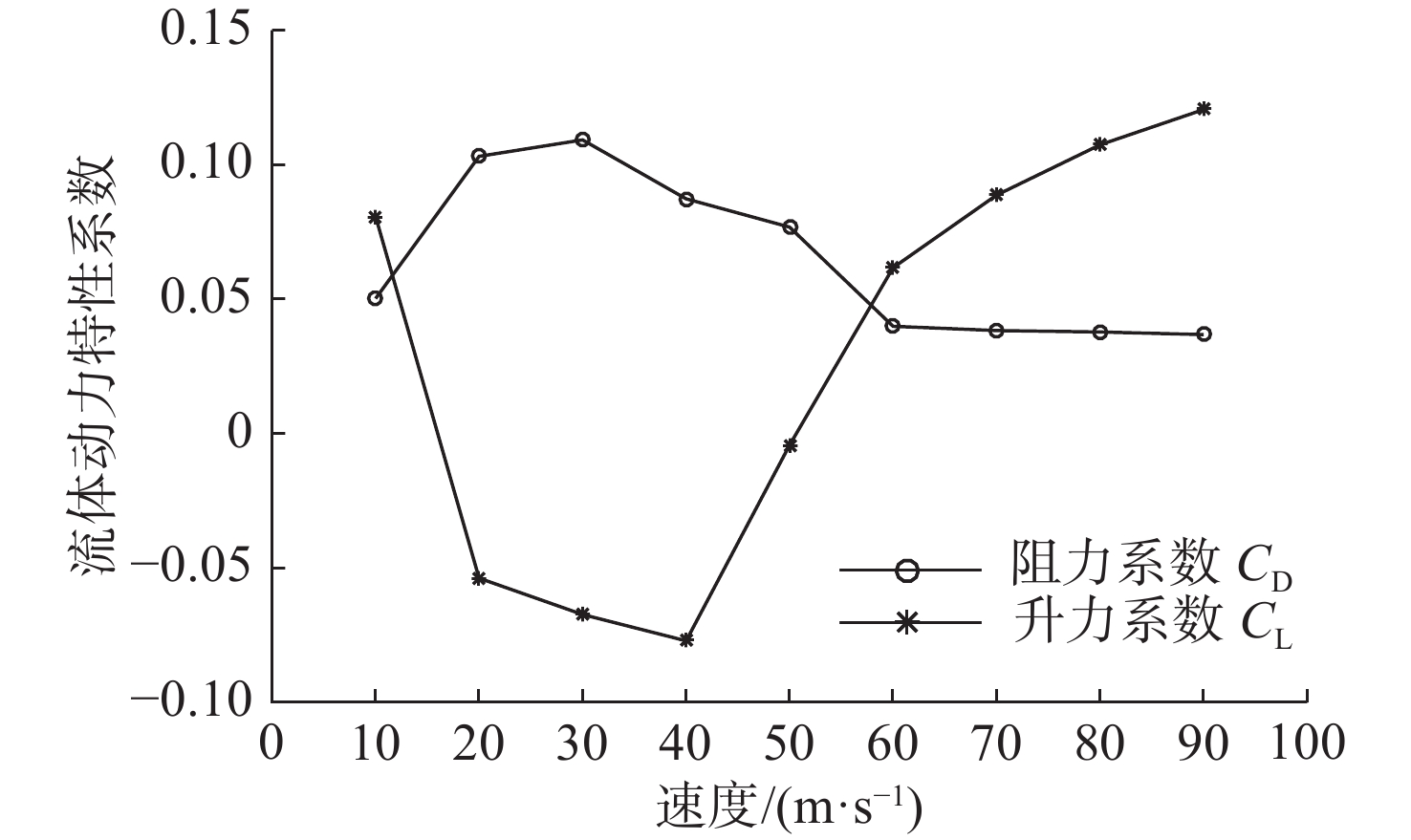
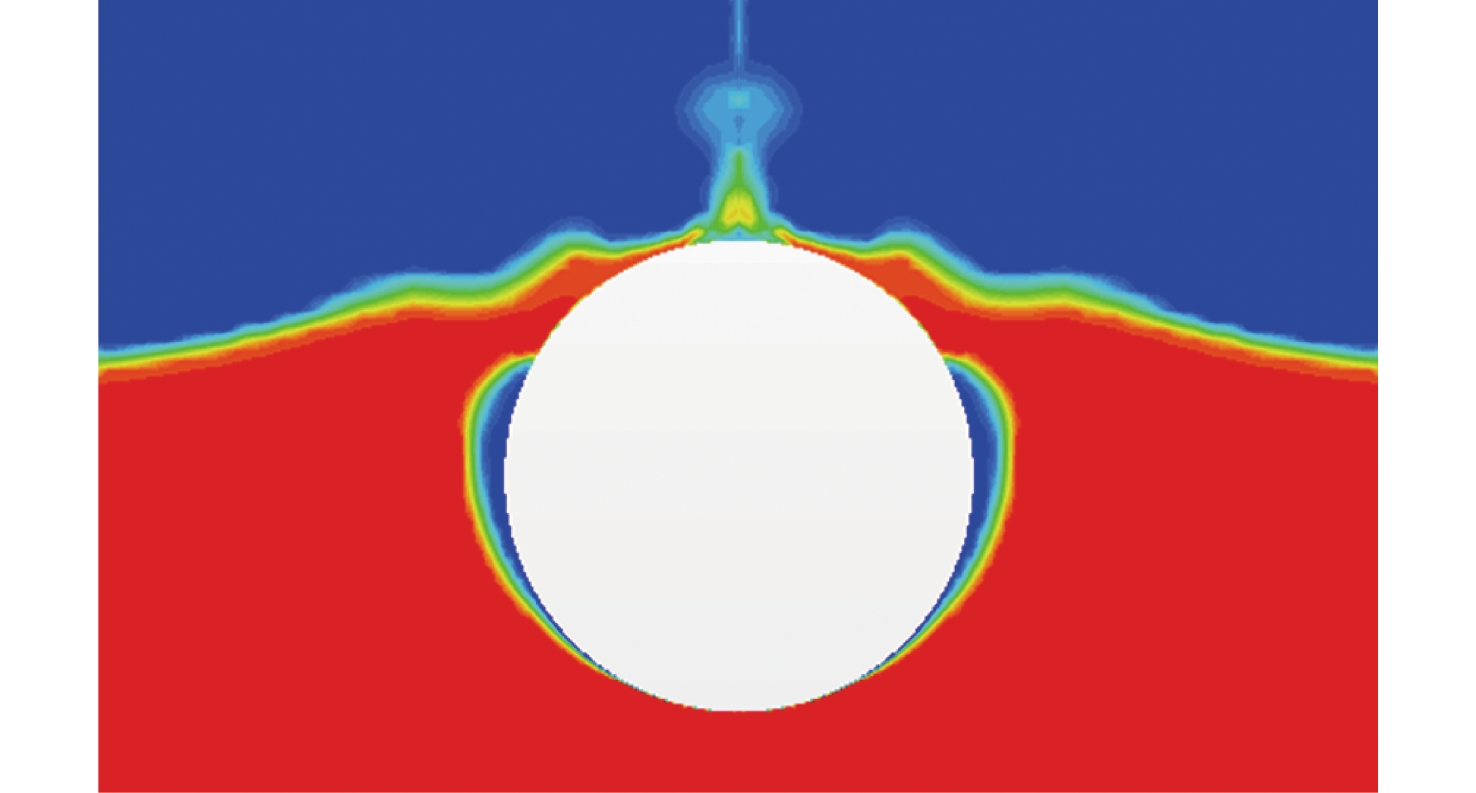
基于STAR-CCM+数值计算软件, 选用剪切应力传输k-ω湍流模型, 采用流体体积波和多重运动参考系构建航行器水面滑行数值仿真模型, 并进行了可行性验证。利用该模型对航行器在不同速度下的水面滑行工况进行数值仿真, 研究其流场特性和流体动力特性。仿真结果表明, 航行器在水面滑行速度高于30 m/s时, 尾端发生空化, 空泡内压力低于航行器尾端沾湿面压力; 空泡发生形变, 液面向航行器尾部卷曲并形成飞溅, 航行器尾端形成封闭空泡, 在泡内出现绕流, 泡内为低压区, 此时航行器的升力为负值, 待滑行速度提高, 空泡溃灭与大气连通, 升力值明显提高; 在航行器以不同速度进行水面滑行的过程中, 流场明显不同, 导致升力系数和阻力系数差异较大, 升力甚至出现负值, 其主要与不同速度下航行器尾端空化效果不同, 导致沾湿及航行器表面压力分布存在差异有关。研究结果可为航行器水面滑行工程应用提供理论参考。
刘富强, 孙元, 王广平, 等. 航行器水面滑行流场特性数值仿真[J]. 水下无人系统学报, 2022, 30(4): 485-493. doi: 10.11993/j.issn.2096-3920.202107003.